一种基于信号到达时间差的多站无源定位方法
1.本发明涉及信号处理技术领域,具体是涉及一种基于信号到达时间差的多站无源定位方法。
背景技术:
2.利用信号接收站被动接收电磁辐射信号来确定雷达、通信设备等电磁辐射源的位置,称之为无源定位技术。现有各种无源定位体制,从使用量测的角度大致可分为利用空域量测信息、频域量测、多普勒频率、辐射源信号的到达时间以及到达时间差等参数。相比测向定位体制和基于频域量测的定位体制,基于信号到达时间差的测时定位体制,不仅定位精度高,对运动平台的姿态测量要求低且对信号调制的适应能力强,可最大限度地降低组网平台中单一节点的载荷需求,是无源定位系统小型化、网络化的首选定位体制之一。
3.基于信号到达时间差的无源定位体制中,获得时延参数后,可以进而根据时间差信息乘以电磁波传播速度,得到距离差信息,从而建立包含目标辐射源位置的定位方程,通过求解定位方程的最优解来实现对目标的定位。在二维空间中,每一个到达时间差量测信息都能对应一个双曲线,当有三个及三个以上接收站时,就能得到多个到达时间差量测信息,进而由多个双曲线的交点或者根据双曲线获得的估计点就是目标辐射源的位置,通常采用的求解算法包括迭代法,解析法和极值搜索方法。
4.由于根据信号到达时间差得到的定位方程是关于目标速度、位置等状态参数的非线性方程,给求解带来了一定的难度。通常采用的求解算法各有优劣:迭代的方法虽然计算量小但通常估计精度不高;解析方法噪声门限高、容易陷入局部最优解;极值搜索方法虽然精度较高但计算量较大,并且当待估计参数较多时,其求解效率将不可避免地下降。研究计算量小、精度高的无源定位方法具有十分重要的意义。
技术实现要素:
5.本发明所要解决的技术问题是,克服上述背景技术的不足,提供一种基于信号到达时间差的多站无源定位方法,限制搜寻区域,可提高定位效率,降低迭代次数,减小计算复杂度。
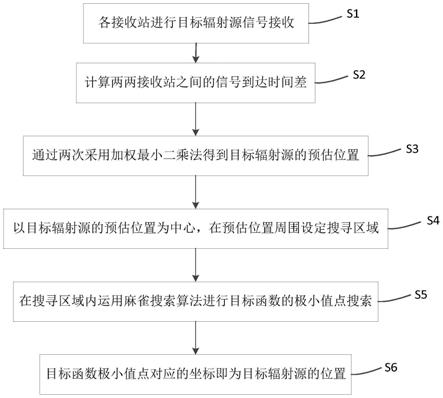
6.本发明解决其技术问题采用的技术方案是,一种基于信号到达时间差的多站无源定位方法,包括以下步骤:
7.s1:目标辐射源信号接收:各接收站进行目标辐射源信号接收;
8.s2:信号到达时间差计算:计算两两接收站之间的信号到达时间差;
9.s3:目标辐射源预估位置计算:通过两次采用加权最小二乘法得到目标辐射源的预估位置;
10.s4:搜寻区域设定:以目标辐射源的预估位置为中心,在预估位置周围设定搜寻区域;
11.s5:目标函数极值搜索:在搜寻区域内进行目标函数的极小值点搜索;
12.s6:目标辐射源位置确定:目标函数极小值点对应的坐标即为目标辐射源的位置。
13.进一步,所述步骤s1中,设定共有m个接收站在半径为r的圆形区域内参与对目标的无源定位;各个接收站的位置坐标分别为s
i
=(x
i
,y
i
)
t
,i∈{1,2,...,m},其中[
·
]
t
表示矩阵转置,目标p的真实位置坐标为p=(x,y)
t
。
[0014]
进一步,所述步骤s2中,取第一个接收站bs1为参考接收站,测得目标发出的电磁信号到达接收站bs
i
的时刻为t
i
,测得目标发出的电磁信号到达参考接收站bs1的时刻为t1,计算目标发出的电磁信号到达参考接收站bs1与到达接收站bs
i
的时间差|t1‑
t
i
|。
[0015]
进一步,所述步骤s3中,通过两次采用加权最小二乘法得到目标辐射源的预估位置,具体包括以下步骤:
[0016]
s31:根据目标发出的电磁信号到达参考接收站bs1与到达接收站bs
i
的时间差,计算参考接收站bs1与接收站bs
i
的距离差为r
i,1
,信号的传播速度为c;假设噪声n
i
服从高斯分布建立基于信号到达时间差的参数方程组
[0017]
r
i,1
=c|t1‑
t
i
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0018]
r
i,1
=d
i,1
+n
i,1
,i∈{2,...,n}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0019]
