一种基于双光频梳的三维固态激光雷达探测方法及装置与流程
1.本发明涉及一种固态激光雷达探测方法,尤其涉及一种基于双光频梳的三维固态激光雷达探测方法及装置。
背景技术:
2.激光雷达可实现高精度三维感知,广泛应用于自动驾驶、智能机器人、遥感等领域。目前发展较为成熟的激光雷达系统多采用机械扫描结合脉冲时间到达技术获取探测目标的三维/二维空间分布信息,(参见[t. raj, f. hashim, a. huddin, etc, " a survey on lidar scanning mechanisms," electronics, vol. 9, no. 5, pp. 741,2020.])。由于机械旋转部件结构复杂,抗震动性差,易磨损等原因,导致机械式激光雷达寿命受限,且安装校准过程繁琐,体积庞大,因而在消费级应用场景受限。与此同时,基于集成光相控阵、光晶体波导、色散介质等机理的固态波束控制技术也在快速发展。采用电控/热控实现激光波束的快速扫描,与机械扫描相比具有更好的稳定性,且系统紧凑 (参见[s. miller, y. phare, m. shin, etc, " large
‑
scale optical phased array using a low
‑
power multi
‑
pass silicon photonic platform," optica, vol. 7, no. 1, pp. 3
‑
6, 2020.])。虽然相关技术目前主要还处于实验室研究阶段,但固态波束控制技术因其潜在的优越特性,吸引着学术及产业界解决其在新需求下的技术难点,特别是联合调频连续波外差法的固态波束扫描方案。发明(参见[郭清水,尹坤,吉晨,刘硕,“一种基于rotman光透镜的固态激光雷达探测方法及装置”,cn113433556a.])提出了一种解决思路,基于线性调频连续波外调制光频梳实现高线性、参数灵活可调、子带信号一致性好的宽带扫频光频梳信号产生,并基于频率(波长)色散
‑
方向映射与rotman光透镜的通道
‑
方向映射关系,实现目标空间三维分布及速度等信息的获取。但此方案在接收部分需要信号采集阵列及光电探测器阵列,致使大规模多通道探测时接收部分结构复杂、成本高。
技术实现要素:
[0003]
本发明所要解决的技术问题在于:克服现有技术不足,基于光频梳色散机理,实现频率复用光扫频信号光波束的一维扫描,并基于rotman光透镜通道
‑
波束角度映射机理实现光波束另一个维度的扫描,从而实现目标三维空间信息的获取;在激光雷达接收机部分,基于相干接收及差频复用,两个探测器即可实现所有通道数据的同时接收。整个系统纯固态,无需机械扫描控制波束方向,系统可一体化集成。
[0004]
本发明具体采用以下技术方案解决上述技术问题:一种基于双光频梳的三维固态激光雷达探测方法,该方法具体为:将周期为t的中频线性扫频信号分别通过马赫
‑
曾德尔调制器对两个重复频率不同的光频梳调制,得到两个扫频光频梳信号;其中一路作为参考光信号,另一路作为探测光信号送入1
×
n路光开关;1
×
n路光开关输出端口与rotman光透镜的n个输入端口一一连接,并依次选通;选通的rotman光透镜的第j个输入端口的探测光信号通过rotman光透镜后端
光天线在
ϕ
平面
ϕ
j
角度辐射到空间中,同时,rotman光透镜后端光天线控制探测光信号不同梳齿扫频子信号波束在垂直于
ϕ
平面的θ平面上同时指向2m+1(m为单边光频梳梳齿个数)个不同方向,得到2m+1个指向不同方向的探测子光信号;探测子光信号遇到目标后反射回光天线得到接收光信号,接收光信号与参考光信号完成相干检测得到携带目标信息的复中频信号;对复中频信号进行信号采集后,基于雷达信号算法获取目标θ平面角度、距离二维空间分布及速度信息。
