机场跑道异物探测系统中目标对象位置信息获取方法与流程
1.本发明涉及机场跑道探测技术领域,具体涉及一种机场跑道异物检测系统中目标对象位置信息获取方法。
背景技术:
2.近年来,为了解决人工巡查机场跑道异物质量效率低下的问题,国内外多个机场开始采用自动化机场跑道异物探测系统。从安装架设方式上,主流机场跑道异物探测系统分为固定式和移动式两类。
3.固定式探测系统的特点是能够全天时全天候工作,但是需要安装架设在固定地点,单套设备能覆盖的跑道范围有限,整条跑道的建设成本高昂,中小机场难以承受。移动式探测系统的特点是探测雷达安装架设在车上,随着车的移动进行机场跑道异物探测,虽然不能够全天时全天候探测,但是使用方式灵活,安装维护简单,一套设备即可完成整条跑道的探测,建设成本低,适合大多数中小机场使用。
4.当前,移动式机场跑道异物探测雷达主要有两种技术路线,一种是以美国机场跑道异物finder为代表的前视型雷达,采用调频连续波方案(fmcw),雷达发射电磁波与车辆行驶方向一致。另外一种是以某研究所产品为代表的侧视型雷达,采用调频连续波合成孔径方案(fmcw-sar),发射电磁波与车辆行驶方向垂直。侧视型机场跑道异物探测雷达在目标定位精度和虚警抑制方面比前视型有明显优势,但是扫描过程中不能停车,检测流程和清扫流程需要分开。无论是哪种系统,都要求把检测到的目标和车辆实时位置信息以机场常用的坐标格式提供给机场工作人员,便于其规划清理路线,快速开展清理工作。
技术实现要素:
5.有鉴于此,本发明提供了机场跑道异物检测系统中目标对象位置信息获取方法,能够是将目标和车辆行驶轨迹在车内用户显示界面的跑道示意图上正确且实时显示。
6.为达到上述目的,本发明的技术方案包括如下步骤:
7.步骤1:获取机场跑道、目标和车辆的gps信息。
8.步骤2:将机场跑道边缘的经纬度信息,通过墨卡托投影转化到平面坐标;对墨卡托投影进行优化,在跑道上选取一个顶点a作为第一参考点,对跑道边缘平面坐标做平移处理,使顶点a落在p坐标系上并且获得坐标平移参数;以顶点a在跑道一边的相邻点b为第二参考点,对跑道边缘平面坐标做旋转处理,使ab边与p坐标系重合并且获得坐标旋转参数;同时将a点作为起点,获得跑道ph坐标系,p坐标垂直于跑道中心线,h坐标平行于跑道中心线。
9.步骤3:利用坐标平移参数、坐标旋转参数以及跑道ph坐标系,将目标和车辆的gps信息进行转换得到目标的ph坐标以及车辆行驶轨迹的ph坐标。
10.进一步地,步骤1中采用如下具体方式获取机场跑道、目标和车辆的gps信息:
11.采用信号处理机在雷达扫描探测过程中不断获取雷达回波数据进行预处理,同时
接收gps信息,并将gps信息打包装入雷达目标预处理结果数据帧内,一起发送给数据分析服务器。
12.采用数据分析服务器进一步对数据帧进行分析,如果目标超过检测门限,则该数据帧内的目标和gps坐标就会发送给显控终端;由于同一个数据帧内gps信息和雷达目标信息是在同一时刻获取,因此该数据帧的gps信息即为探测到目标时刻的雷达gps坐标;目标极坐标和雷达gps坐标通过常规坐标转换,即可得到目标的gps坐标。
13.进一步地,步骤2中的机场跑道边缘的经纬度信息,采用如下方式得到:根据机场跑道的gps信息,利用差分gps标定机场跑道检测区域范围,获取跑道边缘的经纬度信息。
