基于LOD-ICA的旋转机械故障诊断方法
基于lod
‑
ica的旋转机械故障诊断方法
技术领域
1.本发明涉及旋转机械故障信号处理和故障诊断领域,特别涉及基于盲源分离的旋转机械故障诊断方法。
背景技术:
2.旋转机械的故障诊断技术的研究对于提高工作效率甚至社会生产力、生命安全以及国家经济建设都具有重要意义。
3.大型旋转机械出现故障的时候,很多情况下无法预先知道故障信号特征,需要采用盲源分离的方法进行诊断。独立分量分析(independent component analysis,ica)方法在处理源信号的盲源分离问题和在图形信号处理与分析领域应用广泛,而快速ica方法以其更快的收敛速度要优于ica方法,但快速ica方法与ica方法一样都存在观测数据通道不足的缺陷。在观测通道数不足的情况下,独立分量分析,需要利用其他分解方法构建虚拟通道数据,以实现各独立信号源的分离。
技术实现要素:
4.本发明要解决的技术问题是:通过lod(local oscillatory
‑
characteristic decomposition)方法对故障信号进行预处理,为ica方法提供足够的虚拟通道数据;在拥有足够多观测通道情况下,利用ica算法解决lod方法存在的模态混肴问题,以实现信号的盲源分离。
5.本发明采用的技术方案是:基于lod
‑
ica的旋转机械故障诊断方法,通过基于噪声辅助分析的lod方法对故障振动信号进行预处理,为快速ica方法提供足够的虚拟通道数据;其次,在拥有足够多观测通道情况下,以快速ica算法可以解决基于白噪声辅助分析的lod方法存在的模态混肴问题,以实现信号的盲源分离;最后,成功提取出混合信号的故障特征。
6.lod方法基于信号的局部特征时标,并且通过微分、坐标域变换和分段线性变换等操作,将信号分解为一系列单振荡分量mocs,其瞬时频率具有物理意义和残基。该方法计算效率很高,更适合实时在线处理和数据分析。
7.进一步的,本发明基于快速ica方法和基于白噪声辅助分析的lod方法的结合,充分发挥两种方法彼此处理信号的优势,增强了混合故障振动信号特征提取的精确性。
8.进一步的,本发明实现故障振动信号特征提取的具体步骤包括:
9.步骤1:保存采集的旋转机械故障混合信号;
10.步骤2:建立任意两相邻极值点区间的分段线性函数,通过坐标域变换将信号从原始数据域坐变换为锯齿域坐标;
11.步骤3:对一阶微分信号添加白噪声,求得锯齿域的初始均值函数,进而求得高频波动函数,再通过坐标域变换运算,将高频波动函数转换为原始域高频函数;
12.步骤4:鉴别分离出来的信号单分量c1(t)是否含有不同的波动特征,即其瞬时频
(t),因此判定原始信号x(t)的第1个moc分量moc1(t)为信号c1(t);实际情况下,假使分离出来的信号分量c1(t)是含有不同的波动特征,即其瞬时频率不具有物理意义的一个单分量信号,则循环运算以上步骤m次,最终分离出来的第一个瞬时频率具有物理意义的单分量信号c
m
将被判定为原始信号中的第1个moc分量moc1(t)。
31.其中,所述步骤4的具体过程为:通过剥离出原始信号x(t)里的单分量信号moc1(t)来创造出一个全新的信号函数r1(t),将函数r1(t)视为新的原始信号重新带入lod算法中,通过以上步骤的循环运算,n次后会得到有且仅有一个单调函数r
n
(t),最终通过lod方法对信号的分解,会以n个moc分量及残差r
n
(t)相加总和构成原始信号x(t)的形式存在。
32.进一步的,所述进行实现故障振动信号特征提取关键步骤在于,利用快速ica算法,依据负熵来建立起目标函数,通过经典的牛顿迭代进行优化,实现混合信号盲源分离。
33.本发明的有益效果是:对于lmd算法,使用移动平均值来导出局部均值函数和包络估计函数会导致大量计算。相比于lmd算法,lod算法具有更高的数据处理速度,更快的计算效率,更加精确的分解结果。基于emd方法而言,其自身计算量,甚至存在的末端效应,过冲和下冲,以及由希尔伯特变换产生的无法解释的负频率等问题并没有在ica算法的加入后而取得良好的改善效果。所以根据上述内容,lod算法在信号处理方面较之emd、lmd都有较大优势。添加了白噪声的lod方法与快速ica方法相互结合产生的新方法
‑
lod
‑
ica方法可以将原始的混合信号波形很好的分离还原出来,成功实现混合信号的盲源分离。且与添加白噪声的lod方法相比较,在混合信号故障特征提取方面,lod
‑
ica新方法具有更好的效果。因此提出了一种新的时频分析方法一lod
