基于图像识别静态线形的拉索力测量方法
1.本发明涉及桥梁拉索力测量技术领域,尤其涉及一种基于图像识别静态线 形的拉索力测量方法。
背景技术:
2.拉索是索结构桥梁的主要传力构件,索的受力状态直接反映了全桥的健康 状况。施工过程中,必须准确测量拉索张力以保证工程安全和施工控制的顺利 进行。作为结构的重要构件,拉索的损害将会给结构带来灾难性的后果。如果 拉索受到损坏,拉索力将发生变化,而变化的拉索力会直接影响结构内力分布 和线形。因此,拉索力可以作为结构健康状态评估的重要指标,在整个工程施 工和使用期限内,都必须准确地了解拉索力的状况。在实际工程中,通常使用 以下几种方法来对拉索的拉索力进行测量:一是压力表法。在桥梁施工过程中, 对拉索的张拉均使用千斤顶来完成。该方法多在桥梁施工阶段采用,但是对于 成桥拉索力,因为千斤顶的安装过程十分麻烦,并且会对锚固段产生破坏,所 以并不适用。二是压力传感器法。采用该方法对拉索力进行测量时,仍然需要 事先标定,建立传感器所受到的压力和读数之间的关系。由于传感器比较昂贵, 自身质量也较大,且若对多根索进行测量,就需要使用大量的传感器,导致成 本过高。因此该方法精度虽高,却只适用于特定场合。三是磁通量法。磁通量 法的缺点是这种测量方法的识别结果同时受到多种因素的共同影响。比如钢绞 线的规格以及所用的材料,测量时的环境温度,所处的磁场强度,以及传感器 本身的磁路结构等。四是振动法。振动法的缺点是索具有一定抗弯刚度,且在 自重作用下具有一定的垂度效应,并且索的边界条件比较复杂,不是严格意义 上的固支或铰支。因此,在利用频率法测试拉索力时,必须对索相关参数进行 设置,并根据不同的索参数选取不同的拉索力求解公式。综上所述,常用的四 种方法均存在一定问题。
3.因此,亟需一种无需专用的传感器且采用非接触式测量的拉索力测量方法。
技术实现要素:
4.有鉴于此,本发明提供一种基于图像识别静态线形的拉索力测量方法,其 特征在于,所述方法包括如下步骤:
5.s1:采集目标桥梁的拉索图像,无人机搭载图像采集设备飞至预设的图像 采集位置,远程控制所述图像采集设备实现拉索图像的采集;
6.s2:对步骤s1获得的拉索图像进行图像处理,获得拉索上边缘位置的坐标 信息;
7.s3:根据预设拉索特征点的数量在拉索上确定特征点的坐标信息;
8.s4:根据所述拉索特征点的坐标确定拉索力t;
[0009][0010]
其中,t表示拉索力,h
i
表示i索段左端的水平分力,v
i
表示i索段左端的 竖向分力;
[0011]
其中,i索段左端的水平分力h
i
和i索段左端的竖向分力采用如下方法确 定:
[0012]
h
i
=h
i
+dh
ꢀꢀꢀ
(1
‑
1)
[0013]
v
i
=h
i
+dv
ꢀꢀꢀ
(1
‑
2)
[0014]
其中,h
i
表示i索段左端的水平分力,h
i
表示i索段左端的水平分力的预 估值,dh表示i索段左端的水平分力的修正值,v
i
表示i索段左端的竖向分力, v
i
表示i索段左端的竖向分力的预估值,dv表示i索段左端的竖向分力的修正 值;
[0015]
其中,i索段左端的水平分力的预估值h
i
和i索段左端的竖向分力的预估 值v
i
采用如下方法确定:
[0016][0017][0018]
其中,l
i
表示i索段的水平投影长度,h
i
表示i索段的竖向投影长度,h
i
表示i索段左端的水平分力,v
i
表示i索段左端的竖向分力,s
i
表示索段i的 无应力长度,e表示拉索的弹性模量,a表示拉索截面积,q表示拉索的自重集 度;
[0019]
其中,i索段的水平投影长度l
i
和i索段的竖向投影长度h
i
采用如下方法 确定:
[0020]
根据特征点坐标,点1、2
…
n
‑
1、n,确定相应的各索段h
i
和l
i
;
[0021]
其中,索段的无应力长度s
i
由下式迭代计算得到:
[0022][0023]
