包括直方图状态监视装置的飞行时间测距传感器及其方法与流程
1.本公开涉及飞行时间测距领域,更具体地,涉及到一种包括直方图状态监视装置的飞行时间测距传感器及其方法。
背景技术:
2.飞行时间传感器(time
‑
of
‑
flight)技术被认为是最优越的传感器技术之一,由于它的出现,引起了在各种应用场景中应用的移动设备中装载3d摄像头的趋势,并且随着物联网技术以及半导体技术的发展,其应用领域还将继续得到拓展,此外,对其性能进行提升的相应研究也正在进行。
3.现有的飞行时间传感器通过向对象打光并检测光子的入射,并且记录检测到光子的时间,从而判断飞行时间传感器和对象之间的距离。
技术实现要素:
4.技术问题
5.飞行时间传感器的打光次数固定,在信号或背景光过强的情况下容易是、使直方图存储器饱和,从而使计算的距离信息产生误差;当光学条件良好时,可以使直方图很快达到很高的信噪比,所以之后的打光对提升距离精度没有帮助,但是消耗了额外的能量。
6.问题的解决方案
7.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,包括:单光子雪崩探测器spad像素阵列,其被配置为检测光子的入射并且输出脉冲信号;时间数字转换器tdc,其被配置为记录与spad被击穿产生的脉冲信号的时刻相关的信息;直方图生成装置,其被配置为基于tdc记录的信息生成直方图信息;以及直方图状态监视装置,其被配置为实时监测直方图的状态,并且根据监测结果停止打光,输出直方图。
8.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,所述直方图生成装置被配置为将tdc记录的数值作为直方图存储器的地址值,读取对应地址所存储的数据并加1,并且将相加之后的数值写回对应地址以生成直方图信息。
9.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,所述直方图状态监视装置被配置为包括第一寄存器、第二寄存器和比较器;其中,第一寄存器存储预先设定的第一阈值,并且第二寄存器存储与当前tdc记录的数值对应的地址的直方图存储器的值;并且所述比较器比较第一寄存器和第二寄存器的值,并且当第二寄存器的值大于第一阈值时,停止打光,输出直方图。
10.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,所述直方图状态监视装置被配置为包括计数器,所述计数器被配置为用于对打光次数进行计数,并且当计数值达到第二阈值时,启动直方图状态监视装置。
11.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,所述直方图状态监视装置被配置为包括第三寄存器和比较器,所述第三寄存器被
配置为存储当前tdc记录的数值对应的地址的直方图存储器的值,并且所述比较器比较第三寄存器的值和根据计数器的计数值计算的第三阈值,并且当第三寄存器的值大于第三阈值时,停止打光,输出直方图。
12.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,所述直方图状态监视装置被配置为包括第四寄存器,所述第四寄存器存储直方图存储器中的第一个地址值对应的值,其中,当所述tdc计时开始时刻早于打光时刻时,所述第四寄存器存储直方图存储器中的第一个地址值对应的值对应于背景光的强度。
13.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,当第四寄存器存储的值大于第四阈值时,提高打光的强度,并且其中,当第四寄存器存储的值小于第五阈值时,降低打光的强度。
14.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,所述直方图状态监视装置被配置为包括第五寄存器和处理器,所述第五寄存器存储对应于与tdc记录的数值对应的地址的直方图存储器的值中的最大值,并且所述处理器根据第四寄存器中的值和第五寄存器中存储的值以及与第五寄存器中存储的值相对应的地址值来计算信噪比。
15.根据本公开的一方面提出了一种包括直方图状态监视装置的飞行时间测距传感器,其中,根据信噪比调整打光,包括:当信噪比高于预设第六阈值时,停止打光,输出直方图。
