基于速度反馈原理的摆式加速度计闭环控制系统及方法与流程
1.本发明属于加速度计闭环控制技术领域,具体涉及基于速度反馈原理的摆式加速度计闭环控制系统及方法。
背景技术:
2.加速度计作为惯性导航系统中的核心组件之一,为系统提供加速度信息,其精度直接影响导航系统精度。目前国内外高精度加速度计,基本上都采用闭环控制模式,即在加速度计内部通过检测摆组件的偏移情况,提供反馈控制信号,计算解调后控制驱动器,将摆组件拉回平衡位置,从而实现高精度加速度的测量。闭环控制的加速度计,由于可以将摆组件束缚在固定位置附近,因此在静态精度、抗干扰能力等方面,相对于开环加速度计,表现出明显优势。
3.传统的加速度计闭环控制系统,一般由位移检测装置、解调放大装置、驱动装置组成。由于位移检测装置,只能实现摆组件偏离平衡位置的距离检测,也即位移检测,但是被控对象为加速度值,位移量是加速度量经过两次积分得到,其幅频特性中的相角值,就会比加速度信号滞后180
°
,解调放大装置输出的信号,总是滞后于外界加速度的变化,导致该类加速度计存在动态跟踪性差、谐振明显、振动误差大的缺点。中国专利cn201710613390.3公开了一种加速度计控制方法。此方法检测加速度计输入信号,通过计算机判断信号类型、外界振动情况等,从而给出补偿量。其缺陷是依赖复杂的采样、数据处理装置及算法,复杂度很高,且在复杂的振动条件下,无法给出准确补偿量,极大限制了其应用领域。从理论上来说,通过位移量的检测来控制加速度量,总是存在滞后效应,即使设计出更加复杂的控制系统,也只能对现有问题进行少许改善,无法从根本上解决。
技术实现要素:
4.鉴于现有技术的上述问题,本发明的目的是提供一种基于速度反馈原理的摆式加速度计闭环控制系统。
5.一种基于速度反馈原理的摆式加速度计闭环控制系统,包括:速度检测单元、位移检测单元、信号拾取及控制单元和力反馈执行单元;信号拾取及控制单元分别与速度检测单元、位移检测单元、力反馈执行单元电连接;
6.速度检测单元用于检测摆组件的运动速度,位移检测单元用于检测摆组件的位移变化,力反馈执行单元用于摆组件摆动之后,将摆组件拉回平衡位置;信号拾取及控制单元用于接收速度检测单元输入的表征运动速度的速度信号、接收表征位移变化的位移信号,并根据两个信号确定反馈力大小;并将带有反馈力大小的驱动信号输送给力反馈执行单元,力反馈执行单元接收驱动信号后,将驱动信号转化为驱动摆组件运动的扭转力。
7.进一步的,速度检测单元包括速度检测线圈、磁钢及磁场回路、信号解调器;
8.速度检测线圈安装在摆组件的动端下;速度检测线圈处于力速度检测单元的磁场中;速度检测单元的磁钢、位移检测单元固定于系统的底座;信号解调器设置于速度检测线
圈与信号拾取及控制单元之间;
9.速度检测线圈相对磁钢发生运动时,由电磁感应原理,在速度检测线圈的两端形成与速度成正比的电势差信号;信号解调器用于将速度检测线圈感应的电势差信号解调放大为速度信号。
10.进一步的,速度检测线圈采用多匝带绝缘外皮的导电线缆绕制而成。
11.进一步的,位移检测单元所选择的位移传感器包括电容式、光电式、光栅式位移传感器。
12.一种基于速度反馈原理的摆式加速度计闭环控制方法,包括:
13.从速度检测单元拾取速度信号,从位移检测单元拾取位移信号;
14.对速度信号和位移信号进行综合处理,得到反馈信号;反馈信号能直接影响加速度计表芯的阻尼系数,即控制系统响应速度,能调节到超过系统要求的带宽,能形成无差系统,提升控制精度;
15.将反馈信号反馈给输入力矩器线圈。
16.进一步的,综合处理的传递函数为:
[0017][0018]
其中:u
o
为控制系统输出;i
in
为位移检测单元检测并解调出的位移信号;α为摆组件的偏移角度,即速度信号;k1,k2,k3为各控制项的比例系数;s是信号的微分符号,1/s是信号的积分符号。
