一种耐辐照的水下变形视觉测量单元及测量方法
1.本发明涉及核电站燃料组件变形测量领域,具体地,涉及的是一种基于双光刀线激光三角测量原理的非接触式视觉测量单元及测量方法。
背景技术:
2.燃料组件由控制棒、上管座、上格架、导向管、燃料棒、中间格架、下格架、下管座以及其他组件构成,是核能系统产生能量的核心部件,它长期工作在高温、高压、高辐射的循环水中,受装配应力和热应力等诸多因素的影响,容易发生弯曲变形、扭曲变形等,变形严重时更会影响到燃料棒的正常插入,危及反应堆的安全运行。
3.为了保障核能开发过程中的安全,核电站需要定期对堆芯内的燃料组件及其它部件进行检修作业,通过检测结果来评定变形是否处于安全范围内,从而提醒工作人员及时地更换燃料组件。由于燃料组件长期工作于辐射环境中,对它采用接触式测量方式会受到极大的限制,这就迫切需求燃料组件的非接触式检测技术。
4.国外方面,瑞典mabema公司基于单光刀线激光三角测量原理研发设计的视觉测量单元,主要包括工业相机、镜头、激光器、外壳等。测量系统采用模块化设计理念,8组视觉测量单元安装在管道对齐,当悬挂燃料组件和测量系统后,该系统大概在3秒内测量燃料组件,然后转动90度三次,完成燃料组件四面测量的总时间约40秒,整体精度优于0.5mm,但该测量单元测量精度较低,测量效率有待提高。
5.国内方面,中国科学院光电技术研究所设计的双目耐辐照相机模块,主要包括耐辐照镜头、传感器、控制传输单元和机械主体四部分,所有部件通过铝合金外壳实现密封,基于图像域算法处理来计算燃料组件变形状态,但基于双目视觉的水下相机模块,对相机标定要求更高,极线几何约束不再准确,测量距离较近,测量精度较低。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种耐辐照的水下变形视觉测量单元及测量方法,具备一定抗辐照性能和深水防水效果,能够进行燃料组件深水、辐照环境下的瞬态非接触式变形测量,帮助核电站定期对堆芯内的燃料组件及其它部件进行检修作业,辅助筛选判断燃料组件的安全风险程度。
7.本发明的第一方面,提供一种耐辐照的水下变形视觉测量单元,包括:
8.激光模块,该模块发射两道激光条纹,且外侧通过钨合金屏蔽层进行核辐射屏蔽;
9.图像采集模块,该模块采集标定板图像和所述激光模块的激光条纹图像,用于进行相机标定和光平面标定,且所述图像采集模块的外侧通过钨合金屏蔽层进行核辐射屏蔽;所述图像采集模块和激光模块的数据线集成后通过水密接插件与外部控制器相连;
10.反射部件,该部件用于反射所述激光模块的激光条纹和所述图像采集模块的相机视场,从而保证测量单元的有效工作距离;
11.底座,用于安装固定所述图像采集模块、所述激光模块和所述反射部件;
12.外壳,与所述底座配合连接形成密封空间,所述图像采集模块、所述激光模块以及所述反射部件位于该密封空间中,其中两个所述反射部件位于该密封空间的两端部附近,所述图像采集模块和所述激光模块位于两个所述反射部件之间。
13.优选的,所述图像采集模块附近的反射部件与底座夹角75
°
,所述激光模块附近的反射部件与底座夹角45
°
。
14.优选的,所述图像采集模块采用工业相机,所述工业相机上安装镜头和滤光片,所述工业相机安装于相机支撑架上;所述工业相机、镜头以及滤光片的外侧通过钨合金屏蔽层进行核辐射屏蔽。
15.优选的,所述激光模块包括两个激光器,所述激光器安装在激光器固定块上,所述激光器固定块固定于激光器支撑架上,所述激光器和激光器固定块的外侧通过钨合金屏蔽层进行核辐射屏蔽;一个所述工业相机和两个所述激光器构成双光刀线激光三角测量。
16.优选的,所述反射部件采用镀银反射镜,两个镀银反射镜分别固定于所述相机支撑架和所述激光器支撑架上,所述相机支撑架与底座夹角75
°
,所述激光器支撑架与底座夹角45
°
,用以保证所述工业相机、所述激光器的有效工作距离。
17.优选的,所述的耐辐照的水下变形视觉测量单元还包括:密封部件,所述密封部件位于所述底座和所述外壳之间,用于保证两者的密封连接。
18.优选的,所述的耐辐照的水下变形视觉测量单元,还包括:铅玻璃,所述铅玻璃嵌于视觉测量单元外壳,通过铅玻璃固定架压紧。
