陶瓷基复合材料涡轮导向叶片高温双轴强度试验器及方法
1.本发明属于结构力学测试领域,主要涉及陶瓷基复合材料涡轮导向叶片高温双轴强度试验器的设计以及操作方法。
背景技术:
2.为了提高效率,航空发动机的涡轮进口温度不断提高。目前,先进航空发动机的涡轮进口温度高达1700~2000℃,高温合金已难以在该温度下稳定工作。因此,具有低密度、耐高温、抗氧化等特点的陶瓷基复合材料(ceramic matrix composite,简称cmc)成为先进航空发动机热端部件的首选材料。
3.陶瓷基复合材料涡轮导向叶片(以下简称cmc涡轮导叶)在工作时被高温高压燃气包围,承受了较大的气动载荷和热应力。另外,不同于高温合金叶片,cmc涡轮导叶的内部编织结构与连接形式复杂,仅靠数值模拟无法准确获得其最大承载能力及失效模式。目前,高温静强度试验是验证cmc涡轮导叶失效模式及承载能力的最快速、有效的措施。工作状态下涡轮导向叶片周围的压力场可简化为沿发动机环向和轴向两个方向的力,为了更准确的获得服役状态下cmc涡轮导叶的承载能力与失效模式,需要开发一种能够在高温环境下对cmc涡轮导叶施加沿发动机环向与轴向两个方向载荷的试验技术。国内外公开发布的现有技术资料中鲜有关于涡轮导向叶片试验器的报道:中国专利cn112710551a《一种复合材料叶片静强度试验装置》中公开了一种复合材料叶片静强度试验装置,但该方法只适用于常温试验,无法施加温度载荷;日本ihi公司对cmc涡轮导叶进行了常温静强度试验(fumiaki watanabe, takeshi nakamura, yousuke mizokami. design and testing for ceramic matrix composite turbine vane[c]. turbomachinery technical conference and exposition. charlotte, north carolina, usa. 2017,6:1
‑
8.),其试验装置无法调节环向与轴向载荷比例,仅能对特定叶片进行试验。
[0004]
基于国内外技术现状以及cmc涡轮导叶的应用需求,有必要设计一种能够在极高温度下对cmc涡轮导叶同时进行轴向与环向加载的静强度试验设备,以实现陶瓷基复合材料涡轮导向叶片高温静强度的测量与分析,完成对cmc涡轮导叶承载能力及失效模式的验证。
技术实现要素:
[0005]
本发明针对现有技术中的不足,提供一种能在1300℃高温下对陶瓷基复合材料涡轮导向叶片进行双轴加载并且加载过程中可对导向叶片进行多点测温以及应变场测量的高温双轴强度试验装置以及实验方法。
[0006]
为实现上述技术目的,本发明采取的技术方案为:陶瓷基复合材料涡轮导向叶片高温双轴强度试验器,包括试验台架、保温箱、叶片夹具、双轴定位装置、热电偶、多通道测温仪、石英灯、dic系统以及冷却循环系统,保温箱安装在试验台架上,叶片夹具用于夹紧陶瓷基复合材料涡轮导向叶片下端并置于保温箱中,
双轴加载装置包括两套互成90
°
安装的加载机构,每套加载机构均包括电动缸和陶瓷推杆,陶瓷推杆的一端与对应的电动缸连接,另一端伸入保温箱中与陶瓷基复合材料涡轮导向叶片上端接触,两个陶瓷推杆能在电动缸的带动下对陶瓷基复合材料涡轮导向叶片预紧,电动缸上安装有力与位移传感器,用于采集陶瓷基复合材料涡轮导向叶片的力与位移数据,热电偶安装在保温箱上,用于采集陶瓷基复合材料涡轮导向叶片温度,石英灯安装在保温箱内,用于对陶瓷基复合材料涡轮导向叶片加热,多通道测温仪与热电偶连接,用于处理热电偶测得的温度数据,dic系统对陶瓷基复合材料涡轮导向叶片进行观测,用于采集陶瓷基复合材料涡轮导向叶片应变场数据,冷却循环系统用于对石英灯降温。
