一种飞机疲劳试验中内舱结构巡检的标定融合方法与流程
1.本技术属于飞机结构强度全机疲劳试验领域,特别涉及一种飞机疲劳试验中内舱结构巡检的标定融合方法。
背景技术:
2.飞机全机结构强度试验采用基于5g+机器视觉的飞机结构损伤检测方法,检测飞机内舱表面损伤和缺陷,以及形变鼓包缺陷等,基于5g+机器视觉的飞机结构损伤检测方法中使用巡检小车+轨道+机械手+视觉模组,视觉模组的采集单元包括结构光3d相机、双目相机、5k高清工业相机、监控相机等多种类相机,重点检测飞机结构损伤、表面缺陷以及固定位置的三维轮廓,用于对比轮廓与原始状态的差异。基于5g+机器视觉的飞机结构损伤检测系统针对飞机内舱巡检会产生多种数据,包括巡检小车控制信息、轨道定位信息,位置校正信息、机械手控制信息、3d和2d图像信息等,这些信息相对独立。在进行数据的对比时,很可能导致不同设备输出的同一采集点的信息之间有一定的差别,从而导致每个检测点的不同部位采集的定位信息与视觉信息之间具有一定的偏差,从而导致采集到的图像信息模糊不准确,损伤状态与试验状态不同步,无法准确锁定损伤出现的准确位置和时间,影响飞机结构疲劳损伤分析,降低了数据的使用价值。
3.因此需要设计一种方法,来减少不同设备之间输出信息的误差,对前端的设备进行精准控制,保证采集的图像清晰。
技术实现要素:
4.本技术的目的是提供了一种飞机疲劳试验中内舱结构巡检的标定融合方法,以解决现有技术中不同设备采集对同一采集点采集时数据不同步而导致的图像不清晰的问题。
5.本技术的技术方案是:一种飞机疲劳试验中内舱结构巡检的标定融合方法,包括,在试验初始载荷状态,对巡检系统进行复位,记忆并融合当前巡检小车、轨道、机械手、各类相机的焦距和视野信息;确定巡检小车的停靠位,在巡检小车每到达一个停靠位时,记忆并融合巡检小车和轨道的定位信息;以3d结构光相机、5k高清工业相机的焦距与视野作为标准,控制机械手的6个关节角度调节末端姿态,记忆机械手的定位信息;各相机工作并采集图像,对3d结构光相机、5k高清工业相机、高清监控相机的图像信息进行融合;对巡检小车和轨道的停靠位信息、机械手定位信息、相机的焦距和视野的信息进行融合,作为巡检标定信息,以示教的方式实现日后固定区域的视觉巡检。
6.优选地,设置数据融合平台,所述数据融合平台对采集到的各类信息进行分类存储、对采集端数据进行融合并对巡检系统进行控制。
7.优选地,在巡检过程中同步获取疲劳试验的试验载荷状态信息,将试验载荷状态信息融合至巡检标定信息内,并对受试验载荷影响的标定信息进行修正。
8.优选地,所述巡检系统采用分组的方式进行定位,每个停靠位作为一个检测点,并作为一组信息通过数据融合平台存储在一个存储文件内。
9.优选地,所述数据融合平台内对轨道上每个采集点的数据进行登记,并记录相应的地址信息,所述巡检系统采集的数据通过登记的地址信息保存至相应的存储文件内,所述数据融合平台通过登记的信息调取相应的存储文件对巡检系统进行控制。
10.优选地,所述巡检系统与数据融合平台之间设置5g终端模组,所述5g终端模组采用预处理的方式将采集端采集的数据实时传输至数据融合平台,所述数据融合平台通过5g终端模组对巡检系统进行实时控制。
11.优选地,所述数据融合平台内的每组试验载荷状态信息与巡检标定信息一一对应,所述巡检系统对采集点进行巡检的过程中,将检测到的数据实时传输至数据融合平台,所述数据融合平台实时接收采集端采集到的信息,并实时获取疲劳试验中的试验载荷状态信息,并根据获取的试验载荷状态信息调取对应的巡检标定信息,并通过巡检标定信息对当前状态的巡检系统进行控制。
12.优选地,所述巡检系统采用轨道、巡检小车和机械手的方式进行数据的采集,所述轨道沿着舱内重点部位设置,所述巡检小车采用脉冲驱动齿轮与轨道通过齿条配合,并采用光电传感器进行位置的校准,带动机械手沿着轨道巡回运动。