16.根据本公开的一方面提出了一种控制包括直方图状态监视装置的飞行时间测距传感器的方法,包括以下步骤:检测光子的入射并输出脉冲信号;记录与输出脉冲信号的时刻相关的信息;基于与输出脉冲信号的时刻相关的信息生成直方图信息;以及实时监测直方图的状态,并且根据监测结果停止打光,输出直方图。
17.公开的有益效果
18.本公开的飞行时间测距传感器通过直方图状态监视装置实时监测直方图的状态,判断是否需要停止打光,从而缩短曝光时间,降低整体功耗;此外,本公开的飞行时间测距传感器还能够表征当前测试环境的光学条件,从而动态地控制系统。
附图说明
19.从以下结合附图的描述中,本公开的特定实施例的上述和其他方面、特征和优点将变得更加明显,其中:
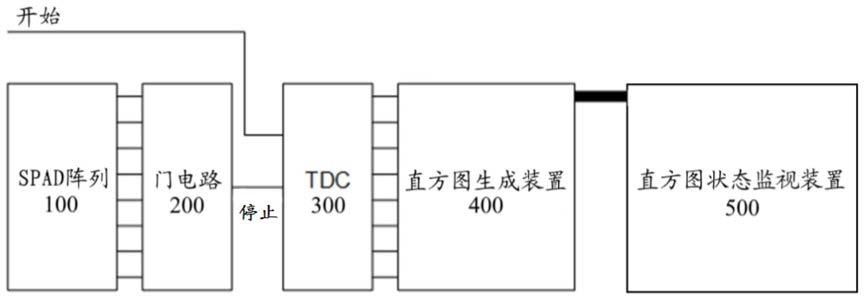
20.图1是根据本公开实施例的飞行时间测距传感器的示意图;
21.图2是根据本公开另一实施例的飞行时间测距传感器的示意图;
22.图3是根据本公开另一实施例的飞行时间测距传感器的示意图;
23.图4是根据本公开另一实施例的飞行时间测距传感器的示意图;
24.图5是根据本公开实施例的飞行时间测距方法的流程图。
具体实施方式
25.在进行下面的详细描述之前,阐述贯穿本专利文件使用的某些单词和短语的定义可能是有利的。术语“包括”和“包含”及其派生词是指包括但不限于。术语“或”是包含性的,
意思是和/或。短语“与
……
相关联”及其派生词是指包括、包括在
……
内、互连、包含、包含在
……
内、连接或与
……
连接、耦接或与
……
耦接、与
……
通信、配合、交织、并列、接近、绑定或与
……
绑定、具有、具有属性、具有关系或与
……
有关系等。术语“控制器”是指控制至少一个操作的任何设备、系统或其一部分。这种控制器可以用硬件、或者硬件和软件和/或固件的组合来实施。与任何特定控制器相关联的功能可以是集中式的或分布式的,无论是本地的还是远程的。短语“至少一个”,当与项目列表一起使用时,意指可以使用所列项目中的一个或多个的不同组合,并且可能只需要列表中的一个项目。例如,“a、b、c中的至少一个”包括以下组合中的任意一个:a、b、c、a和b、a和c、b和c、a和b和c。
26.贯穿本专利文件提供了其他特定单词和短语的定义。本领域普通技术人员应该理解,在许多情况下,即使不是大多数情况下,这种定义也适用于这样定义的单词和短语的先前和将来使用。
27.在本专利文件中,变换块的应用组合以及子变换块的划分层级仅用于说明,在不脱离本公开的范围内,变换块的应用组合以及子变换块的划分层级可以具有不同的方式。
28.以下讨论的图1至图4以及用于描述本专利文档中的本公开的原理的各种实施例仅作为说明,并且不应以任何方式解释为限制本公开的范围。本领域技术人员将理解,本公开的原理可以在任何适当布置的系统或设备中实施。
29.图1示出了根据本公开实施例的飞行时间测距传感器,包括:spad(single photon avalanche detector,单光子雪崩探测器)像素阵列100,其被配置为检测光子的入射并且输出脉冲信号;tdc(time to digital convertor,时间数字转换器)300,其作为高精度的时钟,被配置为记录与spad被击穿产生的脉冲信号的时刻相关的信息;直方图生成装置400,其被配置为基于tdc 300记录的信息生成直方图信息;以及直方图状态监视装置500,其被配置为实时监测直方图的状态,并且根据监测结果停止打光,输出直方图。
30.具体地,spad像素阵列100输出的脉冲信号通过例如or门或xor门的门电路200被连接在一起后发送到tdc 300。
31.图2示出了根据本公开另一实施例的飞行时间测距传感器,为了更清楚地描述附图,其中与图1中相同的部分的描述将被省略。参考图2,直方图生成装置400被配置为将tdc 300记录的数值作为直方图存储器510的地址值,读取对应地址所存储的数据并加1,并且将相加之后的数值写回对应地址以生成直方图信息。
32.直方图状态监视装置500读取存储在直方图存储器510中的值。参见图2,直方图状态监视装置500被配置为包括第一寄存器521、第二寄存器522和比较器531。
