基于现实增强空间中多特征定位方法与流程
1.本发明涉及现实增强技术领域,尤其涉及一种基于现实增强空间中多特征定位方法。
背景技术:
2.在现实增强设备中启动程序时每次程序启动会以启动程序时的设备位置为辐射范围创建一个坐标系统,这使现实增强空间中虚拟物体会根据程序的启动位置而发生改变.使得我们每次启动程序都需要人工调整实增强空间中虚拟物体的位置进行校准.。
3.现有的现实增强设备每次启动程序都需要进程复杂的人工调整.耗费了大量的重复时间。
技术实现要素:
4.本发明的目的在于提供一种基于现实增强空间中多特征定位方法,旨在解决现有技术中现实增强设备每次启动程序都需要进程复杂的人工调整.耗费了大量的重复时间的技术问题。
5.为实现上述目的,本发明提供了一种基于现实增强空间中多特征定位方法,包括如下步骤:
6.通过现实增强程序选取虚拟物体的中心位置作为中心点,并以该中心点建立三维坐标系;
7.对现实物体对应的三个面分别添加定位特征,通过现实增强空间中的所述三维坐标系,获得定位特征的三维坐标以及法向量;
8.通过现实增强程序计算现实物体三个面的相交点,并通过三个法向量进行矩阵换算出虚拟物体的方向;
9.通过将现实增强空间中的虚拟物体和现实物体进行重叠实现现实增加空间里模型的位置校准。
10.其中,所述现实增强程序包括采集模块、转换模块和叠加模块,所述采集模块通过摄像头获得现实环境,所述转换模块用于建立三维坐标系并计算数据,所述叠加模块用于重叠虚拟物体和现实物体。
11.其中,每个面上至少设置有一个所述定位特征,所述定位特征为特征点或特征图,并通过图像传感器进行识别。
12.其中,现实物体选取三个互相垂直的定位面,并在定位面设置定位特征。
13.其中,所述采集模块通过图像传感器从接受的图像中识别特征点的位置,通过识别出的位置计算出相交点。
14.其中,通过相交点和中心点的距离差,通过所述叠加模块将中心点与所述相交点重合,从而实现现实增强空间里模型的位置校准。
15.本发明的一种基于现实增强空间中多特征定位方法,在固定的场景中,对现实物
体进行提前设置定位特征,并通过三个不同面的定位特征,获得虚拟物体距离所述采集模块的距离以及相对方向,从而计算出中心点与相交点之间的距离,利用所述叠加模块对虚拟物体和现实物体重合,不需要人工进行过多的调整,只需要识别规定好的特征点、特征图就可以自动校准位置.且定位通过多面定点的方式大大降低了定位偏差问题。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本发明提供的基于现实增强空间中多特征定位方法的步骤流程图。
具体实施方式
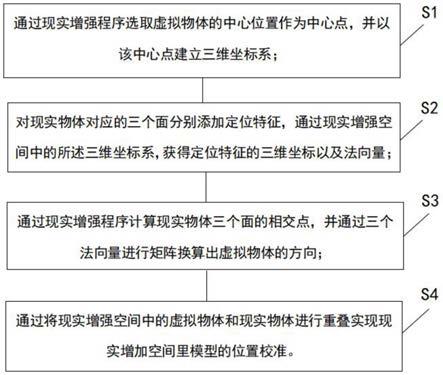
18.请参阅图1,本发明提供一种基于现实增强空间中多特征定位方法,包括如下步骤:
19.s1:通过现实增强程序选取虚拟物体的中心位置作为中心点,并以该中心点建立三维坐标系;
20.s2:对现实物体对应的三个面分别添加定位特征,通过现实增强空间中的所述三维坐标系,获得定位特征的三维坐标以及法向量;
21.s3:通过现实增强程序计算现实物体三个面的相交点,并通过三个法向量进行矩阵换算出虚拟物体的方向;
22.s4:通过将现实增强空间中的虚拟物体和现实物体进行重叠实现现实增加空间里模型的位置校准。
23.其中在步骤s1中,所述现实增强程序包括采集模块、转换模块和叠加模块,所述采集模块通过摄像头获得现实环境,所述转换模块用于建立三维坐标系并计算数据,所述叠加模块用于重叠虚拟物体和现实物体,通过中心点建立三维坐标系,三维坐标系形成三个互相垂直的基准面,并获得基准面对应的法向量;
24.在步骤s2中,现实物体选取三个互相垂直的定位面,每个定位面上至少设置有一个所述定位特征,所述定位特征为特征点或特征图,并通过图像传感器进行识别;