[0005]
优选地,所述两个重复频率不同的光频梳中心频率相同,且重复频率大于中频线性扫频信号的最高频率,通过偏置点控制使马赫
‑
曾德尔调制器工作在最小工作点,两个光频梳分别实现抑制载波调制;所述扫频光频梳信号的扫频子信号由同一梳齿对应的正负一阶边带组成,且作为探测光信号的扫频光频梳信号的扫频子信号内正一阶边带对应的目标多普勒频移依据四舍五入进行计算约等于负一阶边带对应的目标多普勒频移。
[0006]
进一步地,所述携带目标信息的复中频信号由一系列位于[(m
‑
1/2)
∙∆
f
pfr
,(m+1/2)
∙∆
f
pfr
]内的复单频信号组成,其中m=
‑
m,
ꢀ‑
m+1,
…
,m
‑
1,m; m为单边光频梳梳齿个数,
∆
f
pfr
为双光频梳的重复频率差。
[0007]
进一步地,所述rotman光透镜及后端光天线为平面光波导结构,rotman光透镜及后端光天线在同一平面一体化集成,且平面
ϕ
平行于该平面;所述rotman光透镜控制进入其输入端口的扫频光频梳信号通过后端光天线首先在
ϕ
平面指向
ϕ
j
, j=1,2,
…
,n,同时基于光天线的频率色散机理,光频梳不同梳齿扫频子信号同时通过光天线后,光波束在垂直于
ϕ
平面的θ平面同时分别指向θ
i
, i=1,2,
…
,2m+1,m为单边光频梳梳齿个数,实现θ平面中一维波束扫描,遇到目标的反射信号同时由光天线接收。
[0008]
根据相同的发明思路还可以得到以下技术方案:一种基于双光频梳的三维固态激光雷达探测装置,包括:双光频梳源,用于生成两个相干的分别包含2m+1个梳齿的第一、第二光频梳信号;其中,m为单边光频梳梳齿个数;扫频源,用于产生周期为t的中频线性扫频信号;第一马赫
‑
曾德尔调制器,用于将中频线性扫频信号抑制载波调制到第一光频梳上得到探测光信号;第二马赫
‑
曾德尔调制器,用于将中频线性扫频信号抑制载波调制到第二光频梳上得到参考光信号;光放大器,用于放大探测光信号;光环形器,所述光环形器包括三个端口,其中,第一端口接收光放大器输出的探测光信号,通过第二端口输入到1
×
n路光开关,并将1
×
n路光开关返回的目标反射信号通过第三端口送入相干探测单元的一个输入端口;1
×
n路光开关,用于依次将探测光信号依次送入rotman光透镜天线的n个输入端口,并依次将rotman光透镜天线接收的目标反射信号返回到光环形器的第二端口;rotman光透镜天线,用于依次将1
×
n路光开关送入的探测光信号辐射到空间中,并依次接收目标反射信号,并返回到rotman光透镜天线对应输入端口;根据不同通道及不同探测信号频率,控制波束在二维空间扫描;控制单元,用于控制第一、第二马赫
‑
曾德尔调制器使其工作在最小偏置点,并根
据中频线性扫频信号的扫频周期控制1
×
n路光开关工作时序;相干探测单元,用于基于参考光信号对目标反射信号进行相干检测,得到携带目标信息的复中频信号;信号采集处理单元,用于对复中频电信号进行模数转换,并进行固态激光雷达数字信号处理,提取获得目标信息。
[0009]
进一步地,所述双光频梳源包括:第一光频梳源,用于生成第一光频梳信号;第二光频梳源,用于生成第二光频梳信号;同步源,用于同步第一光频梳与第二光频梳,保证两个光频梳信号之间相干。
[0010]
优选地,第一、第二光频梳源为飞秒激光器、主动/被动锁模激光器、光频梳产生器、微谐振腔或单频信号源外调制电光调制器的组合设备;产生的第一、第二光频梳信号中心频率相同,重复频率不同,且重复频率大于中频线性扫频信号的最高频率。