其中,s
n
表示第n次迭代求得的索段无应力长度,s
n+1
表示第n+1次迭代求得 的索段无应力长度;
[0024]
由上述的牛顿迭代法可迭代求得索段无应力长度s0;
[0025]
其中,i索段左端的水平分力的修正值dh和i索段左端的竖向分力的修正值 dv采用如下方法确定;
[0026][0027]
其中,dh和dv表达对拉索的水平分力和竖向分力的修正值,y
m
和l
m
表示中间 点的竖向坐标和水平坐标,y
e
和l
e
表示末端点的竖向坐标和水平坐标,dy
e
和dl
e
表示末端点和中间点的标高误差。
[0028]
进一步,步骤s2还包括如下步骤:
[0029]
s21:对步骤s1获得的拉索图像进行图像处理,包括图像的标定、灰度变 换、增强、分割等预处理,得到拉索二值图像;
[0030]
s22:在二值图像基础上,利用matlab软件的图像处理功能,通过canny 边缘检测
算子对预处理后的二值图像进行边缘检测,得到图像中拉索上边缘的 像素坐标;
[0031]
s23:通过标定的像素大小,将像素坐标转化为拉索空间几何坐标,获得拉 索上边缘位置的坐标信息。
[0032]
进一步,步骤s23的的几何坐标采用如下方法确定:
[0033]
l=p*k
ꢀꢀꢀ
(1
‑
7)
[0034]
其中,l表示被测物的实际尺寸,p表示被测物的像素个数,k表示标定系数。
[0035]
进一步,所述步骤s1中预设的图像采集点为在照相机能够拍摄到整根拉索 的前提下,使图像采集设备尽量靠近拉索。
[0036]
进一步,:所述图像采集设备的分辨率需要达到工程应用的要求。
[0037]
本发明的有益技术效果:本技术提供的基于图像识别静态线形的拉索力测 量方法,其通过无人机与图像采集设备采集拉索的静态图像数据并进行处理, 得到拉索静态线形数据,获取拉索上选取点的几何参数计算拉索力,可以实现 非接触式测量,无需安装传感器,不影响桥梁结构及交通,操作简单、成本低、 同时也可实现对多跟拉索的同时测量,效率高。
附图说明
[0038]
下面结合附图和实施例对本发明作进一步描述:
[0039]
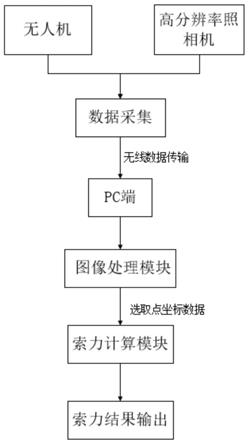
图1为本发明的原理图。
[0040]
图2为索力计算模块拉索计算示意图。
具体实施方式
[0041]
以下结合说明书附图对本发明做出进一步的说明:
[0042]
本发明提供一种基于图像识别静态线形的拉索力测量方法,其特征在于, 如图1所示,所述方法包括如下步骤:
[0043]
s1:采集目标桥梁的拉索图像,无人机搭载图像采集设备飞至预设的图像 采集位置,远程控制所述图像采集设备实现拉索图像的采集;
[0044]
s2:对步骤s1获得的拉索图像进行图像处理,获得拉索上边缘位置的坐标 信息;
[0045]
s3:根据预设拉索特征点的数量在拉索上确定特征点的坐标信息;
[0046]
s4:根据所述拉索特征点的坐标确定拉索力t;
[0047][0048]
其中,t表示拉索力,h
i
表示i索段左端的水平分力,v
i
表示i索段左端的 竖向分力;
[0049]
其中,i索段左端的水平分力h
i
和i索段左端的竖向分力采用如下方法确 定:
[0050]
h
i
=h
i
+dh
ꢀꢀꢀ
(1
‑
1)
[0051]
v
i
=h
i
+dv
ꢀꢀꢀ
(1
‑
2)
[0052]
其中,h
i
表示i索段左端的水平分力,h
i
表示i索段左端的水平分力的预 估值,dh表示i索段左端的水平分力的修正值,v
i
表示i索段左端的竖向分力, v
i
表示i索段左端的竖向分力的预估值,dv表示i索段左端的竖向分力的修正 值;
[0053]
其中,i索段左端的水平分力的预估值h
i
和i索段左端的竖向分力的预估 值v
i
采用
如下方法确定:
[0054][0055][0056]
其中,l
i
表示i索段的水平投影长度,h