[0019]
进一步的,将反馈信号反馈给输入力矩器线圈之后,所述方法还包括:
[0020]
将反馈信号转化为驱动摆组件运动的扭转力,推动摆组件返回平衡位置,达到力平衡状态。
[0021]
进一步的,力反馈执行单元的具体实现形式包括电磁式、静电式。
[0022]
采用本发明可完成基于速度信号反馈的加速度计闭环控制功能。相比于传统的单一基于位移信号的闭环反馈控制方法,新方法的控制滞后性明显降低,可有效预判摆组件的运动趋势,提升动态控制精度,提升加速度计对高动态信号的跟踪性和复现性。同时,由于摆组件跟随性优化的原因,可有效降低摆组件的摆动幅度,一方面可降低非线性因素带来的振动误差问题,另一方面提升加计耐受振动和冲击的性能,提升可靠性。
附图说明
[0023]
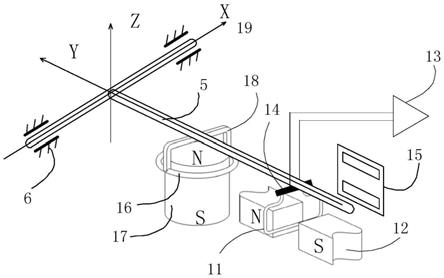
图1为本发明闭环控制系统中的速度检测单元,位移检测单元,力反馈执行单元,以及摆组件的一种实现方式图;
[0024]
图2为本发明闭环控制系统中的总体逻辑结构图;
[0025]
图3a为基于位移反馈的控制效果图;
[0026]
图3b为基于速度反馈的控制效果图。
具体实施方式
[0027]
下面参考附图,结合具体实施例,详细描述技术方案:
[0028]
本发明提供一种基于速度反馈原理的摆式加速度计闭环控制系统,如图1所示,包
括:
[0029]
速度检测单元1,用于检测摆组件的速度信号。速度检测单元包括速度检测线圈、磁钢及磁场回路和信号解调器。在其中所述的磁钢,固定在加速度计的底座上,可产生一定区域内的匀强磁场;其中所述的速度检测线圈由带有绝缘外皮的导电线缆绕制而成,一端固定在摆组件上,可随摆组件运动,另一端导线放入垂直于线圈平面的磁场中。工作时,当摆组件相对于固定在底座上的磁钢发生相对运动时,带动速度感应线圈运动,由电磁感应原理,就会在线圈两端产生与运动速度相关的电势差信号u,经过信号解调器的检测与解调,可产生与速度成正比的电压信号,从而达到摆组件速度检测的功能。
[0030]
位移检测单元2,用于检测加速度计摆组件相对于平衡位置的位移情况。可输出与摆组件位移成比例的电信号,达到摆组件位移测量的目的。其具体实现方式可以是电容式、光电式、光栅式等多种形式。
[0031]
信号拾取及控制单元3,用于拾取速度检测单元产生的速度信号,以及位移检测单元产生的位移信号。信号拾取及解调单元获得速度信号及位移信号后,综合二者信息,形成力反馈电流信号,提供给加速度计力反馈机构,用于控制加速度计摆组件的位置,从而检测外界加速度;
[0032]
具体的控制系统设计方法为:
[0033]
①
拾取的速度信号,对信号进行比例放大后,反馈输入力矩器线圈。速度信号用于调节加速度计表芯的阻尼系数,提升系统相应速度。
[0034]
②
拾取的位移信号,对信号进行比例放大后,反馈输入力矩器线圈。位移信号用于调节加速度计表芯的本征频率。
[0035]
③
对位移信号进行积分及放大后,反馈输入力矩器线圈。位移的积分信号,主要用于形成无差系统,提升控制精度。
[0036]
④
以上信号在反馈入力矩器线圈前,需要进行综合处理,一般是加法及反向处理。
[0037]
具体的控制系统设计方法为:
[0038]
①
拾取的速度信号,对信号进行比例放大后,反馈输入力矩器线圈16。速度信号的反馈,可直接影响加速度计表芯的阻尼系数,即控制系统响应速度。根据经验方法,阻尼系数调节原则为,将摆组件的阻尼系数与本征频率相匹配,形成略微的欠阻尼系统,一般按照1.2的比例进行设计,即将系统特征根定位在ω
n
±
1.2ω
n
处,其中ω
n
为系统要求的带宽频率。
[0039]
②