[0011]
进一步地,所述rotman光透镜天线由rotman光透镜及将rotman光透镜输出光信号耦合入空间的光栅天线组成;rotman光透镜与光栅天线为平面波导结构。
[0012]
相比现有技术,本发明技术方案具有以下有益效果:1) 本发明通过频率色散技术实现光波束一个维度的扫描,单个光天线即可实现激光频率
‑
探测角度映射,基于双光频梳差频复用相干探测技术在单个探测单元可实现接收光频梳信号的同时探测,并实现中频信号
‑
探测角度映射;单个周期即可并行实现目标距离、速度、一维角度等信息的高精度获取。
[0013]
2) 本发明基于rotman光透镜通道选择技术实现空间波束另一个维度的扫描,通过通道切换即可实现信号时间(rotman光透镜输入通道)
‑
探测角度映射,并最终通过信号不同周期
‑
探测角度映射实现目标另一个维度角度信息的获取;方案扫描速度快,简单无需机械扫描,结合频率(波长)
‑
探测角度映射可实现目标三维空间及速度信息获取。
[0014]
3) 本发明探测光信号基于锯齿形线性扫频信号抑制载波调制光频梳生成,单个扫频周期内结合正负边带即可实现目标的距离、角度信息获取,相比传统三角形线性扫频可提高探测时效一倍。
附图说明
[0015]
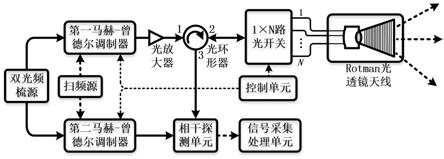
图1为本发明固态激光雷达系统的结构示意图;图2为本发明固态激光雷达系统一个具体实施例的结构示意图;图3为本发明固态激光雷达系统一个具体实施例中第1个扫频周期发射扫频光信号、目标反射信号、探测角度、复中频电信号等彼此之间的映射关系图;图4为本发明固态激光雷达系统一个具体实施例中第n个扫频周期发射扫频光信号、目标反射信号、探测角度、复中频电信号等彼此之间的映射关系图。
具体实施方式
[0016]
针对现有技术不足,本发明基于双光频梳频率复用与rotman光透镜通道选择激光波束控制技术实现目标二维角度信息获取,基于调频连续波雷达探测技术实现高分辨率目标距离与速度信息的获取。系统简单紧凑,无需机械扫描即可同时实现目标三维分布及速
度信息的获取,可大大提高激光雷达系统的工作效率。
[0017]
一种基于rotman光透镜的固态激光雷达探测装置,如图1所示,包括双光频梳源、第一马赫
‑
曾德尔调制器、第二马赫
‑
曾德尔调制器、扫频源、光放大器、光环形器、1
×
n路光开关、rotman光透镜天线、控制单元、相干探测单元和信号采集处理单元。
[0018]
其中,所述双光频梳源可以通过以下方法实现:同步源同步两个中心频率相同,重复频率不同的光频梳源,其中光频梳源可以是飞秒激光器、主动/被动锁模激光器、光频梳产生器、微谐振腔或单频信号源外调制电光调制器的组合设备,本方案优选参考源同步两个锁模激光器。
[0019]
首先,扫频源产生的周期为t的中频线性扫频信号分别通过两个马赫
‑
曾德尔调制器对两个重复频率不同的光频梳调制,得到两个扫频光频梳信号;其中一路作为参考光信号,另一路作为探测光信号经光放大器和光环形器后送入1
×
n路光开关;光开关输出端口与rotman光透镜的n个输入端口一一连接,并依次选通;选通的rotman光透镜的第j个输入端口的探测光信号通过rotman光透镜后端光天线在
ϕ
平面
ϕ
j
角度辐射到空间中,同时,rotman光透镜后端光天线控制探测光信号不同梳齿扫频子信号波束在垂直于
ϕ