i
表示i索段的竖向投影长度,h
i
表示i索段左端的水平分力,v
i
表示i索段左端的竖向分力,s
i
表示索段i的 无应力长度,e表示拉索的弹性模量,a表示拉索截面积,q表示拉索的自重集 度;
[0057]
其中,i索段的水平投影长度l
i
和i索段的竖向投影长度h
i
采用如下方法 确定:
[0058]
根据特征点坐标,点1、2
…
n
‑
1、n,确定相应的各索段h
i
和l
i
;如图2所 示,采用是三角函数换算获得水平投影长度和竖向投影长度。
[0059]
其中,索段的无应力长度s
i
由下式迭代计算得到:
[0060][0061]
其中,s
n
表示第n次迭代求得的索段无应力长度,s
n+1
表示第n+1次迭代求得 的索段无应力长度;
[0062]
由上述的牛顿迭代法可迭代求得索段无应力长度s0;
[0063]
其中,i索段左端的水平分力的修正值dh和i索段左端的竖向分力的修正值 dv采用如下方法确定;
[0064][0065]
其中,dh和dv表达对拉索的水平分力和竖向分力的修正值,y
m
和l
m
表示中间 点的竖向坐标和水平坐标,y
e
和l
e
表示末端点的竖向坐标和水平坐标,dy
e
和dl
e
表示末端点和中间点的标高误差。上述方案,通过无人机与图像采集设备采集 拉索的静态图像数据并进行处理,得到拉索静态线形数据,获取拉索上选取点 的几何参数计算拉索力,可以实现非接触式测量,无需安装传感器,不影响桥 梁结构及交通,操作简单、成本低、同时也可实现对多跟拉索的同时测量,效 率高。
[0066]
步骤s2还包括如下步骤:
[0067]
s21:对步骤s1获得的拉索图像进行图像处理,包括图像的标定、灰度变 换、增强、分割等预处理,得到拉索二值图像;
[0068]
s22:在二值图像基础上,利用matlab软件的图像处理功能,通过canny 边缘检测算子对预处理后的二值图像进行边缘检测,得到图像中拉索上边缘的 像素坐标;
[0069]
s23:通过标定的像素大小,将像素坐标转化为拉索空间几何坐标,获得拉 索上边
缘位置的坐标信息。
[0070]
步骤s23的的几何坐标采用如下方法确定:
[0071]
l=p*k
ꢀꢀꢀ
(1
‑
7)
[0072]
其中,l表示被测物的实际尺寸,p表示被测物的像素个数,k表示标定系数。
[0073]
所述步骤s1中预设的图像采集点为在照相机能够拍摄到整根拉索的前提 下,使图像采集设备尽量靠近拉索。
[0074]
所述图像采集设备的分辨率需要达到工程应用的要求。
[0075]
本发明的目的是提供一种拉索力测量方法,通过图像采集设备获取拉索图 像数据,采用相关软件处理、获取拉索线形数据,基于选取的拉索控制点的几 何坐标,计算拉索力。
[0076]
为实现上述目的,本发明通过以下技术手段:
[0077]
1)通过人工遥控将具备图像采集功能的无人机飞至合适的位置;
[0078]
2)通过图像采集设备实现拉索图像的采集;
[0079]
3)将图像采集的数据实时传送到pc端;
[0080]
4)将采集的图像数据在pc端通过软件进行图像处理,获得拉索静态线 形数据;
[0081]
5)在提取的拉索静态线形上选取特征点的坐标数据计算拉索力。
[0082]
具体步骤如下:
[0083]
步骤1)选用配备图像采集功能的无人机,无人机可通过人工遥控的方式 运载照相机至合适的位置,即通过遥控无人机飞行的高度和距离,使照相机的 时域刚好可以拍摄到整根拉索,可以同时采集多根拉索的图像数据,也可使用 多个无人机设备实现对多跟拉索数据的同时采集。
[0084]
步骤2)目前照相机的分辨率越来越高,相应的图像拍摄的精度越来越高, 甚至已经达到工程应用的要求。照相机快门方式为电子快门,可进行远程操控, 避免接触振动误差,配备大容量存储器,可以实现长时间的拍摄监测,以达到 对拉索力状态的持续监控。
[0085]