拾取的位移信号,对信号进行比例放大后,反馈输入力矩器线圈16。位移信号用于调节加速度计表芯的本征频率。表芯的本征频率,需调节到超过系统要求的带宽。
[0040]
③
对位移信号进行积分及放大后,反馈输入力矩器线圈16。位移的积分信号,主要用于形成无差系统,提升控制精度。
[0041]
④
以上信号在反馈入力矩器线圈16前,需要进行综合处理,一般是加法及反向处理。所形成的传递函数可表示为:
[0042][0043]
其中,u
o
为控制系统输出;i
in
为位移检测单元检测并解调出的位移信号;α为摆组件的偏移角度;k1,k2,k3为各控制项的比例系数,需根据需要进行调节;s对信号的微分或积
分符号。
[0044]
以上方法的具体实现,可以使用电路中的运算放大器、差分放大器、加法器等方法实现,也可使用计算机、带有编程功能的芯片等方法实现。
[0045]
力反馈执行单元4,接收信号拾取及解调单元的驱动信号后,将力反馈电流信号转化为驱动摆组件运动的扭转力,从而推动摆组件返回平衡位置,达到力平衡状态。力反馈执行单元的具体实现形式可以是电磁式、静电式等多种形式。
[0046]
摆组件5,有一端固定的摆组件构成。当外界存在加速度时,另一端就会围绕固定端发生移动或摆动,从而达到将加速度信号变为运动信号的作用。
[0047]
上述摆组件5与速度检测单元1和位移检测单元2相连,产生的运动信号可以被二者检测。而后都与信号拾取及控制单元3相连,产生最终控制控制信号后与力反馈执行单元4相连。
[0048]
首先,按照图1所示搭建加速度计结构。图中两块ns极相对的磁钢,可在之间的区域产生匀强磁场。速度感应线圈与摆组件相连,另一端放入匀强磁场中。当外界加速度影响时,摆组件受到惯性力作用,产生相对转轴的摆动,此时摆组件产生速度并发生位移。速度感应线圈在磁场中感应出电动势,聚集在线圈两个端点处,形成电势差。此电势差与线圈的摆动速度成正比,方向与摆组件的摆动方向及线圈绕制方式相关。此电势差经过差动放大电路的调理后,可转变为与摆组件摆动速度成比例的电压信号。图1中所示位移传感器,可采用电容式、光电式等多种形式,实现位移检测,输出与位移成正比的电压信号。
[0049]
随后,按照图2,将速度检测单元及位移检测单元测得的速度及位移信号,接入信号拾取及控制单元。此单元可对二种信号进行运算与综合。实际使用中,需要根据被控对象,也就是加速度测量单元的传递特性进行参数设计。一般情况下,需要搭建积分器、比例放大器、加法器及其组合来实现控制算法。
[0050]
信号拾取及控制单元输出控制信号,送入力反馈执行单元。力反馈单元中的力矩器线圈,放在力矩器磁钢中,当有电流流过时,可产生垂直于线圈的力,抵消摆组件上的惯性力,将摆组件拉回平衡位置,实现力平衡。此时,施加在摆组件上的惯性力,与线圈中的电磁力相等。
[0051]
按照图2连接前面搭建的各个单元结构,构成闭环反馈控制结构。摆组件实现力平衡时,通过检测线圈中的电流,就可获得外加加速度信息,从而实现加速度的测量。
[0052]
本发明提出了摆式加速度计摆组件摆动速度的检测方法,并将速度信号引入闭环控制系统,形成一种新型的控制模式。此控制系统,由于引入速度信号,极大降低了检测信号的滞后性,从而提升了闭环控制系统的反馈灵敏度。从仿真及实践中都可以验证,采用此控制方法的加速度计,其动态跟踪特性得到明显提升,振动误差明显下降。如图3a和3b所示,基于位移反馈和基于速度反馈的控制效果对比,可以看出,基于速度反馈控制的谐振峰值,可以控制在1db左右,而基于位移反馈的控制,一般都要超过5db,说明在信号的跟踪特性上得到明显改善,动态性提升较大。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1