因此,
[0020]
c|t1‑
t
i
|=d
i,1
+n
i,1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0021]
其中,
[0022]
d
i,1
=d
i
‑
d1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0023][0024][0025]
其中,d1表示目标p到参考接收站bs1的理论距离,d
i
表示目标p到接收站bs
i
的理论距离,d
i,1
表示目标p到接收站bs
i
与到接收站bs1的理论距离差,n
i,1
表示距离差的噪声;
[0026]
s32:根据基于信号到达时间差的参数方程组计算系数矩阵h,第一次采用加权最小二乘法得到目标辐射源的粗略估计位置具体为:
[0027]
根据信号到达时间差的参数方程组得到式(7):
[0028][0029]
其中,x
i,1
=x
i
‑
x1,y
i,1
=y
i
‑
y1;
[0030]
令其中设定目标的位置为
[0031]
式(7)改写为:
[0032]
h=g
a
z
a
ꢀꢀꢀꢀ
(8)
[0033]
其中,h和g
a
的定义如下:
[0034]
[0035][0036]
其中,m为接收站个数;
[0037]
当噪声为0时,z
a
记为定义误差矢量ε如下:
[0038][0039]
假设x,y和d1不相关,则使用加权最小二乘法有
[0040][0041]
其中,ψ是ε的协方差矩阵,由于被定义为从而计算得到即可得到第一次采用加权最小二乘法后的目标辐射源的粗略估计位置
[0042]
s33:优化系数矩阵h,对系数矩阵h进行更新,得到新的系数矩阵第二次采用加权最小二乘法,得到目标辐射源的预估位置具体为:
[0043]
定义新的误差矢量为:
[0044][0045]
其中,的定义如下:
[0046][0047][0048][0049]
其中,为结果矩阵的第1个元素的有偏估计,为结果矩阵的第2个元素的有偏估计,为结果矩阵的第3个元素d1的有偏估计;e1为的估计误差,e2为的估计误差,e3为d1的估计误差;
[0050]
第二次采用加权最小二乘法,得到:
[0051][0052]
其中,是的协方差矩阵,则由上式即得到目标辐射源的预估位置
[0053]
进一步,所述步s4中,搜寻区域为以为圆心,r为半径的圆形区域,其中则搜寻区域表示为:
[0054][0055]
进一步,所述步骤s5中,在搜寻区域内运用麻雀搜索算法进行目标函数的极小值点搜索。
[0056]
进一步,所述步骤s5中,在搜寻区域内进行目标函数的极小值点搜索时,将目标函数定义为目标辐射源到不同接收站的距离差的测量值与理论值的残差平方和函数j
nls
(x
δ
),表达式为:
[0057][0058]
其中,x
δ
表示优化变量,m表示接收站数目,残差z
i
(x
δ
)表示为:
[0059]
z
i
(x
δ
)=d
i,1
‑
r
i,1
。
[0060]
与现有技术相比,本发明的优点如下:
[0061]
本发明基于信号到达时间差的多站无源定位方法,首先利用两次加权最小二乘法得到目标位置的预估值,进而为下一步的极值搜索方法限制搜寻区域,从而避免在全局进行极值搜索,可提高定位效率,降低迭代次数,减小计算复杂度。此外,本发明方法在进行极值搜索时采用麻雀搜索算法进行计算,搜索效率和定位精度更高。
附图说明
[0062]
图1是本发明实施例的方法流程示意图。
[0063]
图2是图1所示实施例基于信号到达时间差的原理示意图
[0064]
图3是图1所示实施例与其他方法在不同信噪比情况下的均方误差图。
[0065]
图4是采用图1所示实施例对目标轨迹进行跟踪的结果图。
[0066]
图5是采用遗传寻优算法对目标轨迹进行跟踪的结果图。
具体实施方式
[0067]
下面结合附图及具体实施例对本发明作进一步详细描述。
[0068]
