一种基于星光角距测量信息的脉冲星导航方法
1.本发明涉及航天航空技术领域,具体为一种基于星光角距测量信息的脉冲星导航方法。
背景技术:
2.脉冲星导航技术是一种新兴的航天器自主导航技术,可应用于从近地到深空的全天域。脉冲星的自转周期非常稳定,可向外辐射稳定的周期信号。在太阳系质心(solar system barycenter,ssb)上预测的脉冲到达时间(time of arrival,toa)与在航天器上估计的脉冲到达时间(toa)之间的差异可以反映航天器沿脉冲星方向的位置。然而,由于脉冲星的信号非常微弱,航天器无法记录连续的脉冲信号,只能记录一系列光子toa。因此,脉冲星导航的关键技术之一是利用记录的光子toa序列估计脉冲toa。
3.对于静止或在脉冲星方向上作匀速直线运动的航天器,有历元折叠法和极大似然估计法两种方法可以很好地估计脉冲toa。然而,在实际应用中,航天器在轨进行轨道运动,导致脉冲星信号的多普勒频率随时间连续变化。在自主导航任务中,航天器的速度和位置是未知的,因此,很难消除多普勒频率的影响。在这种情况下,历元折叠式和极大似然估计方法是失效的。
4.专利申请号为201410133271.4的发明申请公开了一种高轨卫星的脉冲星/星光角距组合导航方法,该组合导航方法采用动静态非线性滤波器实现脉冲星测量信息和星光角距信息的最优融合,相比于脉冲星导航系统,组合导航系统的测量周期短;相比于cns,组合导航系统可获得高精度的导航信息。但是此类方法的脉冲toa需要先进行周期搜索,需要较大的计算量,不适用于星载实时计算。
5.专利申请号为201510491219.0的发明专利公开一种轨道动力学辅助动态脉冲星信号的处理方法,该方法根据脉冲星的自转频率和方向矢量、航天器相对于太阳的预估位置,借助航天器的轨道动力学,实现脉冲星动态信号的处理,但该方法需要的计算量较大,不适合于星载计算。
技术实现要素:
6.本发明目的在于提供一种基于星光角距测量信息的脉冲星导航方法,该方法将星光角距测量信息应用到了脉冲toa的计算过程中,利用了脉冲星的原始观测信息,是相比于原有方法更深度的信息融合;该方法能避免通过周期搜索计算脉冲toa,计算脉冲toa时计算量小,适合于星载计算。具体技术方案如下:一种基于星光角距测量信息的脉冲星导航方法,包括以下步骤:步骤一、x射线探测器观测脉冲星获取光子toa序列;获取星光角距观测值;步骤二、采用步骤一所的光子toa序列和星光角距观测值采用表达式9)计算脉冲toa;
ꢀꢀꢀꢀ
9);其中:为脉冲toa;为脉冲星相位;为脉冲星频率;t和t
end
为时刻;为光速;为脉冲星的方向矢量;和分别为t时刻和t
end
时刻地球的位置矢量;为表达式10):
ꢀꢀ
10);和分别为t时刻和t
end
时刻航天器相对地球的位置矢量的预估值;j为星光角距测量值的编号;n为星光角距的测量值的数目;t
s
为星光角距的测量周期;,为时间内的三次多项式,为jt
s
时刻的航天器相对地球的位置矢量的预估值,为(j+1)t
s
时刻航天器相对地球的位置矢量的预估值;步骤三、利用步骤二所得脉冲toa以及轨道力学信息,通过导航模块计算得到航天器的位置。
7.本发明可选的,所述步骤一中星光角距测量模型如表达式1):
ꢀꢀꢀꢀ
1);其中:为参考恒星的方向;为星光角距的测量噪声;为航天器相对地球的位置矢量;为的二范数。
8.本发明可选的,所述步骤二具体包括如下步骤:步骤2.1、利用星光角距观测值,使用滤波方法求解出航天器相对地球的位置矢量的预估值;步骤2.2、利用星光角距测量信息辅助计算脉冲toa,具体是:考虑航天器的运动,脉冲相位采用表达式2)表示:
ꢀꢀꢀ
2);其中:为时刻的初相;为τ时刻航天器的速度矢量;对于地球轨道的航天器满足表达式3):
ꢀꢀꢀ
3);其中:和分别为t时刻和时刻航天器相对地球的位置矢量的真实值;和分别为t时刻和时刻地球的位置矢量;将航天器相对地球的位置矢量的预估值带入表达式3)则有表达式4):