13.一种飞机疲劳试验中内舱结构巡检的标定融合系统,包括,定位信息融合模块,用于对巡检小车控制信息、轨道定位校正信息、机械手控制信息进行融合;视觉融合模块,用于对3d结构光相机、5k高清工业相机、高清监控相机采集到的视觉图像信息进行融合;疲劳试验信息模块,用于接收疲劳试验中的试验载荷状态信息;整体数据融合模块,用于接收定位信息融合模块、视觉融合模块和疲劳试验信息模块的数据并将相互对应的数据一一进行标定融合。
14.一种飞机结构强度全机疲劳试验台,其特征在于:包括如权利要求1
‑
8任一所述的标定融合方法。
15.本技术的一种飞机疲劳试验中内舱结构巡检的标定融合方法,通过先对巡检系统的定位信息进行融合,再对各类相机的图像信息进行融合,最后将这两类信息进行同步融合,保证了各类信息数据的同步,实现了对飞机内舱检测点图像的精准采集。
16.优选地,通过同步采集疲劳试验中的试验载荷状态信息,能够对飞机试验过程产生的形变而导致的标定数据偏差进行修正,从而保证了标定数据的精确性,能够对巡检系统进行稳定控制。
附图说明
17.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
18.图1为本技术整体方法结构示意图;
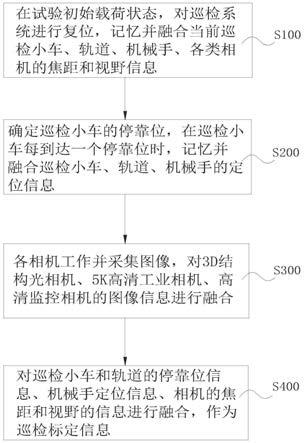
19.图2为本技术整体流程结构示意图。
20.1、定位信息融合模块;2、视觉融合模块;3、疲劳信息融合模块;4、整体数据融合模块。
具体实施方式
21.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中
的附图,对本技术实施例中的技术方案进行更加详细的描述。
22.实施例一,一种飞机疲劳疲劳试验中内舱结构巡检的标定融合方法
23.采用巡检系统对飞机舱内的裂纹损伤和3d形变形变损伤图像进行采集,巡检系统在内舱内沿飞机重点检测部位设置轨道,并在轨道上设置沿轨道运行的巡检小车,巡检小车上设置多自由度机械手,机械手的末端、也即是远离巡检小车的一端设置各类相机对飞机内舱的裂纹损伤和3d形变形变损伤图像进行采集。
24.其中相机包括3d结构光相机、5k高清工业相机、高清监控相机,三者相机具有共同的视野。各类相机采集的图像信息、巡检小车、轨道、机械手的位置信息均作为采集端采集的信息传输至后台进行处理。
25.在巡检系统运行的过程中,飞机全机静力/疲劳试验同步运行,并相互对应。
26.如图1、2所示,包括:
27.步骤s100,在试验初始载荷状态,对巡检系统进行复位,记忆并融合当前巡检小车、轨道、机械手、各类相机的焦距和视野信息;
28.步骤s200,确定巡检小车的停靠位,在巡检小车每到达一个停靠位是,记忆并融合巡检小车和轨道的定位信息;以3d结构光相机、5k高清工业相机的焦距和视野作为标准,控制机械手的6个关节调节末端姿态,记忆机械手的定位信息;
29.步骤s300,各相机工作并采集图像,对3d结构光相机、5k高清工业相机、高清监控相机的图像信息进行融合;
30.步骤s400,对巡检小号侧的停靠位信息、机械手定位信息、相机的焦距和视野的信息进行融合,作为巡检标定信息,以示教的方式实现日后固定区域的视觉巡检。
31.通过对巡检小车、轨道、机械手的定位信息进行融合,实现高精度重复定位,通过对3d结构光相机、5k高清工业相机、高清监控相机的图像信息进行融合,保证采集到的表面裂纹损伤和3d形变损伤图像同步,并能够完整显示,再通过对巡检小车和轨道的停靠位信息、机械手定位信息、相机的焦距和视野的信息进行融合,保证了采集端所采集的所有信息的同步与准确,从而能够保证相机能够采集到高清的图像,能够准确锁定损伤出现的位置和时间,以进行有效的飞机结构疲劳损伤分析,保证了数据的使用价值。
32.通过对多种相机进行视觉融合,各相机的综合视野能够达到300mm*350mm,检测精度可达0.4mm。并且采用分步融合的方式进行信息的融合,先融合类型相同的信息,再融合不同类型的信息,有效提升了标定融合的效率。