步骤3)中高分辨率照相机配备大容量存储器,可以在拍摄完成后人工操 纵无人机返回并人工读取照相机存储器中的拉索图像数据文件,也可以通过网 络实现图像数据的实时传输。
[0086]
步骤4)通过获得的拉索静态线形数据在pc端进行图像处理,对数字拉索 图像进行灰度变换、增强、分割,改善图像质量,突出图像中的拉索位置,然 后通过canny算子对图像进行边缘检测。边缘检测算子就是通过对图像进行微 分运算,在灰度变化较为剧烈的边缘区域可以得到较大的值,而非边缘区域的 计算值很小,以此来检测图像边缘。
[0087]
在获得拉索边缘图像后,就可以读取拉索上边缘的像素坐标,并转化为几 何空间坐标,就可以获得拉索静态线形数据,并提取拉索线形上某几个点的位 置坐标进行下一步的拉索力计算。
[0088]
步骤5)根据拉索静态线形上选取点的坐标,采用本发明提出的算法计算 拉索力。
[0089]
本发明的测量方法,包括无人机一台、电脑一台,同时无需任何其他设备, 无人机可远程操控采集拉索图像并实时传输图像数据。
[0090]
相较于传统的测量方法,本发明的方法的优点是:可以实现非接触式测量, 无需安装传感器等设备,不影响桥梁结构及交通,设备简单,由于仅需要静态 的拉索线形,因此
数据采集时间短,同时也可实现对多跟拉索的同时测量,具 备极高的效率。
[0091]
下面对本发明做进一步的详细描述,但本发明不仅局限于如下实例:
[0092]
(1)拉索静态图像采集。使用配备图像采集功能的无人机采集拉索静态线 形图像,无人机搭载的相机系统应尽量采用高分辨率相机以保证测量的精度。
[0093]
数字图像由像素点构成,图像的像素越高,其测量的精度也越高。目前照 相机的分辨率越来越高,相应的图像拍摄的精度越来越高,已经达到工程应用 的要求。但是像素数量并不代表实际构建的尺寸大小,而是由方法倍数决定, 一旦图像采集设备的位置固定,其像素与实际构建的大小尺寸就确定了,继而 就可以由图像来得到构件的实际尺寸或者求得两点间的水平和竖向的距离。其 换算公式如下所示:
[0094]
l=p*k
ꢀꢀꢀ
(1
‑
7)
[0095]
其中,l表示被测物的实际尺寸p,表示被测物的像素个数,k表示标定系 数。
[0096]
照相机的像素是已经确定的,为达到更高的精度,需要在在照相机能够拍 摄到整根拉索的前提下,尽量使图像采集设备尽量靠近拉索。因此采用无人机 采集图像的方式,无人机可由人工操控,没有了地形的限制,可使无人机的位 置能够尽量的靠近拉索,可随意调整照相机的位置,达到尽可能高的精度。
[0097]
(2)数字图像处理。图像处理模块可分为图像预处理、图像边缘检测、拉 索特征点坐标提取等主要环节。其中图像预处理主要是为了提高图像质量,图 像的预处理主要包括图像的灰度变换,图像增强、分割等操作,经过图像的预 处理,可以更好的对图像中拉索边缘进行检测。图像边缘检测是提取图像边缘 特征的重要环节,通过边缘检测可以获得拉索的边缘点像素坐标信息,根据相 机的标定获得像素大小,从而转化为拉索的世界坐标,再通过建立二维x、y 坐标系,得到每个索段的水平投影长度和竖向投影长度。
[0098]
(3)拉索力计算模块。通过图像处理获得的拉索选取点的水平与竖向距离, 再基于索的特定计算方法,采用某几个点进行拉索力计算,另外几个点进行误 差修正,可以计算得到拉索力。
[0099]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管 参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解, 可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的 宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1