33.其中,第一寄存器521存储预先设定的第一阈值,并且第二寄存器522存储与当前tdc记录的数值对应的地址的直方图存储器510的值;并且比较器531比较第一寄存器521和第二寄存器522的值,并且基于比较结果,当第二寄存器522的值大于第一寄存器521的值时,发出指令,停止打光,开始处理直方图;并且当第二寄存器522的值小于第一寄存器521的值时,重复上述过程。
34.图3示出了根据本公开另一实施例的飞行时间测距传感器,为了更清楚地描述附图,其中与图1中相同的部分的描述将被省略。参考图3,直方图状态监视装置500被配置为包括计数器540,所述计数器540被配置为用于对打光次数进行计数,并且当计数值达到第二阈值时,启动直方图状态监视装置500。
35.进一步地,直方图状态监视装置500被配置为包括第三寄存器523和比较器532,所述第三寄存器523被配置为存储与当前tdc记录的值对应的地址的直方图存储器510的值,并且所述比较器532比较第三寄存器523的值和根据计数器540的计数值计算的第三阈值,并且根据比较结果,当第三寄存器523的值大于根据计数器540的计数值计算的第三阈值时,发出指令,停止打光,开始处理直方图;并且当第三寄存器523的值小于第三阈值时,重复上述过程。
36.图4示出了根据本公开另一实施例的飞行时间测距传感器,为了更清楚地描述附图,其中与图1中相同的部分的描述将被省略。参考图4,直方图状态监视装置500被配置为包括第四寄存器524、第五寄存器525和处理器550,所述第四寄存器524存储直方图存储器510中的第一个地址值对应的数据,所述第五寄存器525存储对应于与tdc记录的值对应的地址的直方图存储器510中的值中最大的值,并且所述处理器550根据第四寄存器524中的值和第五寄存器525中存储的值以及与第五寄存器525中存储的值相对应的地址值来计算信噪比。
37.具体地,当tdc 300计时开始时刻早于打光时刻时,第一个地址值对应感测到的光子只能来源于背景光,因此,该地址值对应的值可以表征背景光的强度。
38.例如,此时背景光光子数是n,第一个地址值对应的时间宽是t,spad像素击穿的概率为:
[0039]1‑
e
‑
n
×
t
×
pde
ꢀꢀꢀ
公式1
[0040]
经历m次测量之后,第一个地址值对应的数据的期望值为:
[0041]
m
×
(1
‑
e
‑
n
×
t
×
pde
)
ꢀꢀꢀ
公式2
[0042]
因此,第一个地址值对应的数据可以表征背景光的强度。
[0043]
此外,用bin[0]代表第一个地址值“0”对应的数据,并且用bin[k]代表地址“k”处的直方图存储器510中的最大值对应的数据,则信噪比通过以下计算公式得到:
[0044][0045]
其中,f(k)是与k相关的函数。
[0046]
根据本发明的实施例,飞行时间测距传感器可以根据计算的信噪比调整打光,包括:当信噪比高于预设水平时,停止打光,输出直方图。
[0047]
图5示出了根据本公开实施例的控制飞行时间测距传感器的方法,所述方法包括以下步骤:控制开始打光,通过spad像素矩阵检测光子的入射并输出脉冲信号;通过tdc记录与输出脉冲信号的时刻相关的信息;通过直方图生成装置基于与输出脉冲信号的时刻相关的信息生成直方图信息;以及通过直方图状态监视装置实时监测直方图的状态,并且根据监测结果停止打光,输出直方图。
[0048]
文本和附图仅作为示例提供,以帮助理解本公开。它们不应被解释为以任何方式限制本公开的范围。尽管已经提供了某些实施例和示例,但是基于本文所公开的内容,对于本领域技术人员而言显而易见的是,在不脱离本公开的范围的情况下,可以对所示的实施例和示例进行改变。
[0049]
根据本公开的实施例,提供了一种包括直方图状态监视装置的飞行时间测距传感器,其通过实时监测直方图的状态,判断是否需要停止打光,从而缩短曝光时间,降低整体
功耗;此外,根据本发明实施例的飞行时间测距传感器还能够表征当前测试环境的光学条件,从而动态地控制系统。
[0050]
尽管已经用示例性实施例描述了本公开,但是可以向本领域技术人员建议各种改变和修改。本公开旨在涵盖落入所附权利要求范围内的这种改变和修改。
[0051]
本发明中的任何描述都不应被理解为暗示任何特定的元件、步骤或功能是必须包括在权利要求范围内的必要元件。专利主题的范围仅由权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1