25.在步骤s3中,所述采集模块通过图像传感器从接受的图像中识别特征点的位置,通过位置信号计算出相交点,并通过定位面的数据进行计算,通过克莱姆法则进行矩阵计算:
[0026][0027]
通过矩形计算可获得虚拟物体的方向;
[0028]
在步骤s4中,利用所述叠加模块对虚拟物体和现实物体重合,不需要人工进行过
多的调整,只需要识别规定好的特征点、特征图就可以自动校准位置.且定位通过多面定点的方式大大降低了定位偏差问题,所述采集模块设置于外部设备,人体穿戴外部设备后进行采集信息,以人体作为转动中心,人体转向时获得转动角度,所述叠加模块根据转动角度直接调节虚拟物体的位置,持续进行调节。
[0029]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
技术特征:
1.一种基于现实增强空间中多特征定位方法,其特征在于,包括如下步骤:通过现实增强程序选取虚拟物体的中心位置作为中心点,并以该中心点建立三维坐标系;对现实物体对应的三个面分别添加定位特征,通过现实增强空间中的所述三维坐标系,获得定位特征的三维坐标以及法向量;通过现实增强程序计算现实物体三个面的相交点,并通过三个法向量进行矩阵换算出虚拟物体的方向;通过将现实增强空间中的虚拟物体和现实物体进行重叠实现现实增加空间里模型的位置校准。2.如权利要求1所述的基于现实增强空间中多特征定位方法,其特征在于,在通过现实增强程序选取虚拟物体的中心位置作为中心点,并以该中心点建立三维坐标系的步骤中:所述现实增强程序包括采集模块、转换模块和叠加模块,所述采集模块通过摄像头获得现实环境,所述转换模块用于建立三维坐标系并计算数据,所述叠加模块用于重叠虚拟物体和现实物体。3.如权利要求2所述的基于现实增强空间中多特征定位方法,其特征在于,在对现实物体对应的三个面分别添加定位特征,通过现实增强空间中的所述三维坐标系,获得定位特征的三维坐标以及法向量的步骤中:每个面上至少设置有一个所述定位特征,所述定位特征为特征点或特征图,并通过图像传感器进行识别。4.如权利要求3所述的基于现实增强空间中多特征定位方法,其特征在于,在对现实物体对应的三个面分别添加定位特征,通过现实增强空间中的所述三维坐标系,获得定位特征的三维坐标以及法向量的步骤中:现实物体选取三个互相垂直的定位面,并在定位面设置定位特征。5.如权利要求4所述的基于现实增强空间中多特征定位方法,其特征在于,在通过现实增强程序计算现实物体三个面的相交点,并通过三个法向量进行矩阵换算出虚拟物体的方向的步骤中:所述采集模块通过图像传感器从接受的图像中识别特征点的位置,通过识别出的位置计算出相交点。6.如权利要求5所述的基于现实增强空间中多特征定位方法,其特征在于,在通过将现实增强空间中的虚拟物体和现实物体进行重叠实现现实增加空间里模型的位置校准的步骤中:通过相交点和中心点的距离差,通过所述叠加模块将中心点与所述相交点重合,从而实现现实增强空间里模型的位置校准。
技术总结
本发明涉及现实增强技术领域,具体涉及一种基于现实增强空间中多特征定位方法;在固定的场景中,对现实物体进行提前设置定位特征,并通过三个不同面的定位特征,获得虚拟物体距离采集模块的距离以及相对方向,从而计算出中心点与相交点之间的距离,利用叠加模块对虚拟物体和现实物体重合,不需要人工进行过多的调整,只需要识别规定好的特征点、特征图就可以自动校准位置.且定位通过多面定点的方式大大降低了定位偏差问题。降低了定位偏差问题。降低了定位偏差问题。
技术研发人员:夏露桂 陈磊 姜伟 杨江
受保护的技术使用者:米茂(上海)数字技术有限公司
技术研发日:2021.09.07
技术公布日:2021/12/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1