参照图1,本实施例一种基于信号到达时间差的多站无源定位方法,包括以下步骤:
[0069]
s1:目标辐射源信号接收:各接收站进行目标辐射源信号接收;
[0070]
s2:信号到达时间差计算:计算两两接收站之间的信号到达时间差;
[0071]
s3:目标辐射源预估位置计算:通过两次采用加权最小二乘法得到目标辐射源的预估位置;
[0072]
s4:搜寻区域设定:以目标辐射源的预估位置为中心,在预估位置周围设定搜寻区域;
[0073]
s5:目标函数极值搜索:在搜寻区域内运用麻雀搜索算法进行目标函数的极小值点搜索;
[0074]
s6:目标辐射源位置确定:目标函数极小值点对应的坐标即为目标辐射源的位置。
[0075]
参照图2,本实施例在二维平面内进行本发明的具体应用,步骤s1中,设定共有m(m≥3)个接收站在半径为r的圆形区域内参与对目标的无源定位,各个接收站的位置坐标分别为s
i
=(x
i
,y
i
)
t
,i∈{1,2,...,m},其中[
·
]
t
表示矩阵转置,目标p的真实位置坐标为p=(x,y)
t
。本实施例中将参与定位的接收站数目m设置为4。
[0076]
步骤s2中,取第一个接收站bs1为参考接收站,不考虑非视距传播的影响,假设信号在目标p与各个接收站bs
i
之间是按照直线传播的,测得目标发出的电磁信号到达接收站bs
i
的时刻为t
i
,测得目标发出的电磁信号到达参考接收站bs1的时刻为t1,计算目标发出的电磁信号到达参考接收站bs1与到达接收站bs
i
的时间差|t1‑
t
i
|。
[0077]
步骤s3中,通过两次采用加权最小二乘法得到目标辐射源的预估位置,具体包括以下步骤:
[0078]
s31:根据目标发出的电磁信号到达参考接收站bs1与到达接收站bs
i
的时间差|t1‑
t
i
|,计算参考接收站bs1与接收站bs
i
的距离差为r
i,1
,信号的传播速度为c;假设噪声n
i
服从高斯分布建立基于信号到达时间差的参数方程组
[0079]
r
i,1
=c|t1‑
t
i
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0080]
r
i,1
=d
i,1
+n
i,1
,i∈{2,...,n}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0081]
因此,
[0082]
c|t1‑
t
i
|=d
i,1
+n
i,1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0083]
其中,
[0084]
d
i,1
=d
i
‑
d1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0085][0086][0087]
其中,d1表示目标p到参考接收站bs1的理论距离,d
i
表示目标p到接收站bs
i
的理论距离,d
i,1
表示目标p到接收站bs
i
与到接收站bs1的理论距离差,n
i,1
表示距离差的噪声。
[0088]
s32:根据基于信号到达时间差的参数方程组计算系数矩阵h,第一次采用加权最小二乘法得到目标辐射源的粗略估计位置具体为:
[0089]
根据信号到达时间差的参数方程组得到式(7):
[0090][0091]
其中,x
i,1
=x
i
‑
x1,y
i,1
=y
i
‑
y1;
[0092]
令其中设定目标的位置为
[0093]
式(7)改写为:
[0094]
h=g
a
z
a
ꢀꢀꢀꢀ
(8)
[0095]
其中,h和g
a
的定义如下:
[0096][0097][0098]
其中,m为接收站个数;
[0099]
当噪声为0时,z
a
记为定义误差矢量ε如下:
[0100][0101]
假设x,y和d1不相关,则使用加权最小二乘法有
[0102][0103]
其中,ψ是ε的协方差矩阵,由于被定义为从而计算得到即可得到第一次采用加权最小二乘法后的目标辐射源的粗略估计位置
[0104]
