一种称重装置及方法与流程
1.本发明属于称重技术领域,特别涉及一种称重装置及方法。
背景技术:
2.在生物培养过程中需要根据细胞或微生物的生理特性进行补料操作。为了控制补料的速率和总量,往往需要对补料瓶进行称重。称重过程中,补料瓶需要全程放置在称重装置上,不能移动,一旦移动就会影响称重的准确性,从而影响生物培养的结果。
3.但是,生物培养时间较长,少则十几小时,多则几百小时,有些料液经过长时间的静置后容易产生分层现象,需要通过人工定时摇晃补料瓶的方式保持料液的均匀。摇晃过程中,补料瓶难以静止在称重装置上,容易对称重过程造成影响。
技术实现要素:
4.为了在不移动补料瓶的情况下保持料液的均匀,本发明提供一种称重装置及方法。
5.本发明为解决背景技术中提出的技术问题,采用的技术方案如下:一种称重装置,包括底座、秤盘以及支撑装置,所述底座上设有第一称重传感器;所述第一称重传感器上部设有支撑装置;
6.所述支撑装置上设有秤盘;所述秤盘下方设有磁力搅拌系统;所述磁力搅拌系统与秤盘之间设有物理空间,不物理接触。
7.本发明的磁力搅拌系统可以设置在支撑装置上。
8.进一步,所述磁力搅拌系统通过支架设置于秤盘下方;所述支架包括上部安装条、下部安装条、以及竖直连接杆;所述上部安装条、下部安装条通过竖直连接杆连接;所述磁力搅拌系统与上部安装条连接;所述下部安装条与底座连接;所述磁力搅拌系统包括电机、以及设置在电机转动轴上的磁钢;所述电机设置于上部安装条的下部;所述磁钢设置于上部安装条的上部;所述电机转动轴穿设于上部安装条。
9.进一步,所述支架与底座分离式设置或所述支架与底座连接成一个整体。
10.进一步,所述第一称重传感器包括传感器本体以及垫块;所述垫块设置于底座上;所述传感器本体的一端设置于垫块上,另一端腾空;所述支撑装置设置于传感器本体上。
11.进一步,本发明设置有第二称重传感器,用于对磁力搅拌系统进行称重,以测得磁力搅拌系统受到转子a的拉力的大小。
12.进一步,第二称重传感器设置在底座与支架之间,或设置在磁力搅拌系统与支架之间,或支架的上部安装条、下部安装条、以及竖直连接杆的任一位置。
13.进一步,还包括数据采集系统,数据采集系统分别信号连接与第一称重传感器、以及第二称重传感器。
14.进一步,所述第一称重传感器与底座之间设置防震装置。
15.本发明的第二个目的是提供一种称重方法,采用上述装置,具体如下:
16.第一称重传感器实际测得的重量为补料瓶的重量加上吸引力所产生的重量;
17.第二称重传感器测得的拉力大小与吸引力的大小相同,方向相反,计算最终称重测量结果时;
18.将第一称重传感器的测量值与第二称重传感器的测量值相减,就可以得到补料瓶的准确重量。
19.有益效果:
20.1、本发明称重装置,能够在不移动补料瓶的情况下,对补料瓶中的料液进行搅拌,因此,能够在保证料液均匀的情况下,提高称重的准确性,并且,省去了人工定时摇晃补料瓶的动作,提高了补料的自动化程度。第一称重传感器对补料瓶进行称重的同时,磁力搅拌系统通过磁力驱动补料瓶中的转子,对补料瓶中的料液进行搅拌,防止料液出现分层现象。
21.2、由于磁力搅拌系统启动时,会产生震动。如果磁力搅拌系统直接设置在秤盘下方的话,磁力搅拌系统的震动会传导至第一称重传感器上,从而降低称重的稳定性。将磁力搅拌系统设置于支架上后,磁力搅拌系统与秤盘可以相互分离,互不接触。这样,即使磁力搅拌系统工作时产生较大的震动,也不会对称重的稳定性造成影响。
22.3、由于第一称重传感器与底座之间设置防震装置(如橡皮垫片),减小了磁力搅拌系统的震动对第一称重传感器的影响,因此,通过支架将称重装置形成整体后,对补料瓶的称重的稳定性影响较小。
附图说明
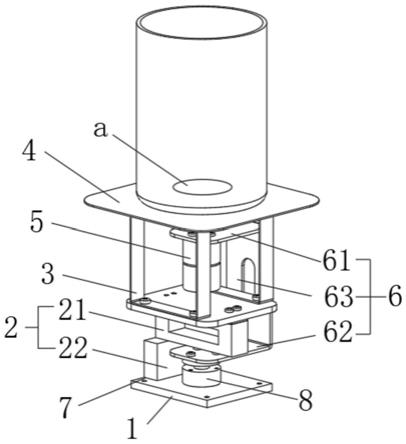
23.图1是本发明的称重装置的示意图;
24.图2是本发明的称重装置的正视图。