19.本发明的第二方面,提供一种燃料组件格架或底座的测量方法,采用上述的耐辐照的水下变形视觉测量单元实现,包括:
20.多组视觉测量单元的激光模块同时发射激光条纹,经反射部件反射后,投射至燃料组件格架或底座;
21.多组视觉测量单元的图像采集模块同时通过反射部件反射,捕捉获取激光条纹图像;
22.对捕捉的所述激光条纹图像进行图像分割和光心提取,得到上、下激光条纹中心;
23.基于水下多介质折射模型和上、下光平面方程进行三维重建,获取燃料组件格架或底座的三维点云数据,用于后续的弯扭变形计算,实现燃料组件格架或底座的测量。
24.与现有技术相比,本发明实施例具有如下至少一种有益效果:
25.本发明上述提供的测量单元和测量方法,采用反射部件、两个激光器、工业相机配合,得益于反射式结构设计安装和双光刀线激光三角测量原理,能够实现测量距离远,测量精度高,测量速度快。
26.本发明上述提供的测量单元和测量方法,具备一定抗辐照性能和深水防水效果,可用于燃料组件深水、辐照环境下的瞬态非接触式变形测量。
27.本发明上述提供的测量单元和测量方法,可以帮助核电站定期对堆芯内的燃料组件及其它部件进行检修作业,辅助筛选判断燃料组件的安全风险程度。
附图说明
28.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
29.图1是本发明一较优实施例中水下变形视觉测量单元的结构示意图;
30.图2是本发明一较优实施例中水下变形视觉测量单元的钨合金屏蔽层示意图;
31.图3是本发明一较优实施例中水下变形视觉测量单元的结构正视图;
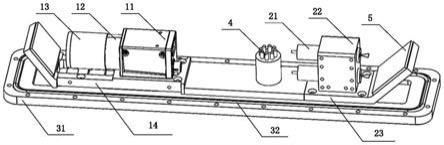
32.图4是本发明一较优实施例中水下变形视觉测量单元的结构俯视图;
33.图中:11为工业相机、12为镜头、13为滤光片、14为相机支撑架、21为激光器、22为激光器固定块、23为激光器支撑架、31为底座、32为机械密封圈、4为水密接插件、5为反射镜、61为外壳、62为铅玻璃、63为铅玻璃固定架、7为钨合金屏蔽层。
具体实施方式
34.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
35.如图1~图4所示,为本发明实施例的耐辐照的水下变形视觉测量单元,具体的,包括:图像采集模块、激光模块、反射部件、底座以及外壳,其中:激光模块发射两道激光条纹,且外侧通过钨合金屏蔽层7进行核辐射屏蔽;图像采集模块采集标定板图像和激光模块发出的激光条纹图像,经数据线传输至计算机进行相机标定和光平面标定,且外侧通过钨合金屏蔽层7进行核辐射屏蔽;图像采集模块和激光模块的数据线集成后通过水密接插件4与外部控制器相连;反射部件反射激光模块的激光条纹和图像采集模块的相机视场,从而保证测量单元的有效工作距离;较好的,图像采集模块附近的反射部件与底座31的夹角75
°
,激光模块附近的反射部件与底座31的夹角45
°
;底座31用于安装固定图像采集模块、激光模块和反射部件;外壳61与底座31配合连接形成密封空间,图像采集模块、激光模块以及反射部件位于该密封空间中,其中两个反射部件位于该密封空间的两端部附近,图像采集模块和激光模块位于两个反射部件之间。
36.本发明上述实施例的视觉测量单元,测量单元采用双光刀线激光三角测量原理,内部集成1个工业相机11和2个激光器21,具备一定抗辐照性能和深水防水效果,可用于燃料组件深水、辐照环境下的瞬态非接触式变形测量。
37.在本实施例中,图像采集模块采用工业相机11,工业相机11上安装镜头12和滤光片13,工业相机11安装于相机支撑架14上;工业相机11、镜头12以及滤光片13安装后构成一整体,在该整体的外周设置钨合金屏蔽层7,将该整体包裹在里面,进行核辐射屏蔽。
