一种激光动态扫描测距方法及系统与流程
1.本发明涉及光电扫描技术领域,尤其公开了一种激光动态扫描测距方法及系统。
背景技术:
2.在现有技术中,对于空中多目标距离测量,常规方法是采用激光测距,但是由于激光发散角小,只能采用高精度跟踪实现单一目标跟踪测距,无法实现空中散布的多个目标快速测距。
3.因此,现有激光测距中无法实现空中散布的多个目标快速测距,是一件亟待解决的技术问题。
技术实现要素:
4.本发明提供了一种激光动态扫描测距方法及系统,旨在解决现有激光测距中无法实现空中散布的多个目标快速测距的技术问题。
5.本发明的一方面涉及一种激光动态扫描装置,包括红外搜索平台、激光跟踪平台和指挥控制计算机,红外搜索平台包括热像仪、图像处理器和信息处理器,
6.热像仪用于输出周视图像;
7.图像处理器与热像仪电连接,用于对热像仪输出的周视图像实施目标捕获和建航;
8.信息处理器与图像处理器电连接,用于将图像处理器捕获的目标信息上传至指挥控制计算机;
9.激光跟踪平台包括伺服控制器、万向架、以及安装于万向架上的激光测距机,激光测距机与信息处理器通信连接,用于接收信息处理器传送过来的目标信息,测定目标距离;
10.伺服控制器与激光测距机通信连接,用于控制该激光跟踪平台启停、调转和按规划路径运动,并控制激光测距机的启停,将获取的目标距离发送至指挥控制计算机。
11.进一步地,激光测距机上设有激光镜头,激光镜头内设有第一棱镜、第二棱镜、第一伺服电机、第二伺服电机、第一齿轮减速器、第二齿轮减速器和测角用的光栅尺,第一伺服电机通过第一齿轮减速器与第一棱镜相连接,第二伺服电机通过第二齿轮减速器与第二棱镜相连接,伺服控制器分别与第一伺服电机和第二伺服电机电连接,用于分别控制第一棱镜和第二棱镜绕轴心回转匀速运动。
12.本发明的另一方面涉及一种激光动态扫描测距方法,应用于上述的激光动态扫描装置中,激光动态扫描测距方法包括以下步骤:
13.在搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速运转,形成周视图像,图像处理器实时捕获目标,并对目标编号;
14.指挥控制计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令;
15.指挥控制计算机选择确定需要跟踪的目标编号并通知红外搜索平台;
16.红外搜索平台定时刷新选定目标坐标信息,并同时向指挥控制计算机和激光跟踪平台发送目标信息;
17.跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机。
18.进一步地,跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机的步骤之后包括:
19.待所有警告消除后,回复至搜索模式。
20.进一步地,跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机的步骤包括:
21.控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距。
22.进一步地,控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距的步骤包括:
23.依据远场薄棱镜近似分析理论,经过第一棱镜和第二棱镜的后的光束在两个方向上的偏转角度分量分别为:
24.φ
x
=δ1sin(θ1+θ
10
)
‑
δ2sin(θ2+θ
20
)
25.φ
y
=
‑
δ1cos(θ1+θ
10
)+δ2cos(θ2+θ
20
)
26.其中,第一棱镜和第二棱镜的光束偏转角大小分别为δ1=α1(n1‑
1)、δ2=α2(n2‑
1);θ1、θ2分别为第一棱镜和第二棱镜的y轴绕z轴的转角;
27.若第一棱镜和第二棱镜的结构参数完全一致,且当初始角均为π/2时,由上述公式演变为:
28.φ
x
=δcosθ1‑
δcosθ229.φ
y
=δsinθ1‑
δsinθ230.当改变两个转镜的转速方向和大小比例时,光束则按照预设的规则覆盖设定的区域,设第一棱镜转速为ω,第二棱镜转速为kω,则有:
[0031][0032][0033]
其中,光束运动的周期为ω,最大半径为2δ。
[0034]
进一步地,激光测距机测程与参数,接收到的功率计算公式为:
[0035][0036]
其中,pr为雪崩管接收到的功率;pt为激光器发射功率;kt为发射系统透过率;kr为接收系统透过率;a为接收物镜半径;ρ为目标反射系数;r为目标距离;k为目标面积与光斑面积之比系数;a为大气衰减系数。