s33:优化系数矩阵h,对系数矩阵h进行更新,得到新的系数矩阵第二次采用加权最小二乘法,得到目标辐射源的预估位置具体为:
[0105]
定义新的误差矢量为:
[0106][0107]
其中,的定义如下:
[0108][0109][0110][0111]
其中,为结果矩阵的第1个元素的有偏估计,为结果矩阵的第2个元素的有偏估计,为结果矩阵的第3个元素d1的有偏估计;e1为的估计误差,e2为的估计误差,e3为d1的估计误差。
[0112]
第二次采用加权最小二乘法,得到:
[0113][0114]
其中,是的协方差矩阵,则由上式即得到目标辐射源的预估位置
[0115]
本实施中两次采用加权最小二乘法对目标辐射源的位置进行精估计,可提高目标辐射源预估位置的预估精度。
[0116]
步骤s4中,得到目标辐射源的预估位置后,在预估位置周围为下一步的目标函数极值搜索设定搜寻区域。本实施例中,缩小搜寻区域为以为圆心,r为半径的圆形区域,其中则缩小后的搜寻区域表示为:
[0117][0118]
即采用两次加权最小二乘法为下一步的目标函数极值搜索设定的搜寻区域为一个圆形区域,圆心为半径为r。
[0119]
步骤s5中,在搜寻区域内运用麻雀搜索算法进行目标函数的极小值点搜索时,将目标函数定义为目标辐射源到不同接收站的距离差的测量值与理论值的残差平方和函数j
nls
(x
δ
),表达式为
[0120][0121]
其中,x
δ
表示优化变量,m表示接收站数目,残差z
i
(x
δ
)表示为:
[0122]
z
i
(x
δ
)=d
i,1
‑
r
i,1
。
[0123]
本实施例中仿真参数设置如下:四个接收站的位置坐标分别为bs1(0,0),bs2(0,10),bs3(10,10),bs4(10,0),坐标单位为米(m),其中bs1为参考接收站。本实施例对坐标(5,5)为圆心,半径r为10的搜索范围进行目标定位。本实施例中,在通过两次加权最小二乘方法得到目标的预估位置后,缩小后的搜索范围半径r为2.5。本实施例中的信噪比(snr)的定义如下:其中,σ
i
表示噪声的标准偏差。
[0124]
为了验证本发明具有较好的定位精度,本实施例进行仿真分析。图3为采用本发明方法及约束加权最小二乘法和遗传寻优算法在不同信噪比情况下的均方误差(rmse)图,具体为利用三种方法对目标(2,3)进行定位时的结果均方误差随信噪比的增加的变化图。由图3可以看出,本发明的rmse值要低于约束加权最小二乘法和遗传寻优算法的rmse值,表明本发明的性能要优于约束加权最小二乘法和遗传寻优算法,定位精度更高。如图4所示为采用本发明方法对目标轨迹进行跟踪的结果图,图5为采用遗传寻优算法对目标轨迹进行跟踪的结果图,可以发现,相比较于遗传寻优算法,本发明跟踪效果更好,偏离实际路径的点较少,精度更高。
[0125]
为了验证本发明在提高计算效率方面的优越性,本实施例中将本发明(加搜寻区域限制)和未加搜寻区域限制的寻优算法得到的定位结果均方误差之间进行比较,其中snr=30db,当rmse优于0.03739m时,本发明仅需要迭代30次,而未加区域限制的寻优算法本身需要100次。仿真结果证明了本发明有效性,在一定条件下,可以减少迭代次数。
[0126]
表1 本发明和未加搜寻区域限制在不同迭代次数的寻优算法的均方根误差
[0127][0128]
本发明基于信号到达时间差的多站无源定位方法,首先利用两次加权最小二乘法得到目标位置的预估值,进而为下一步的极值搜索方法限制搜寻区域,从而避免在全局进行极值搜索,可提高定位效率,降低迭代次数,减小计算复杂度。此外,本发明方法在进行极值搜索时采用麻雀搜索算法进行计算,搜索效率和定位精度更高。
[0129]
本领域的技术人员可以对本发明进行各种修改和变型,倘若这些修改和变型在本发明权利要求及其等同技术的范围之内,则这些修改和变型也在本发明的保护范围之内。
[0130]
说明书中未详细描述的内容为本领域技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1