具体实施方式
25.以下结合附图和具体实施例对本发明作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
26.如图1、2所示,本发明一种称重装置,包括底座1、秤盘4以及支撑装置3,所述底座1上设有第一称重传感器2;所述第一称重传感器上部设有支撑装置3;所述支撑装置3上设有秤盘4;所述秤盘4下方设有磁力搅拌系统5;所述磁力搅拌系统5与秤盘4之间不接触。本发明的磁力搅拌系统5可以设置在支撑装置3上。
27.第一称重传感器2对补料瓶进行称重的同时,磁力搅拌系统5通过磁力驱动补料瓶中的转子a,对补料瓶中的料液进行搅拌,防止料液出现分层现象。所述第一称重传感器2包括传感器本体21以及垫块22;所述垫块22设置于底座1上;所述传感器本体21的一端设置于垫块22上;所述支撑装置3设置于传感器本体21上;传感器本体21另一端腾空,当有重量变化时,传感器本体21腾空的一端会轻微的弯曲,产生形变,从而对补料瓶进行称重。所述磁力搅拌系统5通过支架6设置于秤盘4下方。所述支架6包括上部安装条61、下部安装条62、以及竖直连接杆63;所述上部安装条61、下部安装条62通过竖直连接杆63连接;所述磁力搅拌系统5与上部安装条61连接;所述下部安装条62与底座1连接。
28.所述支架6与第一称重传感器2设置在底座1的不同位置。
29.为了获得较高的称重稳定性,可以将支架6与底座1分离式设置。但是,分离式的设置方式也会影响到设备使用的便利性。因此,可以将支架6与底座1连接,形成整体。
30.所述第一称重传感器2与底座1之间设置防震装置7。所述磁力搅拌系统5包括电机51、以及设置在电机51转动轴上的磁钢52;所述电机51设置于上部安装条61的下部;所述磁钢52设置于上部安装条61的上部;所述电机51转动轴穿设于上部安装条61。
31.具体的,电机51的转动轴带动磁钢52转动,设置于补料瓶中的转子a受磁钢52的磁力作用,随磁钢52转动,对补料瓶中的料液进行搅拌。
32.本发明还设置第二称重传感器8,对磁力搅拌系统5进行称重,以测得磁力搅拌系统5受到转子a的拉力的大小。在称重过程中,转子a会受到磁力搅拌系统5的吸引力。因此,第一称重传感器2实际测得的重量为补料瓶的重量加上吸引力所产生的重量。并且由于转子a在称重过程中是不停的旋转的,且转速也可能根据需要随时改变,因此,转子a的受力也较为复杂,对称重结果的准确性以及稳定性都会产生影响。特别是在补料精度要求较高的情况下,转子a受到磁力搅拌系统5的吸引力对称重结果是一个较大的干扰源。
33.为了消除上述干扰源,就需要测量转子a受到磁力搅拌系统5的吸引力。由于力的作用是相互的,因此,可以通过测量磁力搅拌系统5受到转子a的拉力的大小,得到转子a受到磁力搅拌系统5的吸引力的大小。如图2为了测量磁力搅拌系统5受到转子a的拉力,可以在支架6上设置第二称重传感器8。第二称重传感器8可以设置在底座1与支架6之间,也可以设置在磁力搅拌系统5与支架6之间,还可以设置于支架6的任意位置。第二称重传感器8测得的拉力大小与吸引力的大小相同,方向相反。计算最终称重测量结果时,只需要将第一称重传感器2的测量值与第二称重传感器8的测量值相减,就可以得到补料瓶的准确重量。另外,由于第一称重传感器2、以及第二称重传感器8均为实时测量,因此,也可以消除转子a的转动对称重的干扰。
34.此外,本发明还包括数据采集系统,所述第一称重传感器2、以及第二称重传感器8分别与数据采集系统信号连接。所述第一称重传感器2型号采用梅特勒mt1022,第二称重传感器8型号采用欧路达at8107。
35.数据采集系统采集到第一称重传感器2、以及第二称重传感器8的测量信号后,将两者相减,最终得到称重结果。
36.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1