[0037]
本发明的另一方面涉及一种激光动态扫描系统,应用于上述的激光动态扫描装置
中,激光动态扫描系统包括:
[0038]
搜索模块,用于在搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速运转,形成周视图像,图像处理器实时捕获目标,并对目标编号;
[0039]
第一通知模块,用于指挥控制计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令;
[0040]
第二通知模块,用于指挥控制计算机选择确定需要跟踪的目标编号并通知红外搜索平台;
[0041]
第三通知模块,用于红外搜索平台定时刷新选定目标坐标信息,并同时向指挥控制计算机和激光跟踪平台发送目标信息;
[0042]
控制模块,用于激光跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机。
[0043]
进一步地,激光动态扫描系统还包括:
[0044]
回复模块,用于待所有警告消除后,回复至搜索模式。
[0045]
进一步地,控制模块包括:
[0046]
控制单元,用于控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距。
[0047]
本发明所取得的有益效果为:
[0048]
本发明提供一种激光动态扫描测距方法及系统,激光动态扫描装置采用红外搜索平台、激光跟踪平台和指挥控制计算机,红外搜索平台包括热像仪、图像处理器和信息处理器,热像仪用于输出周视图像;图像处理器用于对热像仪输出的周视图像实施目标捕获和建航;信息处理器用于将图像处理器捕获的目标信息上传至指挥控制计算机;激光跟踪平台采用伺服控制器、万向架、以及安装于万向架上的激光测距机,伺服控制器用于控制该激光跟踪平台启停、调转和按规划路径运动,并控制激光测距机的启停,将获取的目标距离发送至指挥控制计算机。本发明提供的激光动态扫描测距方法及系统,采用动态扫描测距,可实现空中多目标距离测量;采用伺服控制,受人为因素和自然因素干扰小。
附图说明
[0049]
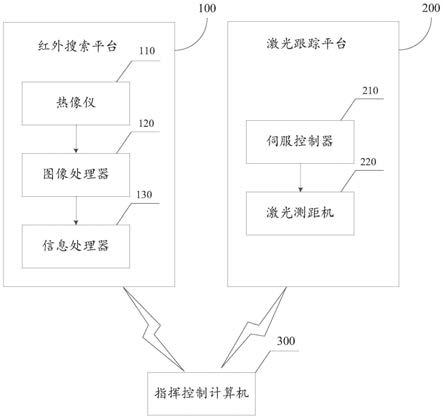
图1为本发明提供的激光动态扫描装置一实施例的功能框图;
[0050]
图2为本发明提供的激光动态扫描装置一实施例的结构示意图;
[0051]
图3为本发明提供的激光动态扫描测距方法第一实施例的流程示意图;
[0052]
图4为本发明提供的激光动态扫描测距方法第二实施例的流程示意图;
[0053]
图5为本发明提供的激光动态扫描装置一实施例采用激光镜头改变光束方向,实现激光快速扫描的原理示意图;
[0054]
图6为发明提供的激光动态扫描装置一实施例基于棱镜组的光束控制示意图;
[0055]
图7为发明提供的激光动态扫描装置一实施例的光束角度偏移示意图;
[0056]
图8为发明提供的激光动态扫描装置一实施例的正弦扫描均匀分布策略的平台扫描示意图;
[0057]
图9为发明提供的激光动态扫描装置一实施例的正弦扫描均匀分布策略的激光测距仿真结果示意图;
[0058]
图10为发明提供的激光动态扫描装置一实施例的梅花瓣中间密集扫描策略的平台扫描示意图;
[0059]
图11为发明提供的激光动态扫描装置一实施例的梅花瓣中间密集扫描策略的激光测距仿真结果示意图;
[0060]
图12为发明提供的激光动态扫描装置一实施例的测距机轨迹图;
[0061]
图13为发明提供的激光动态扫描测距系统第一实施例的功能框图;
[0062]
图14为发明提供的激光动态扫描测距系统第二实施例的功能框图;
[0063]
图15为图13中所示的控制模块一实施例的功能模块示意图。
[0064]
附图标号说明:
[0065]
100、红外搜索平台;200、激光跟踪平台;300、指挥控制计算机;110、热像仪;120、图像处理器;130、信息处理器;210、伺服控制器;220、激光测距机;221、激光镜头;10、搜索模块;20、第一通知模块;30、第二通知模块;40、第三通知模块;50、控制模块;60、回复模块;51、控制单元。
具体实施方式
[0066]
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
[0067]