ꢀꢀꢀꢀꢀ
4);其中:和分别为t时刻和t0时刻航天器相对地球的位置矢量的预估值;将表达式3)和表达式4)代入表达式2)即得表达式5):
ꢀꢀꢀꢀꢀꢀ
5);采用三次样条插值的方法得到在星光角距采样周期内航天器在光子toa处的位置估计值;将光子toa折叠到最后一个脉冲周期得到脉冲toa详见表达式9)。
9.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
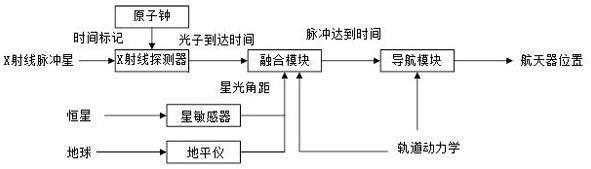
10.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1是本发明基于星光角距测量信息的脉冲星导航方法的流程图;图2是本发明实施例中星光角距测量示意图;图3是本发明方法与现有处理方法所得脉冲相位估计对比图;图4是本发明方法与现有轨道动力学辅助方法的cpu时间对比图;图5是本发明方法与现有星光角距导航方法所得导航结果对比图。
具体实施方式
11.以下结合附图对本发明的实施例进行详细说明,但是本发明可以根据权利要求限定和覆盖的多种不同方式实施。
12.实施例:一种基于星光角距测量信息的脉冲星导航方法,详见图1,包括以下步骤:步骤一、x射线探测器观测脉冲星获取光子toa序列;获取星光角距观测值;步骤二、采用步骤一所的光子toa序列和星光角距观测值计算脉冲toa;本实施例中:x射线探测器观测x射线脉冲星,通过原子钟对探测到的x射线光子进行标记,得到光子到达时间;步骤三、利用步骤二所得脉冲toa以及轨道力学信息(即轨道动力学),通过导航模块计算得到航天器的位置。
13.详情如下:步骤一中:采用星敏感器观测恒星,采用红外地平仪观测地球,从而获得星光角距观测值,星光角距测量示意图详见图2,此处星光角距测量模型如表达式1):
ꢀꢀꢀꢀ
1);其中:为参考恒星的方向;为星光角距的测量噪声;为航天器相对地球的位置矢量;为的二范数。
14.步骤二为融合测量信息计算脉冲toa,具体包括如下步骤:步骤2.1、利用星光角距观测值,使用滤波方法求解出航天器的预估位置;此处可采用ukf、ekf等传统的滤波方法进行求解,参见现有技术;步骤2.2、利于星光角距测量信息辅助计算脉冲toa,具体是:考虑航天器的运动,脉冲相位采用表达式2)表示:
ꢀꢀꢀ
2);其中:为脉冲toa;为时刻的初相;为τ时刻航天器的速度矢量;为脉冲星频率;t和t0为时刻,即光子达到时间;为光速;为脉冲星方向矢量;对于地球轨道的航天器满足表达式3):
ꢀꢀꢀ
3);其中:和分别为t时刻和时刻航天器相对地球的位置矢量的真实值;和为t时刻和时刻地球的位置矢量,可以从地球的星历表获得;将航天器相对地球的位置矢量的预估值带入表达式3)则有表达式4):
ꢀꢀꢀꢀꢀ
4);其中:和分别为t时刻和t0时刻航天器相对地球的位置矢量的预估值,和均通过星光角距观测值求解得到(即参见步骤2.1),将表达式3)和表达式4)代入表达式2)即得表达式5):
ꢀꢀꢀꢀꢀꢀ
5);表达式5)是在假设光子到达时间间隔接近星光角距测量的采样周期情况下的星光角距辅助的脉冲星相位传播模型。然而,每个记录光子toa之间的差异远小于恒星角度的采样周期。为了利用所有的光子,采用三次样条插值的方法得到在星光角距采样周期内航天器在光子toa处的位置估计值。如果光子的到达时间t满足t∈[jt
s
,(j+1)t
s
],则可表示为表达式6):
ꢀꢀꢀꢀ
6);其中:为时间内的三次多项式;t为光子到达时间;j为星光角距测量值的编号;n为星光角距的测量值的数目;t
s
为星光角距的测量周期、为jt
s
时刻的航天器相对地球的位置矢量的预估值;为(j+1)t
s
时刻航天器相对地球的位置矢量的预估值。
[0015]
则有星光角距测量辅助相位传播模型如表达式7),采用表达式7)来估计脉冲相位,则许多光子没有被利用,这显著降低了脉冲相位估计的相位精度。