[0007]
本发明的进一步的优化方案为:上述的陶瓷基复合材料涡轮导向叶片由依次连接的叶片上缘板、叶身和叶片下缘板组成,叶片夹具包括夹具盖板和夹具底座,叶片下缘板插入夹具盖板和夹具底座之间,由夹具盖板和夹具底座配合锁死,夹具盖板和夹具底座之间通过高温螺钉固定。
[0008]
上述的电动缸由伺服电机与行星减速器组成,伺服电机连接行星减速器,行星减速器输出端通过转接杆与陶瓷推杆连接。
[0009]
上述的试验台架上安装有两道滑轨,双轴加载装置通过电动缸支架分别安装在对应的滑轨上,电动缸与电动缸支架连接,电动缸支架沿着滑轨滑动或锁紧固定在滑轨上,从而使双轴加载装置能靠近或远离保温箱。
[0010]
上述的电动缸上的力与位移传感器将采集的信号发送至电动缸控制柜,电动缸控制柜可驱动电动缸对叶片进行加载;石英灯与多通道测温仪连接,多通道测温仪根据热电偶采集的叶片表面温度数据对石英灯功率进行调整;保温箱箱壁上设有石英玻璃窗,dic系统包括镜头,镜头能透过石英玻璃窗对准陶瓷基复合材料涡轮导向叶片的叶盆侧,镜头将采集的图像信号发送至dic图像采集设备上。
[0011]
上述的保温箱的两侧壁上对应安装有石英灯罩,石英灯罩内安装有导轨,滑块可在导轨上水平滑动,导轨可上下移动或通过锁紧螺母固定,石英灯两端均伸出至保温箱外侧,进入石英灯罩内,且石英灯两端分别安装在对应的滑块上。
[0012]
上述的冷却循环系统包括水循环软管、水箱和水泵,转接杆以及导轨内留有水冷通道,水循环软管将各水冷通道连接起来,形成水循环,水循环的一端连接水泵,另一端与置于水箱中。
[0013]
上述的陶瓷推杆与叶片上缘板接触的一端加工成与叶片上缘板相贴合的形状。
[0014]
上述的保温箱壁上留有螺纹通孔,热电偶穿过空心螺栓,并被穿过空心螺栓侧面的螺钉压紧,空心螺栓拧紧在螺纹通孔上,热电偶穿过空心螺栓进入保温箱与陶瓷基复合材料涡轮导向叶片上温度监测点接触。
[0015]
陶瓷基复合材料涡轮导向叶片高温双轴强度试验器的实验方法,包括如下步骤:步骤1:在陶瓷基复合材料涡轮导向叶片试验件的叶盆侧均匀喷涂高温散斑;步骤2:装夹试验件,将试验件置于夹具底座与夹具盖板之间,使用高温螺栓将夹具底座与夹具盖板紧固连接;步骤3:将夹具底座与试验台架紧固连接,并在夹具底座与夹具盖板上表面均匀布置硅酸铝隔热层;步骤4:将若干个石英灯安装在石英灯罩内,调节石英灯使其尽量贴合叶身轮廓;
步骤5:在位于叶身中部、沿发动机径向某高度的截面上选取四个点为温度考核点,在叶身两端根部分别选取两个测温点,在上下缘板上分别选取三个测温点,将热电偶紧固安装在保温箱上,并调整各热电偶测温头接触到测温点;步骤6:调整dic系统透过观察窗清晰拍摄散斑区域,调整镜头曝光度并对焦,检测dic系统工作情况;步骤7:开启冷却循环系统、多通道测温仪与电动缸控制装置,通过多通道测温仪检查各个热电偶工作状况,将陶瓷推杆移动至试验件附近;步骤8:调节石英灯温度,将试验件加热至试验要求温度;步骤9:降低镜头曝光度并对焦,确保散斑区域均在镜头范围内且散斑清晰可见;步骤10:将电动缸力与位移传感器清零,调整陶瓷推杆位置,在两个方向的推杆接触到试验件后进行预紧;步骤11:电动缸采用位移控制,电动缸的加载速度根据试验件进行设置;步骤12:同时启动dic系统与电动缸,保证数据采集同时开始;步骤13:加载结束后,将电动缸复位,保存应变数据与力与位移数据,关闭dic系统、石英灯及保温箱电源、电动缸电源;步骤14:待多通道测温仪设备显示试验件降至室温后,关闭水循环系统与多通道测温仪;步骤15:将夹具从试验台架上取下,拆下夹具底座与夹具盖板之间的高温螺栓,将试验件取出;步骤16:对电动缸以及dic系统采集的数据进行处理,得到陶瓷基复合材料涡轮导向叶片试验件的力