平面的θ平面上同时指向2m+1个不同方向,得到2m+1个指向不同方向的探测子光信号;探测子光信号遇到目标后反射回光天线得到接收光信号,接收光信号经光环形器后在相干探测单元中与参考光信号完成相干检测得到携带目标信息的复中频信号;信号采集处理单元采集信号后,基于雷达信号算法获取目标θ平面角度、距离二维空间分布及速度信息;而后续依次送入rotman透镜其它输入端口的探测光信号与第一输入端口同理,通过rotman透镜后端光天线依次在
ϕ
平面
ϕ
j
角度分散辐射到空间中,完成rotman所有透镜输入端口切换后,即可实现目标
ϕ
平面角度、θ平面角度、距离三维空间分布及速度信息。
[0020]
为了便于公众理解,下面通过一个具体实施例来对本发明的技术方案进行详细说明:如图2所示,本实施例的固态激光雷达探测系统包括:1个同步源、1个扫频源、2个锁模激光器、2个马赫
‑
曾德尔调制器、1个光放大器、1个光环形器、1个1
×
n路光开关、1个相干探测单元、1个rotman光透镜天线、1个信号采集处理单元、1个控制单元。其中,所述相干探测单元由一个光90度耦合器和1对平衡探测器组成。
[0021]
首先第一锁模激光器与第二锁模激光器分别输出中心频率相同,重复频率分别为f
prf1
与f
prf2
的光脉冲(光频梳),两个光频梳的重复频率差为
∆
f
prf
(假设f
prf1
大于f
prf2
)。通过同步源同步后,第一锁模激光器输出光频梳信号频谱由 f
s
+if
prf1 (i=
‑
m,
‑
m+1,
…
,m)分量组成,第二锁模激光器输出光频梳信号频谱由f
s
+if
prf2 (i=
‑
m,
‑
m+1,
…
,m)分量组成,其中m为单边光频梳梳齿个数,f
s
为光频梳中心频率。将两个光频梳分别送入两个工作在最小偏置点的马赫
‑
曾德尔调制器,扫频源输出瞬时频率为f
lfm
= f0+kt的中频线性扫频信号分别通过第一、第二马赫
‑
曾德尔调制器对两个光频梳进行调制,在第一马赫马赫
‑
曾德尔调制器输出端得到探测光信号,在第二马赫马赫
‑
曾德尔调制器输出端得到参考光信号。其中探测光信号s
comb1
(t)具体可以表示为:s
comb1
(t)=a
i_d1
exp[j2π(f
s
t+if
prf1
t
‑
( f0t+0.5kt2))]+ a
i_u1 exp[j2π(f
s
t+if
prf1
t+(f0t+0.5kt2)]
ꢀꢀꢀꢀꢀ
(1)
其中a
i_d1
与a
i_u1 (i=
‑
m,
‑
m+1,
…
,m)为探测光信号不同扫频梳齿信号的幅度,下标d表示扫频梳齿信号的负一阶边带,u表示扫频梳齿信号的正一阶边带,0≤t≤t为时间,f0表示电线性调频信号的起始频率,k为其调频斜率,t为其周期。同样,参考光信号s
comb2
(t)具体可以表示为:s
comb2
(t) =a
i_d2 exp[j2π(f
s
t+if
prf2
t
‑
(f0t+0.5kt2))]+ a
i_u2 exp[j2π(f
s
t+if
prf2
t+(f0t+0.5kt2)]
ꢀꢀꢀ
(2)其中a
i_d2
与a
i_u2 (i=
‑
m,
‑
m+1,
…
,m)为参考光信号不同扫频梳齿信号的幅度,将参考光信号送入相干探测单元的光90度耦合器的一个输入端。
[0022]
探测光信号经过光放大器放大后送入光环形器第一端口1。光环形器第二端口2将其送入1
×
n路光开关,1
×
n路光开关的输出端口与包含n个输入端口的rotman光透镜天线(rotman光透镜天线由rotman光透镜及其后端光天线组成)一一连接。首先光开关选择第一路为通路,从而探测光信号通过光开关送入rotman光透镜的第1个输入端口。基于rotman 透镜的工作原理,rotman光透镜可控制输入其1端口的探测光信号通过光天线波束在