[0016]
ꢀꢀꢀꢀ
7);
其中如表达式8):
ꢀꢀꢀꢀ
8);为了保证实时导航性能,我们将光子toa折叠到最后一个脉冲周期,则有表达式9):
ꢀꢀꢀꢀ
9);其中:为脉冲星相位;t和t
end
为时刻;和分别为t时刻和t
end
时刻地球的位置矢量;为表达式10):
ꢀꢀ
10);和分别为t时刻和t
end
时刻航天器相对地球的位置矢量的预估值,和均通过星光角距观测值求解得到(参见步骤2.1)。
[0017]
本实施例中表达式9)中轨道效应的影响基本由消除。 此时,脉冲星相位可以利用传统的历元折叠法、极大似然等方法求解,参见现有技术。
[0018]
本实施例中导航模块计算航天器位置的方法可通过ukf、ekf等传统的滤波方法实施,参见现有技术。导航模块的工作步骤可参考2011年国防科学技术大学孙守明的论文“基于x射线脉冲星的航天器自主导航方法研究”。
[0019]
应用本实施例方案进行仿真试验,详情如下:一、脉冲toa计算(1)仿真条件针对轨道根数如表1所示的高轨航天器,假设航天器初始状态误差为[5km,5km,5km]和[5m/s,5m/s,5m/s]。观测脉冲星选择psr b1821
‑
24,其参数如表2所示,观测的恒星如表3所示。星光角距采样周期为10s,地平仪精度为0.02
°
,星敏感器精度为3''。
[0020]
表1 航天器轨道根数轨道根数航天器轨道倾角/
°
10.4半长轴/km42200偏心率0.00151升交点赤经/
°
322.4近地点角距/
°
201.6平近点角/
°
184.5表2 psr b1821
‑
24 仿真参数
参数值周期/ms3.05流量/ph
·
s
‑
11.93背景噪声/ph
·
s
‑
150表 3 参考恒星恒星siruscanpusarcturus赤经/
°‑
16.72
‑
52.7019.18赤纬/
°
101.2995.99213.92(2)仿真结果轨道动力学辅助动态脉冲星信号的处理方法(该方法需要通过周期搜索进行脉冲toa估计)和本发明方法(即星光角距测量信息辅助相位估计)的脉冲相位估计结果如图3所示。本发明提出的星光角距测量辅助相位估计方法的相位估计精度略低于轨道动力学辅助方法。对于psr b1821
‑
24脉冲星,相位估计的差约为1
×
10
‑3个周期,大约导致900米左右的位置误差。此外,脉冲相位误差在实际应用中是一种随机误差。因此,相位估计的差异对最终的导航性能影响不大。
[0021]
计算环境包含intel core i5
‑
7500@3.4ghz和python3.8。用cpu时间表示算法的计算量。如图4所示,随着观测周期的增加,轨道动力学辅助方法的cpu时间从0.45秒增加到20.9秒,本发明方法的cpu时间从0.35秒增加到0.4秒。因此,本发明的星光角距辅助相位估计方法的计算量远低于轨道动力学辅助方法,且几乎不随数据量的增加而增加。
[0022]
二、导航性能(1)仿真条件选择psr b1937+21、psr b1821
‑
24和psr j0218+4232作为导航脉冲星。假设初始状态误差为[5km,5km,5km]和[5m/s,5m/s,5m/s],星敏感器的精度为3
″
,地平敏感器的精度为0.05
°
,星光角距的采样周期为10s,脉冲星的观测周期为1000s。
[0023]
(2)仿真结果图5显示了本发明方法和星光角距导航方法的导航结果。在初始阶段,星光角距导航方法的位置误差小于本发明方法(即深组合导航方法)。随着导航时间的增加,本发明方法的定位误差逐渐减小。当导航时间为9天左右时,星光角距导航方法的定位误差大于本发明方法。当导航周期为20天时,本发明方法的位置误差比星光角距导航方法小约42.3%。
[0024]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1