‑
位移曲线。
[0016]
本发明具有以下优点:1、石英灯加热具有热惯性小、热效率高等优点,本发明以呈特定几何排列的石英灯组合作为热源,可保证试验件表面受热辐射均匀、整体温度梯度小,配合保温箱的使用可实现试验件的快速升温以及长时间稳定保温;2、本发明可在高温下对cmc涡轮导叶进行双向同步、异步加载以模拟叶片工作时的热载荷及气动载荷,使试验载荷环境接近实际工作状态,并且能够实时记录叶身应变场及叶片温度场,提供全面准确的实验数据;3、陶瓷推杆的端面与叶片上缘板相贴合,保证了加载时两者之间为面接触,避免推杆对加载位置造成损坏,同时也防止了试验件在加载时发生扭转,提高了试验结果的准确度。下缘板夹具的盖板上留有与叶身截面外轮廓相同的缺口,该缺口在三维建模软件中由叶身截面向外偏置成,缺口靠近叶身根部处偏置距离较小,远离叶根侧偏置距离较大,这样保证了盖板的强度,并且给叶身的位移留下空间,防止加载过程中叶身与盖板接触而影响试验数据。
附图说明
[0017]
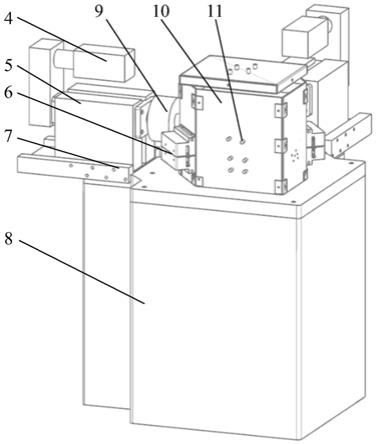
图1是本发明所用的叶片试验件示意图;图2是本发明用于固定试验件的夹具示意图;图3、图4是本发明的试验台;
图5是石英灯调节机构示意图;图6是本发明整体试验设备的组成示意图;图7为试验得到的力
‑
位移曲线图。
[0018]
图中标记名称:101
‑
叶片上缘板、102
‑
叶身、103
‑
叶片下缘板、1
‑
夹具盖板、2
‑
高温螺钉、3
‑
夹具底座、4
‑
伺服电机、5
‑
电动缸支架、6
‑
石英灯罩、7
‑
滑轨、8
‑
试验台架、9
‑
转接杆、10
‑
保温箱、11
‑
热电偶、12
‑
行星减速器、13
‑
硅酸铝保温砖、14
‑
陶瓷推杆、15
‑
石英玻璃、16
‑
石英灯罩螺母、17
‑
锁紧螺母、18
‑
石英灯、19
‑
滑块、20
‑
导轨、21水循环通路、22
‑
镜头、23
‑
电动缸电源和控制线、24
‑
水循环软管、25
‑
热电偶连接线、26
‑
多通道测温仪、27
‑
电动缸控制柜、28
‑
水箱、29
‑
水泵。
具体实施方式
[0019]
以下结合附图对本发明的实施例作进一步详细描述。
[0020]
如图3所示,保温箱10安装在试验台架8上,陶瓷基复合材料涡轮导向叶片的下缘板103固定在夹具底座3与夹具盖板1之间,将夹具置于保温箱的内部并使用高温螺钉2与试验台架紧固连接;陶瓷推杆13与叶片上缘板101接触,另一端通过转接杆9连接在电动缸行星减速器12的输出端上,电动缸通过电动缸支架5连接滑轨7,滑轨7安装在试验台架8上,电动缸可以在滑轨7上前后移动。电动缸上的力与位移传感器将采集的信号发送至电动缸控制柜27,电动缸控制柜27可驱动电动缸对叶片进行加载;热电偶11固定在保温箱10上,将采集到的叶片表面温度数据发送到多通道测温仪与多通道测温仪26中,石英灯18与多通道测温仪26连接,多通道测温仪26根据热电偶11采集的叶片表面温度数据对石英灯18功率进行调整;将数字图像相关法(digital image correlation)应变场测量系统(以下简称dic系统)的镜头22对准叶片的叶盆侧,保温箱壁留有石英玻璃窗15,镜头22将采集的图像信号发送至dic图像采集设备上;所述转接杆9以及石英灯罩6内留有水冷通道21,通过水循环软管24将各部分连接起来,水循环的一端连接水泵,另一端与置于水箱中。
[0021]
如图5所示,石英灯调节机构包括铜制滑块19与铜制导轨20。石英灯的两端均伸出至保温箱10外侧,穿过铜制滑块19,铜制滑块19安装在铜制导轨20上,滑块19可在导轨20上水平滑动。使用哈氏合金石英灯罩6将石英灯两端罩住,石英灯罩侧面留有椭圆长孔,导轨可上下移动或通过锁紧螺母17固定。滑轨内部留有水循环通道21,通道两端与水循环软管24连接。