14.进一步地,步骤3之前,还包括对车辆的gps信息做平滑滤波处理。
15.进一步地,步骤3之后,还包括如下步骤:
16.步骤4:获得坐标转换后的目标和车辆行驶轨迹与跑道的相对位置;通过ph坐标判断目标和跑道相对位置,当目标不在跑道区域时不显示,仅显示在跑道区域的目标。
17.有益效果:
18.1、本发明提出的机场跑道异物检测系统中目标对象位置信息获取方法,该方法通过探测雷达信息与差分gps信息相结合,在不停止探测雷达移动的过程中对已有信息进行坐标转换及补偿,最终达成精确定位目标位置的目的。
19.2、本发明提出的机场跑道异物检测系统中目标对象位置信息获取方法,本发明可应用于移动式机场跑道异物探测系统,采用基准gps信息与探测雷达信息融合,通过对坐标变换的误差补偿形成机场跑道微小异物的位置信息获取,更大程度上为机场异物清理及定位提供信息指导。
20.3、本发明提出的机场跑道异物检测系统中目标对象位置信息获取方法,可适用于探测雷达与差分gps组件相结合的探测系统上,通过对机场跑道快速的扫描,达到发现微小异物并快速实时确定异物位置的目的。设计结果与实际应用结果表明,该方法可在机场跑道扫描区域内,最小发现异物直径10mm情况下,定位精度可达0.5m,为后续的异物清理工作提供更加便利的条件。
附图说明
21.图1为获取目标和车辆gps信息的系统原理框图;
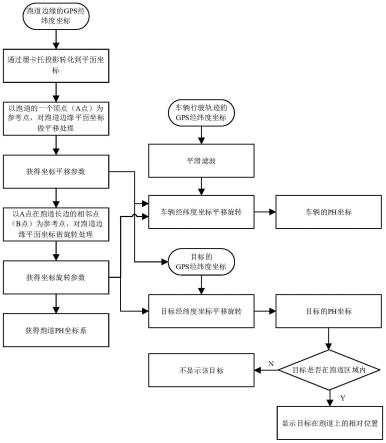
22.图2为目标和车辆行驶轨迹的ph坐标获取步骤流程图;
23.图3为跑道检测区域经纬度坐标图;
24.图4为跑道检测区域平面坐标图;
25.图5为墨卡托投影优化步骤201原理图;
26.图6为墨卡托投影优化步骤202原理图;
27.图7为ph坐标系下的目标位置和汽车轨迹图。
具体实施方式
28.下面结合附图并举实施例,对本发明进行详细描述。
29.本发明的目的是将目标和车辆行驶轨迹在车内用户显示界面的跑道示意图上正确且实时显示。机场常用坐标为ph坐标,其坐标轴垂直(p坐标)或平行(h坐标)于主跑道中
心线。而移动式机场跑道异物探测雷达探测到目标时,获取的是目标相对于雷达的极坐标信息,此时就需要将极坐标信息实时通过坐标变换转换为机场常用的ph坐标,并正确的显示到用户界面上。包括如下步骤:
30.步骤1:获取目标和车辆的gps信息。
31.首先,将差分gps(或北斗,下同)随探测雷达和用户显控终端一起安装在移动车辆上,工作过程中,差分gps通过串口输出两路信息,一路作为车辆实时gps位置坐标和速度信息,直接发送给用户显控终端;另外一路作为雷达实时gps位置坐标,发送给机场跑道异物探测雷达的信号处理机,用于获取目标对应的gps信息。
32.具体的获取目标和车辆gps信息的系统原理框图如图1所示。采用信号处理机在雷达扫描探测过程中不断获取雷达回波数据进行预处理,同时接收gps信息,并将gps信息打包装入雷达目标预处理结果数据帧内,一起发送给数据分析服务器。采用数据分析服务器进一步对数据帧进行分析,如果目标超过检测门限,则该数据帧内的目标和gps坐标就会发送给显控终端;由于同一个数据帧内gps信息和雷达目标信息是在同一时刻获取,因此该数据帧的gps信息即为探测到目标时刻的雷达gps坐标;目标极坐标和雷达gps坐标通过常规坐标转换,即可得到目标的gps坐标。