38.参照图1和图2所示,在本实施例中,激光模块包括两个激光器21,两个激光器21安装在激光器固定块22上,激光器固定块22固定于激光器支撑架23上,激光器21和激光器固定块22安装后构成一整体,在该整体的外周设置钨合金屏蔽层7,将该整体包裹在里面,进行核辐射屏蔽;一个工业相机11和两个激光器21构成双光刀线激光三角测量。在一具体的实施例中,工业相机11安装镜头12和滤光片13后,通过螺钉连接固定于相机支撑架14,外侧通过定制的钨合金屏蔽层7进行核辐射屏蔽;2个激光器21通过螺钉连接安装在激光器固定块22,激光器固定块22通过螺钉连接固定于激光器支撑架23,外侧通过钨合金屏蔽层7进行核辐射屏蔽;工业相机11和激光器21的数据线集成后通过水密接插件4与外部控制器相连。进一步的,相机支撑架14和激光器支撑架23固定于底座31,反射部件采用两块镀银反射镜
5,2块镀银反射镜5分别固定于相机支撑架14和激光器支撑架23上。
39.参照图3和图4所示,在一优选实施例中,视觉测量单元还包括:铅玻璃62和铅玻璃固定架63,2块铅玻璃62嵌于视觉测量单元外壳61,并通过铅玻璃固定架63压紧,在保证工业相机、激光器密封透光的同时,具备一定程度的抗辐射性能。
40.为了更好实现密封效果,在一实施例中,底座31挖槽,槽内放入机械密封圈32,通过机械密封圈32进行物理密封,底座31和外壳61通过螺钉连接紧固,从而保证密封效果。具体的,外壳61和底座31采用电解抛光工艺处理的耐腐蚀不锈钢材质,可有效减少污染物滞留。
41.在部分实施例中,工业相机11采用basler的aca1920
‑
48gm面阵相机型号,分辨率230万像素,像素尺寸4.8μm,帧率50fps,镜头12采用ricoh的fl
‑
cc1614
‑
2m定焦镜头型号,焦距16mm。激光器21采用650nm波长150mw功率的红色激光。当然在其他实施例中,也可以采用其他型号的工业相机、激光器。
42.在部分实施例中,2块厚度为5mm的铅玻璃62嵌于视觉测量单元外壳61,并通过铅玻璃固定架63压紧。当然在其他实施例中,也可以采用其他厚度的铅玻璃。
43.在部分实施例中,2块厚度为2mm的镀银反射镜5分别固定于相机支撑架14和激光器支撑架23,用以发射激光器21发射的激光条纹,保证工业相机11的工作视场。当然在其他实施例中,也可以采用其他厚度的镀银反射镜。
44.本发明上述实施例中的视觉测量单元的水下工作距离可以为900
±
100mm,测量距离远,测量精度高,测量速度快。
45.本发明上述实施例通过钨合金屏蔽层7隔离工业相机11和激光器21,通过反射式结构设计安装工业相机11和激光器21,激光器21发射激光条纹,经反射镜5反射后,透过铅玻璃62,投射至标定板,后工业相机11通过反射镜5反射,透过铅玻璃62,捕捉获取激光条纹图像,进行后续计算机处理。该视觉测量单元可以在保证电子元器件工作视场的同时,减弱核辐射对其的损耗。
46.本发明上述实施例通过机械密封圈32进行物理密封,采用深层防水的水密接插件4连接外部控制器,该视觉测量单元可以满足一定时长的深水防水效果。
47.在另一实施例中,本发明采用上述实施例中的视觉测量单元来进行对燃料组件格架或底座进行测量。其中,测量前时,将视觉测量单元通过卡箍连接块安装到不锈钢连接管,集成多组视觉测量单元,在水下工作距离范围内,对燃料组件格架或底座进行测量。具体的视觉测量单元组数根据实际测量的燃料组件格架或底座的具体尺寸、数量以及测量要求来确定。
48.测量时,多组视觉测量单元的激光器21同时发射激光条纹,经反射镜5反射后,透过铅玻璃62,投射至燃料组件格架或底座。然后多组视觉测量单元的工业相机11同时通过反射镜5反射,透过铅玻璃62,捕捉获取激光条纹图像。再对捕捉的激光条纹图像进行图像分割和光心提取,得到上、下激光条纹中心。最后,基于水下多介质折射模型和上、下光平面方程进行三维重建,获取燃料组件格架或底座的三维点云数据,用于后续的弯扭变形计算,实现最终测量。
49.本发明上述实施例不仅具备一定的抗辐照性能,还具备一定的深水防水效果,通过卡箍连接块安装到不锈钢连接管,集成多组视觉测量单元,可进行燃料组件深水、辐照环
境下的瞬态非接触式变形测量。
50.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。上述各优选特征在互不冲突的情况下,可以任意组合使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1