[0022]
如图4所示,所述行星减速器输出端通过转接杆9与陶瓷推杆14连接,转接杆内部留有通孔,作为水循环通路,可以连接水循环软管24;陶瓷推杆14另一端与叶片上缘板101接触,陶瓷推杆的接触端面加工成与叶片上缘板101相贴合的形状;所述电动缸共有两台,驱动的两个陶瓷推杆加载方向垂直,分别沿叶片轴向与叶片周向同时作用于叶片上缘板。
[0023]
如图2所示,所述下缘板夹具用哈氏合金制成,分为底座和盖板两个部分;底座留有对应叶片下缘板103下表面外形的插槽。盖板分为两片,盖板下表面留有凹槽,凹槽对应叶片下缘板103上表面形状。两个盖板相合处留有缺口供叶身102穿过,缺口形状由叶身外轮廓线向外偏置得到,缺口处沿盖板厚度方向由下至上呈喇叭状。盖板与底座之间留有空隙以确保安装时压紧叶片下缘板103,底座与盖板之间靠数个高温合金高温螺钉2连接;盖板上表面均匀铺盖一层硅酸铝隔热层以减少其所受热辐射。
[0024]
利用上述装置对陶瓷基复合材料涡轮导向叶片开展试验,包括以下步骤:所述dic系统由镜头、三脚架、转接设备以及图像采集设备组成。上述保温箱一侧留有石英玻璃观察窗,镜头透过石英玻璃采集导向叶片叶盆侧的应变场数据。
[0025]
步骤1:在试验件叶片叶身102中部的叶盆侧均匀喷涂高温散斑;步骤2:装夹试验件,将试验件叶片下缘板103置于夹具底座3与夹具盖板1之间,使用高温合金螺栓高温螺钉2将夹具盖板1与夹具底座3紧固连接;步骤3:使用螺栓将夹具底座紧固安装在试验台架上的保温箱10中,并在夹具上表面均匀布置硅酸铝隔热层;步骤4:安装石英灯18,连接石英灯电源线至多通道测温仪26。调整石英灯18位置靠近叶片试验件,并且使石英灯18尽量贴合叶身102轮廓;步骤5:在位于叶身102中部、沿发动机径向某高度的截面上选取4个点为温度考核点,在叶身两端根部分别选取两个测温点,在上下缘板101、103上分别选取3个测温点。将热电偶11紧固安装在保温箱10壁上,并调整各热电偶测温头接触到测温点;步骤6:连接dic系统并开启,透过观察窗将dic镜头22对准已喷涂高温散斑的区域,调整镜头曝光度与焦距,确保散斑清晰可见;步骤7:开启水泵29、多通道测温仪26与电动缸控制柜27。通过多通道测温仪26检查各个热电偶是11否工作正常。通过电动缸控制柜将推杆14移动至试验件附近约5mm处。
[0026]
步骤8:开启多通道测温仪26,将试验件加热至试验要求温度;步骤9:降低dic镜头22曝光度,确保散斑区域均在镜头范围内且散斑清晰可见,设置dic系统的拍摄频率为1hz;步骤10:将电动缸力与位移传感器清零,调整陶瓷推杆14位置,在两个方向的推杆接触到试验件后进行预紧;步骤11:电动缸采用位移控制,电动缸的加载速度根据试验件进行设置。本试验件轴向推杆的速度设置为环向推杆速度的两倍;步骤12同时启动dic系统与电动缸,保证数据采集同时开始;步骤13:加载结束后,将电动缸推杆14复位。保存dic数据与电动缸里传感器数据,关闭dic系统、石英灯及温控箱电源26、电动缸及电动缸控制柜27;步骤14:待多通道测温仪26设备显示试验件降至室温后,关闭水泵29与多通道测温仪26;步骤15:取下石英灯18及热电偶11,拆下夹具与试验台架间的固定螺栓,将夹具从保温箱中取出。拆下夹具底座3与夹具盖板1之间的连接高温螺钉2,将试验件取出。
[0027]
步骤16:对电动缸以及dic系统采集的数据进行处理,得到力
‑
位移曲线(如图7)。
[0028]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1