33.步骤2:将机场跑道边缘的经纬度信息,通过墨卡托投影转化到平面坐标;对墨卡托投影进行优化,在跑道上选取一个顶点a作为第一参考点,对跑道边缘平面坐标做平移处理,使顶点a落在p坐标系上并且获得坐标平移参数;以顶点a在跑道一边的相邻点b为第二参考点,对跑道边缘平面坐标做旋转处理,使ab边与p坐标系重合并且获得坐标旋转参数;同时将a点作为起点,获得跑道ph坐标系,p坐标垂直于跑道中心线,h坐标平行于跑道中心线。
34.步骤2中的机场跑道边缘的经纬度信息,采用如下方式得到:根据机场跑道的gps信息,利用差分gps标定机场跑道检测区域范围,获取跑道边缘的经纬度信息。
35.步骤3:利用坐标平移参数、坐标旋转参数以及跑道ph坐标系,将目标和车辆的gps信息进行转换得到目标的ph坐标以及车辆行驶轨迹的ph坐标。
36.步骤3之前,还包括对车辆的gps信息做平滑滤波处理,以便在坐标转换后获得更稳定的车辆行驶显示效果。
37.步骤4:获得坐标转换后的目标和车辆行驶轨迹与跑道的相对位置;通过ph坐标判断目标和跑道相对位置,当目标不在跑道区域时不显示,仅显示在跑道区域的目标。
38.实施例:
39.以机场上某块实际长
×
宽=35.3m
×
28m的检测区域为例,目标和车辆行驶轨迹的ph坐标获取步骤如图2所示,具体为:
40.(1)获取目标和车辆的gps信息
41.通过上文技术方案的方法,首先,将差分gps(或北斗,下同)随探测雷达和用户显控终端一起安装在移动车辆上,工作过程中,差分gps通过串口输出两路信息,一路作为车辆实时gps位置坐标和速度信息,直接发送给用户显控终端;另外一路作为雷达实时gps位置坐标,发送给机场跑道异物探测雷达的信号处理机,用于获取目标对应的gps信息。
42.(2)获取目标和车辆行驶轨迹的跑道ph坐标
43.201)利用差分gps标定机场跑道检测区域范围,获取跑道边缘的经纬度信息,如图
3所示;
44.202)将跑道边缘的经纬度信息,通过墨卡托投影转化到平面坐标,此时平面坐标并不是沿跑道坐标轴方向,如图4所示;
45.203)对墨卡托投影进行优化,以跑道的一个顶点(a点)为参考点,对跑道边缘平面坐标做平移处理,使跑道a点落在p坐标系上,如图5所示,获得坐标平移参数;以a点在跑道一边的相邻点(b点)为参考点,对跑道边缘平面坐标做旋转处理,使ab边与p坐标系重合,如图6所示,获得坐标旋转参数;同时将a点作为起点,获得跑道ph坐标系。
46.204)对汽车行驶轨迹的经纬度信息做平滑滤波处理,以便在坐标转换后获得更稳定的车辆行驶显示效果;
47.205)基于车辆的gps经纬度信息和步骤203)中墨卡托优化算法获得的平移旋转参数和ph坐标系,获得车辆行驶轨迹的ph坐标;
48.206)同样基于目标的gps经纬度信息和步骤203)中墨卡托优化算法获得的平移旋转参数和ph坐标系,计算出目标的ph坐标。
49.207)获得坐标转换后的目标和车辆行驶轨迹与跑道的相对位置,如图7所示;
50.208)通过ph坐标判断目标和跑道相对位置,当目标不在跑道区域时不显示,仅显示在跑道区域的目标。
51.此时便获取到了机场跑道异物的位置信息,并可通过显控软件实时显示出来。
52.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1