‑
ica算法,结合添加了白噪声的lod和快速ica两种算法的优点,克服各自的不足,实现旋转机械设备的故障监测与诊断。
附图说明
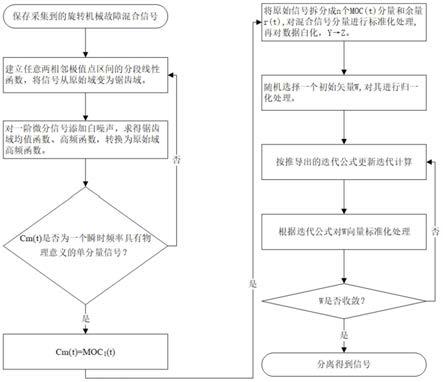
34.图1为算法的流程图;
35.图2为实施例中故障信号时域图;
36.图3为实施例中故障信号频谱图;
37.图4为实施例中故障信号基于噪声辅助分析的lod分解时频图;
38.图5为实施例中故障信号基于噪声辅助的lod分解频谱图;
39.图6为实施例中混合信号分量快速ica分解时频图;
40.图7为实施例中混合信号分量快速ica频谱图。
具体实施方式
41.本发明将添加了白噪声的lod方法与快速ica方法结合,提出了可自适应分解混合信号的时频分析新方法
‑
lod
‑
ica方法,介绍了该方法以添加了白噪声的lod方法对故障混合信号进行预处理,为快速ica方法提供了充足的观测通道数据,进而使用快速ica方法实现混合信号盲源分离,完成故障信号特征提取。
42.算法例提供了一种故障信号特征提取方法,算法流程如图1所示,具体步骤如下:
43.步骤1:保存以风力机齿轮箱为代表大型旋转机械设备在实际运行时发生故障用接收机采集的混合信号x(t);
44.步骤2:找出信号x(t)中所有极值x
k
(k=1,2,...,m)及其对应的时刻值τ
k
,建立任
意两个相邻极值点[x
k
,x
k+1
)取值区间的分段线性函数s1(t),计算方法如式(1):
[0045][0046]
其中,x
k
(k=1,2,...,m)为x(t)中所有的极值;t表示时间;x
k+1
为x
k
的相邻极值点;τ
k
、τ
k+1
分别x
k
、x
k+1
对应的时刻值;对原始信号x(t)在任意两个相邻极值点[x
k
,x
k+1
)的信号区间进行分段线性变换运算,以获得分段线性函数s1(t)。
[0047]
步骤3:通过原始信号x(t)的坐标域变换运算,对原始数据坐标域坐标(t,x)进行坐标转换,变换方式如式(2)、(3)所示:
[0048][0049]
s(u)=x(t)
ꢀꢀ
(3)
[0050]
转换后的锯齿域坐标(u,s)极大的减小了分解误差。
[0051]
步骤4:对信号x(t)进行微分运算处理,将白噪声添加到信号x(t)一阶微分处理得到的函数x
′
(t)中;
[0052]
步骤5:找出x
′
(t)的每个极值点处所对应的时刻值τ
k
′
(k=1,2,...,n),进而通过时刻值τ
k
得到原始信号x(t)中相对应的函数值x
k
′
;接着,对锯齿域的函数值x
k
′
进行分段线性变换运算,通过线性变换得到初始均值函数m1(u)。其中线性变换公式即将(1)式中的s1(t)、x
k
、x
k+1
、t、τ
k
、τ
k+1
、m分别替换为m1(u)、x
k
′
、x
k+1
′
、u、τ
k
′
、τ
k+1
′
、n。
[0053]
进而求高频波动函数,在锯齿域中,原始信号函数s1(u)与均值函数m1(u)的差值就是高频波动函数c1(u)。
[0054]
步骤6:通过坐标域变换运算,高频波动函数c1(u)的锯齿域坐标逆变换为原始数据域的坐标,从而得到原始域函数c1(t)。其中逆变换公式表示如下:
[0055][0056][0057]
步骤7:假使分离出来的信号分量c1(t)是含有不同的波动特征,即其瞬时频率不具有物理意义的一个单分量信号,则循环运算以上步骤m次,最终分离出来的第一个瞬时频率具有物理意义的单分量信号c
m
将被判定为原始信号中的第1个moc分量moc1(t)。
[0058]
步骤8:通过剥离出原始信号x(t)里的单分量信号moc1(t)来创造出一个全新的信号函数r1(t)。将函数r1(t)视为新的原始信号重新带入lod算法中,通过以上步骤的循环运算,n次后会得到有且仅有一个单调函数r
n
(t)。即,最终通过lod方法对信号的分解,会以n个moc分量及残差r
n
(t)相加总和构成原始信号x(t)的形式存在。即:
[0059][0060]
步骤9:对比分析分离出来的信号频谱图,将仍然存在信号模态混肴问题的moc分量进行标准化(均值为0,方差为1)处理,得到标准化向量y:
[0061]
步骤10:通过白化处理实现数据向量y
→
z的转变,y代表了独立分量分析分离出的
相应信号z是观测混合信号x进行标准化和白化处理之后的转换矩阵;
[0062]
步骤11:对随机生成的初始化单位范数向量w进行归一化处理;
[0063]
步骤12:根据推导出的迭代公式进行更新迭代计算;