如图1和图2所示,本发明一实施例提出一种激光动态扫描装置,包括红外搜索平台100、激光跟踪平台200和指挥控制计算机300,红外搜索平台100包括热像仪110、图像处理器120和信息处理器130,其中,热像仪110用于输出周视图像;图像处理器120与热像仪110电连接,用于对热像仪110输出的周视图像实施目标捕获和建航;信息处理器130与图像处理器120电连接,用于将图像处理器120捕获的目标信息上传至指挥控制计算机300;激光跟踪平台200包括伺服控制器210、万向架、以及安装于万向架上的激光测距机220,激光测距机220与信息处理器130通信连接,用于接收信息处理器130传送过来的目标信息,测定目标距离;伺服控制器210与激光测距机220通信连接,用于控制该激光跟踪平台启停、调转和按规划路径运动,并控制激光测距机220的启停,将获取的目标距离发送至指挥控制计算机300。本实施例提供的激光动态扫描装置,采用动态扫描测距,可实现空中多目标距离测量;采用伺服控制,受人为因素和自然因素干扰小。
[0068]
在上述结构中,请见图2,图2为本发明提供的激光动态扫描装置一实施例的结构示意图,本本实施例中,激光测距机220上设有激光镜头221,激光镜头221内设有第一棱镜、第二棱镜、第一伺服电机、第二伺服电机、第一齿轮减速器、第二齿轮减速器和测角用的光栅尺,第一伺服电机通过第一齿轮减速器与第一棱镜相连接,第二伺服电机通过第二齿轮减速器与第二棱镜相连接,伺服控制器210分别与第一伺服电机和第二伺服电机电连接,用于分别控制第一棱镜和第二棱镜绕轴心回转匀速运动。本实施例提供的激光动态扫描装置,采用伺服控制器210来分别控制第一伺服电机和/或第二伺服电机动作,相应地控制第一棱镜和和/或第二棱镜绕轴心回转匀速运动,自动化程度高,采用伺服控制,受人为因素和自然因素干扰小。
[0069]
请见图3,图3为本发明提供的激光动态扫描测距方法一实施例的流程示意图,该激光动态扫描测距方法,应用于上述的激光动态扫描装置中,包括以下步骤:
[0070]
步骤s100、在搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速运转,形成周视图像,图像处理器实时捕获目标,并对目标编号。
[0071]
搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速(1周/s)运转,形成周视图像;同时图像处理器实时捕获目标,并对目标编号。
[0072]
步骤s200、指挥控制计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令。
[0073]
指控计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令。
[0074]
步骤s300、指挥控制计算机选择确定需要跟踪的目标编号并通知红外搜索平台。
[0075]
指挥员选择确定需要跟踪的目标编号并通知红外搜索平台。
[0076]
步骤s400、红外搜索平台定时刷新选定目标坐标信息,并同时向指挥控制计算机和激光跟踪平台发送目标信息。
[0077]
红外搜索平台定时刷新选定目标坐标信息,并同时向指控计算机和激光跟踪平台发送目标信息。
[0078]
步骤s500、跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机。
[0079]
跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制作用下进行运动,并将获取的目标距离发至指挥控制计算机。
[0080]
本实施例提供的激光动态扫描测距方法,同现有技术相比,通过在搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速运转,形成周视图像,图像处理器实时捕获目标,并对目标编号;指挥控制计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令;指挥控制计算机选择确定需要跟踪的目标编号并通知红外搜索平台;红外搜索平台定时刷新选定目标坐标信息,并同时向指挥控制计算机和激光跟踪平台发送目标信息;跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机。本实施例提供的激光动态扫描测距方法,采用动态扫描测距,可实现空中多目标距离测量;采用伺服控制,受人为因素和自然因素干扰小。
[0081]
进一步地,参见图4,图4为本发明提供的激光动态扫描测距方法第二实施例的流程示意图,在第一实施例的基础上,步骤s500之后包括:
[0082]
步骤s600、待所有警告消除后,回复至搜索模式。
[0083]
待所有警告消除后,系统回复至搜索模式。在搜索状态下,基于图像检测、识别目标只能得到目标的方位及俯仰角信息。鉴于图像多帧关联处理及目标信息输出滞后,空间真实目标位置与图像检测、识别目标位置存在偏差,搜索状态实现目标动态测距是一项工程挑战。考虑目标空间位置偏差,激光测距机能量、束散角限制,伺服控制动态响应速度、指向精度等多种因素影响,拟采用激光扫描扩束或结构光束技术实现动态测距。激光测距机单脉冲能量约80mj,激光重频50~100hz,束散角1mrad扩束约为15mrad,以确保系统在误差限内实现空间目标概率测距。
[0084]
进一步地,本实施例提供的激光动态扫描测距方法,步骤s500具体包括:
[0085]
步骤s510、控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现
设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距。
[0086]
伺服控制器控制第一棱镜和第二棱镜动作,改变第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹;并采用激光扫描扩束或结构光束技术实现动态测距。
[0087]
本实施例提供的激光动态扫描测距方法,同现有技术相比,通过控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距。本实施例提供的激光动态扫描测距方法,采用伺服控制,受人为因素和自然因素干扰小;采用激光扫描扩束或结构光束技术实现动态测距,测试精度高。
[0088]
优选地,请见图1至图12,本实施例提供的激光动态扫描测距方法,按玫瑰线扫描阐述如下:
[0089]
1)基本原理
[0090]
采用激光镜头改变光束方向,实现激光快速扫描的原理如图5和图6所示。
[0091]
激光镜头由第一棱镜和第二棱镜构成,第一棱镜p1和第二棱镜p2绕中心轴线转动,依靠光线的折射改变平行入射光线的方向,通过控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,可以实现一定规律的运动轨迹。
[0092]
依据远场薄棱镜近似分析理论,由图7可知,经过第一棱镜和第二棱镜后的光束在两个方向上的偏转角度分量分别为:
[0093]
φ
x
=δ1sin(θ1+θ
10
)
‑
δ2sin(θ2+θ
20
)
ꢀꢀ
(1)
[0094]
φ
y
=
‑
δ1cos(θ1+θ
10
)+δ2cos(θ2+θ
20
)
ꢀꢀ
(2)
[0095]
其中,第一棱镜和第二棱镜的光束偏转角大小分别为δ1=α1(n1‑
1)、δ2=α2(n2‑
1);θ1、θ2分别为第一棱镜和第二棱镜的y轴绕z轴的转角。
[0096]
设计中若第一棱镜和第二棱镜的结构参数完全一致,且当初始角均为
π
/2时,由上述公式演变为:
[0097]
φ
x
=δcosθ1‑
δcosθ2ꢀꢀ
(3)
[0098]
φ
y
=δsinθ1‑
δsinθ2ꢀꢀ
(4)
[0099]
则当两个棱镜的转角相等时,公式可以看出两个偏转角始终为0,能够保证通过棱镜的光束不改变方向。
[0100]
而当改变两个转镜的转速方向和大小比例时,光束则按照一定的规则覆盖一定的区域。设第一棱镜转速为ω,第二棱镜转速为kω(k可为正负),则有:
[0101][0102][0103]
其中,光束运动的周期为ω,最大半径为2δ。
[0104]
2)激光跟踪平台扫描与激光控制
[0105]
跟踪平台以搜索平台发来的目标坐标值为驱动进行随动运动,运动过程中进行速度规划,适时启动激光测距。
[0106]
基本策略为:
[0107]
a)按照每个目标约0.8s的时间进行匀速扫描,其余时间实施快速调转。
[0108]
b)在目标匀速扫描期间,启动激光测距机进行测距。
[0109]
c)调整棱镜运动初始角、速度方向和速度比值,以调整激光斑点在扫描区域上的分布。
[0110]
根据以上策略,按照激光斑点均匀分布和中间密集的原则,随机在一圈上设置4个目标点,平台扫描和激光测距仿真结果分别如图8至图11所示。
[0111]
在图8和图9中,坐标单位为mrad,横轴表示运动一周。方框代表12km处24m2的目标,黑色虚线框为接近目标门槛值,在该阈值内减速、启动激光测距;激光测距频率为100hz;正弦虚线表示光轴的运动轨迹,小虚线圆代表2mrad的激光斑点。