33.优选地,设置数据融合平台,数据融合平台对采集到的各类信息进行分类存储、对采集端数据进行融合并对巡检系统进行控制。数据融合平台通过数据融合后的巡检标定信息对巡检系统进行控制,有效保证了对巡检系统控制的精度并能够对巡检系统进行实时的修正,通过对数据进行分类存储方便数据的调取。
34.优选地,在进行疲劳试验的过程中,飞机有可能产生形变从而导致轨道发生变化,轨道的变化会导致原有的标定信息发生偏差,同时全机疲劳试验产生的信息不会受到飞机形变的影响。对于此问题采用的方法为:
35.在巡检过程中同步获取疲劳试验的试验载荷状态信息,将试验载荷状态信息融合至巡检标定信息内,并对受试验载荷影响的标定信息进行修正。通过将试验载荷状态信息对标定信息进行修正,有效保证了巡检标定信息的精度,保证了巡检系统图像采集的质量。
36.优选地,巡检系统采用分组的方式进行定位,每个停靠位作为一个检测点,并作为一组信息通过数据融合平台存储在一个存储文件内。分组的设计提高了巡检系统巡检的规律性,方便操控;通过采用分组的方式记忆定位信息,即方便数据的调取与控制,也方便数据的查阅。
37.优选地,所述数据融合平台内对轨道上每个采集点的数据进行登记,并记录相应的地址信息,巡检系统采集的数据通过登记的地址信息保存至相应的存储文件内,数据融合平台通过登记的信息调取相应的存储文件对巡检系统进行控制。通过该设置,保证各类数据进行稳定的分类存储和调取。
38.优选地,巡检系统与数据融合平台之间设置5g终端模组,5g终端模组采用预处理的方式将采集端采集的数据实时传输至数据融合平台,数据融合平台通过5g终端模组对巡检系统进行实时控制。
39.5g网络进行毫秒级传输,能够实时上传巡检小车控制信息、轨道定位校正信息、机械手控制信息、各相机视觉信息至数据融合平台,并且能够对巡检系统进行实时控制,保证了数据的实时性。
40.优选地,数据融合平台的每组试验载荷状态信息与巡检标定信息一一对应,巡检系统对采集点进行巡检的过程中,将检测到的数据实时传输至数据融合平台,数据融合平台实时接收采集端采集到的信息,并实时获取疲劳试验中的试验载荷状态信息,并根据获取的试验载荷状态信息调取对应的巡检标定信息,并通过巡检标定信息对当前状态的巡检系统进行控制。通过配合使用试验载荷状态信息,能够对巡检系统在进行数据采集时进行实时的准确定位与校正,保证各相机数据采集的准确性。
41.优选地,巡检系统采用轨道、巡检小车和机械手的方式进行数据的采集,轨道内沿着舱内重点部位设置,巡检小车采用脉冲驱动齿轮与轨道通过齿轮配合,并采用光电传感器进行位置的校准,带动机械手沿着轨道巡回运动。小车采用脉冲驱动齿轮,一方面与齿轮配合实现稳定精准的运行,另一方面与光电传感器配合能够精确的定位,其最终定位精度可达0.1mm。
42.实施例二,作为一种具体实施方式,一种飞机疲劳试验中内舱结构巡检的标定融合系统,包括定位信息融合模块1、视觉融合融合2、疲劳试验信息模块3和整体数据融合模块4。
43.定位信息融合模块1用于对巡检小车控制信息、轨道定位校正信息、机械手控制信息进行融合;
44.视觉融合模块2用于对3d结构光相机、5k高清工业相机、高清监控相机采集到的视觉图像信息进行融合;
45.疲劳试验信息模块3用于接收疲劳试验中的试验载荷状态、仪表类数据等信息,并传输至整体数据融合模块;
46.整体数据融合模块4用于接收定位信息融合模块、视觉融合模块和疲劳试验信息模块的数据并将相互对应的数据一一进行标定融合。
47.通过对各类数据进行标定融合,在巡检系统的运行过程中,能够将各类信息同步从而采集到清晰的图像信息,以便于后续的结构疲劳损伤分析。
48.实施例三,作为一种具体实施方式,一种飞机结构强度全机疲劳试验台,包括如实
施例一所述的标定融合方法。采用该方法,在飞机疲劳试验中能够对飞机关键部位及不可达部位进行精准巡检,保证获得高精度重复定位和视觉信息。
49.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1