ϕ
平面指向角度
ϕ1,
ϕ
平面与rotman光透镜平面所在平面平行。同时,rotman光透镜后端光天线通过参数设计,基于频率与角度存在与色散相关的映射关系,光天线控制扫频光频梳探测光信号不同梳齿扫频子信号同时在θ平面射向不同方向θ
i
(i=
‑
m,
‑
m+1,
…
,m),角度θ
i
与扫频子信号存在映射关系,θ平面与
ϕ
平面垂直正交。射向空间中的探测光信号遇到目标后发生反射,目标反射信号同时经光天线接收后通过rotman光透镜及1
×
n光开关送入光环形器第二端口2,光环形器第三端口3将目标反射信号送入相干探测单元光的90度耦合器的另一个输入端与参考光信号实现相干接收。设角度为θ
i
的探测光信号探测到目标,对应子信号的目标反射信号与参考光信号延时差为τ
i
。对应目标的速度为v
i
,考虑到探测光信号同一梳齿对应的正负边带波长相差很小,目标运动引入的多普勒频移可近似相等为f
d_i
。则目标反射信号可以表示为:s
combr
(t) =a
i_dr exp{j2π[f
s
(t
‑
τ
i
)+if
prf1
(t
‑
τ
i
)
‑
( f0(t
‑
τ
i
)+0.5k(t
‑
τ
i
)2)+ f
d_i
t]}+a i_ur exp{j2π[f
s
(t
‑
τ
i
)+if
prf1
(t
‑
τ
i
)+( f0(t
‑
τ
i
)+0.5k(t
‑
τ
i
)2)+ f
d_i
t]}
ꢀꢀꢀꢀ
(3)其中a
i_dr
与a
i_ur (i=
‑
m,
‑
m+1,
…
,m)为目标反射信号子信号幅度。相干接收单元的光90度光耦合器输出信号可以表示为:
ꢀꢀꢀꢀꢀꢀ
(4)s
i+
(t)、s
i
‑
(t)、s
q+
(t)、s
q
‑
(t)分别为90度光耦合器输出的四路光信号,将90度光耦合器输出的四路光信号分别送入两个平衡光电探测器完成光电转换,忽略寄生相位,相干探测单元输出得到的中频电信号可以表示为:
ꢀ
(5)即携带目标信息中频信号的两个正交分量s
i
(t)、s
q
(t),其中为中频信号的相位信息,对应信号复数形式为:s
ili
(t) =a ri_u
exp[j2π(
‑
kτ
i
t+i
∆
f
prf
t +f
d_i
t +)] +a ri_d
exp[j2π(kτ
i
t+i
∆
f
prf
t +f
d_i
t +)] (6)其中a
ri_u
与a
ri_u
为子信号中频电信号的幅度,对此信号进行采集,并进行通道角度映射及距离维信息提取,即可获取目标θ平面角度、距离二维空间分布及速度信息。为便于理解,图3详细描绘了第一个周期目标距离信息及角度信息的测量原理及扫频光频梳探测信号频率
‑
角度的映射关系。
[0023]
控制单元控制1
×
n路光开关根据扫频周期t依次选通rotman光透镜其他端口,依次将探测光信号送入rotman 光透镜的其他输入端口,rotman光透镜可控制输入其它端口的探测光信号通过光天线波束在
ϕ
平面依次指向角度
ϕ
j
(j=2,3,
…
,n),实现波束的另一个维度依次扫描,图4详细描绘了第n个周期目标距离信息及角度信息的测量原理及扫频光频梳探测信号频率
‑
角度的映射关系。在完成持续时间为nt的整个二维扫描后,通过信号重组及处理,即可实现目标
ϕ
平面角度、θ平面角度、距离三维空间分布及速度信息。
[0024]
最后,需要注意的是,以上列举的仅是本发明的具体实施例。本发明不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1