[0112]
对比图10和图11,正弦扫描策略激光斑点集中于扫描带的上下沿,梅花瓣扫描策略激光斑点集中于扫描带的中心。考虑到目标角位置报告存在误差,采用梅花瓣扫描策略。
[0113]
3)激光动态测距分析计算
[0114]
测距频率100hz;数据刷新率:1hz;距离:≥15km;扫描步进范围:
±
0.1mrad。
[0115]
主要目标是配合光电雷达,实现对可疑目标进行快速测距,能够准确判断出目标。光电雷达以5s为一个周期,对周围进行360
°
扫描,以优选5个可疑目标为上限,同步启动高重频测距机,对目标进行测距。系统与测距相关的主要有机动平台、光电搜索转塔、跟踪光电转塔等。
[0116]
光电雷达搜索转动,以5s为一个周期,对周围进行360
°
扫描,发现可疑目标,同步启动高重频测距机,系统规划出跟踪转塔的扫描路径。激光测距机在跟踪转台的运动基础上再进行玫瑰花瓣式扫描,提高测距捕获概率,如图12所示。
[0117]
注:黑色圆为可疑目标,黑色曲线为光电跟踪扫描曲线,玫瑰花瓣为采用risely棱镜差速控制得出的离散测距点描绘出的轨迹图。
[0118]
跟踪转塔运动到可疑目标大致方位后,按照规划曲线并降低转速约20
°
/s(可以停留,但停留后启动的惯量大,耗能高,系统不倾向这种方法)启动测距。
[0119]
系统推荐采用risely棱镜对激光发射进行扫描,接收部分不动,扫描曲线按照玫瑰花瓣式进行,主要考虑了目标运动及该方法可以提高目标测距截获概率至100%;扫描的空域大概在2mrad左右(玫瑰花瓣的空域)。主要的测距目标的统计尺寸如下:
[0120]
阿帕奇:2.5m
×
2m;f15:2m
×
2m;全球鹰:1m
×
1m(均为正面)。
[0121]
3.1)指标合理性计算
[0122]
测距机跟随系统水平旋转,旋转速度90
°
/s(1571mrad/s),可以减至20
°
/s(349mrad/s)。
[0123]
a)测距发射接收同轴度匹配要求计算
[0124]
测距机跟随系统水平旋转,旋转速度为90
°
/s(1571mrad/s),在疑似目标处可以减至20
°
/s(349mrad/s),以典型值15km目标计算,测距机激光往返所需时间为:
[0125]
t=2l/c=(2
×
1.5
×
104m)/(3
×
108m/s)=0.1ms
[0126]
当测距激光对准目标发射后,在t=0.1ms时间后,激光返回至测距机处,测距机接收系统已转过角度为:
[0127]
θ90=1571mrad/s
×
0.1ms=0.157mrad
[0128]
θ20=349mrad/s
×
0.1ms=0.035mrad
[0129]
根据上述计算,测距机接收视场应对应扩大0.5mrad/0.1mrad,以保证在系统旋转的同时仍能将目标位置测回。
[0130]
b)测距重频计算及发射和接收视场确定
[0131]
雷达可初步确定目标位置,而测距机激光发射的束散角难以一次性覆盖雷达确定的目标位置空域,因此测距机需在初步确定的位置附近进行一定扫描,藉此捕获目标位置。
[0132]
对静止目标雷达所能提供的位置精度为2mrad,对运动目标雷达所能提供的位置精度为10mrad,针对不同激光束散角(典型值)所需扫描次数如下表一所示。
[0133]
发射束散角mrad扫描次数(2mrad)扫描次数(10mrad)0.210025000.51640014100
[0134]
表一
[0135]
系统要求单个目标需在0.2s时间内完成测距,因此对应的测距重频如下表二所示。
[0136]
发射束散角mrad重频(扫描2mrad)hz重频(扫描10mrad)khz0.250012.50.58021200.5
[0137]
表二
[0138]
激光测距一次所需时间为0.1ms,因此激光测距重频最高不能超过10khz,考虑到数据处理、激光扫描所需的时间,因此激光发射束散角建议不低于0.5mrad,对应激光接收视场角不低于1.5mrad。
[0139]
3.2)激光能量计算
[0140]
激光测距机测程与参数,接收到的功率计算公式为:
[0141][0142]
其中,pr为雪崩管接收到的功率(w);pt为激光器发射功率(w);kt为发射系统透过率;kr为接收系统透过率;a为接收物镜半径(mm);ρ为目标反射系数;r为目标距离(mm);k为目标面积与光斑面积之比系数,α为大气衰减系数。
[0143]
雪崩管接收到的光功率1.65
×
10