[0064]
步骤13:根据迭代公式w=w
*
/||w
*
||对向量w进行标准化处理;
[0065]
步骤14:判断向量矩阵w是否收敛,若否,则重复步骤(12)
→
步骤(14);若是则进行下一步;
[0066]
步骤15:重新确立向量w进行对称正交化处理,保证分离出来的每个单位向量w互相独立正交,且线性无关;
[0067]
以下结合具体实例——风力机齿轮箱缺齿故障实验,来对实施例进一步阐述,实验使用西门子lms scadas数据采集系统,性能参数如表1所示,齿轮箱使用行星齿轮箱,行星齿轮箱参数如表2所示,特征频率如表3所示:
[0068]
表1西门子lms scadas数据采集系统的性能参数
[0069][0070]
表2行星齿轮箱参数
[0071][0072]
表3行星齿轮箱特征频率
[0073][0074]
实验时,测量30s时间内机器从0hz
‑
70hz暂态工况的数据;为使数据更加准确,每组数据测两次,在获得的数据中选取一组数据进行实验分析。采用的源信号为齿轮箱齿轮缺齿故障的音频信号。
[0075]
步骤1:采集齿轮箱齿轮缺齿故障的音频信号,图2为齿轮箱齿轮缺齿故障诊断振动信号时域波形图,图3是齿轮箱齿轮缺齿故障诊断振动信号频谱图。两图可以看出,采集到的齿轮箱故障信号是包含多种波动模式的振动混合信号,反映出其信号特征。
[0076]
步骤2:找出信号中所有极值及其对应的时刻值,建立任意两个相邻极值取值区间的分段线性函数。
[0077]
步骤3:通过坐标域变换将信号从原始数据域坐变换为锯齿域坐标。
[0078]
步骤4:对信号进行微分运算处理,将白噪声添加到信号一阶微分处理得到的函数中。
[0079]
步骤5:通过分段线性变换运算得到锯齿域的初始均值函数,进而求得高频波动函数。
[0080]
步骤6:通过坐标域变换运算,高频波动函数的锯齿域坐标逆变换为原始数据域的坐标,从而得到原始域函数。
[0081]
步骤7:鉴别分离出来的信号单分量c1(t)是否含有不同的波动特征,即其瞬时频率物理意义是否具有实质性,若是,则c1(t)=moc1(t);若否,最终分离出来首次瞬时频率物理意义具有实质性的单分量信号c
m
(t),c
m
(t)=moc1(t)。
[0082]
步骤8:在原始信号剥离出单分量信号moc1(t)再造新函数r0(t),通过以上步骤的循环运算,m次后得到有且仅有一个单调函数r
n
(t)。实现基于噪声辅助分析的lod方法的信号分解。结果如图4、图5所示,展示了添加白噪声的lod方法将齿轮箱故障振动信号分解成了7个moc分量和一个残基。
[0083]
步骤9:对比分析分离出来的信号频谱图,在1000至3000hz的主频段实验信号中,moc1、moc2和moc3三个分量中都分别含有两种及两种以上不同的波动状态,所以moc1、moc2和moc3三个分量分解未完全,将这三个moc分量进行标准化(均值为0,方差为1)处理,得到标准化向量y。
[0084]
步骤10:通过白化处理实现数据向量y
→
z的转变。
[0085]
步骤11:对随机生成的初始化单位范数向量w进行归一化处理。
[0086]
步骤12:根据推导出的迭代公式进行更新迭代计算。
[0087]
步骤13:根据迭代公式w=w
*
/||w
*
||对向量w进行标准化处理。
[0088]
步骤14:判断向量矩阵w是否收敛,若否,则重复步骤(12)
→
步骤(14);若是则进行下一步。
[0089]
步骤15:重新确立向量w进行对称正交化处理,保证分离出来的每个单位向量w互相独立正交,且线性无关。经步骤(9)
→
步骤(15)的快速ica算法处理后,未分解完全的分量信号分离的结果如图6、图7所示,混合信号分量中的高频信号与低频信号被分离开来,被分离出来的y1,y2和y3三个分量都是单分量信号,所以经快速ica方法分解产生的三个变量中任一变量都是具有同一波动状态的信号。
[0090]
综上所述,添加了白噪声的lod方法与快速ica方法相互结合产生的新方法
‑
lod
‑
ica方法可以将原始的混合信号波形很好的分离还原出来,成功实现混合信号的盲源分离。且与添加白噪声的lod方法相比较,在混合信号故障特征提取方面,lod
‑
ica新方法具有更好的效果。因此,lod
‑
ica新方法可以将混合信号分离开来,成功提取混合信号的故障特征提取,实现大型旋转机械设备的故障诊断。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1