‑9w,在样机试验上计算的国产直径0.5mm的雪崩管最小可探测功率4.814
×
10
‑9w~5.06
×
10
‑
10
w中,因此峰值功率为1mw可以满足测距需求,以激光脉宽10ns计算,单脉冲激光能量为10mj。
[0144]
根据系统使用需求,在4s周期内最多需要对5个目标进行测距,每次测距时间为0.2s,实际测距机使用的占空比为25%,连续使用时间约10min,激光重频80hz/2khz,激光能量不低于10mj。
[0145]
请见图13,图13为发明提供的激光动态扫描测距系统第一实施例的功能框图,该激光动态扫描系统应用于上述的激光动态扫描装置中,激光动态扫描系统包括搜索模块10、第一通知模块20、第二通知模块30、第三通知模块40和控制模块50,搜索模块10,用于在
搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速运转,形成周视图像,图像处理器实时捕获目标,并对目标编号;第一通知模块20,用于指挥控制计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令;第二通知模块30,用于指挥控制计算机选择确定需要跟踪的目标编号并通知红外搜索平台;第三通知模块40,用于红外搜索平台定时刷新选定目标坐标信息,并同时向指挥控制计算机和激光跟踪平台发送目标信息;控制模块50,用于激光跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机。本实施例提供的激光动态扫描系统,采用动态扫描测距,可实现空中多目标距离测量;采用伺服控制,受人为因素和自然因素干扰小。
[0146]
本实施例提供的激光动态扫描测距系统,同现有技术相比,通过在搜索模式下,激光跟踪平台处于待命状态,红外搜索平台匀速运转,形成周视图像,图像处理器实时捕获目标,并对目标编号;指挥控制计算机收到目标告警信号后,自动通知激光跟踪平台的激光镜头运动,并启动激光跟踪平台等待接收轨迹命令;指挥控制计算机选择确定需要跟踪的目标编号并通知红外搜索平台;红外搜索平台定时刷新选定目标坐标信息,并同时向指挥控制计算机和激光跟踪平台发送目标信息;跟踪平台依据目标轨迹命令,自动规划运动路径和激光测距,在伺服控制器的伺服控制作用下进行运动,并将获取的目标距离发送至指挥控制计算机。本实施例提供的激光动态扫描测距系统,采用动态扫描测距,可实现空中多目标距离测量;采用伺服控制,受人为因素和自然因素干扰小。
[0147]
进一步地,参见图14,图14为发明提供的激光动态扫描测距系统第二实施例的功能框图,在第一实施例的基础上,激光动态扫描系统还包括回复模块60,回复模块60,用于待所有警告消除后,回复至搜索模式。
[0148]
回复模块60待所有警告消除后,系统回复至搜索模式。在搜索状态下,基于图像检测、识别目标只能得到目标的方位及俯仰角信息。鉴于图像多帧关联处理及目标信息输出滞后,空间真实目标位置与图像检测、识别目标位置存在偏差,搜索状态实现目标动态测距是一项工程挑战。考虑目标空间位置偏差,激光测距机能量、束散角限制,伺服控制动态响应速度、指向精度等多种因素影响,拟采用激光扫描扩束或结构光束技术实现动态测距。激光测距机单脉冲能量约80mj,激光重频50~100hz,束散角1mrad扩束约为15mrad,以确保系统在误差限内实现空间目标概率测距。
[0149]
优选地,请见图15,图15为图13中所示的控制模块一实施例的功能模块示意图,在本实施例中,控制模块50包括控制单元51,控制单元51,用于控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距。
[0150]
控制单元51采用伺服控制器控制第一棱镜和第二棱镜动作,改变第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹;并采用激光扫描扩束或结构光束技术实现动态测距。
[0151]
本实施例提供的激光动态扫描测距系统,同现有技术相比,通过控制第一棱镜和第二棱镜的初始转角、转速的大小和转速的方向,实现设定规律的运动轨迹,采用激光扫描扩束或结构光束技术实现动态测距。本实施例提供的激光动态扫描测距系统,采用动态扫描测距,可实现空中多目标距离测量;采用伺服控制,受人为因素和自然因素干扰小;采用
激光扫描扩束或结构光束技术实现动态测距,测试精度高。
[0152]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1