一种输电线路隐患净空距离无人机航测方法及系统与流程
1.本发明属于无人机航测的技术领域,尤其涉及输电线路隐患净空距离无人机航测方法及系统。
背景技术:
2.随着电网规模的不断扩大,传统地面观测方式存在测量过程繁琐、仪器沉重不便于携带、受环境影响严重、需要人力翻山越岭观测效率低等问题,难以应对日益扩大的电网规模。无人机具有良好的观测视野、操控灵活高效、节省人力的特点,能够有效的解决传统地面观测方法观测效率低的问题。近年来rtk(real-time kinematic,实时动态载波相位差分技术)技术在无人机领域应用的不断成熟实现了厘米级的定位精度,为无人机航测技术在电网运维工作中的应用奠定了基础。
3.现有点云等无人机航测技术通过不同位置多角度发出并接收扫描激光雷达信号,建立三维模型还原扫描范围内物体轮廓,在三维模型内测量所需数据,该方案三维模型构建成本高极大地提高了运维成本。
技术实现要素:
4.鉴于此,本发明提出一种输电线路隐患净空距离航测分析系统,从输电专业自身需求出发,根据净空距离自身空间结构特点,制定测量分析方案应用于无人机飞控平台上,具有测量成本低,灵活性高,测量准确的优势,更好的应用于输电线路测量工作中。
5.为解决上述问题,本发明提供一种输电线路隐患净空距离无人机航测方法,包括:
6.应用无人机进行采点根据采集数据计算测量值,首先启动无人机测量隐患所在档导线弧垂,然后测量隐患相对导线的净空距离,并计算隐患处于该档导线的相对位置,综合测量环境因素、线路参数以及测量数值分析极端环境下隐患净空距离,最终根据输电线路运行规程判定是否满足运行条件。
7.所述的应用无人机进行采点根据采集数据计算测量值包括:利用无人机自身定位功能,定位无人机云台空间位置信息数据,包括,纬度la、经度lo、海拔高度al、观测角度按照测量方案采集数据计算测量值。
8.所述的首先启动无人机测量隐患所在档导线弧垂包括:首先无人机飞至线路侧方对导线两端线夹进行采点,云台方向垂直导线所在平面保持观测角度为零度,镜头中心对准导线线夹,记录前端线夹位置信息为纬度la1、经度lo1、海拔高度al1、观测角度0,后端线夹位置信息为,纬度la2、经度lo2、海拔高度al2、观测角度0;按照相同方法飞至弧垂点保持相对导线距离不变进行采点,记录弧垂点位置信息为纬度la3、经度lo3、海拔高度al3、观测角度0,根据采点数据计算导线弧垂值。
9.所述的根据采点数据计算导线弧垂值包括:首先判定al1、al2大小,将大者定义为高点,将纬度、经度、海拔高度赋值给高点纬度lag、高点经度log、高点绝对海拔alg;小者定义为低点,将纬度、经度、海拔高度赋值给低点纬度lad、低点经度lod、低点绝对海拔高度
ald;
10.计算低点、弧垂点水平距离l1为:
11.l1=6371004
×
ar cos[cos lad×
cos la3×
cos(lo
d-lo3)+sin lad×
sin la3]
[0012]
计算低点、高点水平距离l为:
[0013]
l=6371004
×
ar cos[cos lad×
cos lag×
cos(lo
d-log)+sin lad×
sin lag]
[0014]
计算低点、弧垂点垂直距离a为:
[0015]
a=al
d-al2[0016]
计算弧垂点、高点垂直距离b为:
[0017]
b=al
g-al2[0018]
计算弧垂f为:
[0019]
f=a+(b-a)l1/l。
[0020]
所述的然后测量隐患相对导线的净空距离包括:无人机先后飞至下方平视点、下方俯视点、上方平视点、上方俯视点四点,飞至下方平视点,采集该点纬度laa、纬度loa海拔高度ala;飞至下方俯视点,采集该点海拔高度alb、俯视角度α;飞至上方平视点,采集该点海拔高度alc;飞至上方俯视点,采集该点海拔高度ald,俯视角度β;
[0021]
计算下方平视点距隐患顶点距离la为:
[0022][0023]
计算计算下方平视点与上方平视点高差h为:
[0024]
h=al
c-ala[0025]
计算上方平视点距导线距离lc为:
[0026][0027]
上下目标点净空距离s为:
[0028][0029]
水平距离ls为ls=l
c-la,垂直距离h为h=al
c-ala。
[0030]
所述的并计算隐患处于该档导线的相对位置包括:根据两端线夹与下方平视点纬度、经度数据,分别计算下方平视点距两端线夹距离l4与l5为:
[0031]
l4=6371004
×
ar cos[cos la1×
cos laa×
cos(lo
1-loa)+sin la1×
sin laa]
[0032]
l5=6371004
×
ar cos[cos la2×
cos laa×
cos(lo
2-loa)+sin la2×
sin laa]
[0033]
判定l4与l5数值大小,小者定义为近端线夹,并将数值赋值给近段距离lj;大者定义为远端线夹,并将数值赋值给近段距离ly。根据两端线夹与下方平视点在地面投影的三角形几何关系,计算隐患处于该档导线的相对位置,即为隐患点距近端线夹的水平距离x为
[0034][0035]
所述的综合测量环境因素、线路参数以及测量数值分析极端环境下隐患净空距离包括:首先根据温度为t℃时观测弧垂f,结合档距l、代表档距l0、导线膨胀系数α,计算极端条件下,导线温度t
max
为40℃时的弧垂f
40℃
为
[0036][0037]
该点处的弧垂f
x
为
[0038][0039]
然后结合弧垂分析结果极端条件导线弧垂f
40℃
计算隐患点处弧垂增量
△f[0040][0041]
最终得出导线温度40℃极端风偏条件下,隐患净空距离sj为
[0042][0043]
基于上述方法的输电线路净空距离无人机航测系统,包括:数据采集模块、数据运算模块、人机交互操控界面;
[0044]
所述数据采集模块,用于采集无人机自身定位系统所定位得出的经度、纬度、绝对海拔高度、云台角度;
[0045]
所述数据运算模块,用于执行上述计算分析方法;
[0046]
所述人机交互操控界面,用于航测系统接收操作人员采集数据、运算等指令,显示采集与运算结果。
[0047]
所述人机交互操控界面,用于航测系统接收操作人员采集数据、运算等指令,显示采集与运算结果包括:
[0048]
在人机交互界面设置虚拟按键,用于向无人机云台发送采集位置信息指令,完成各特定位置信息的记录与存储操作,以及发送运算指令根据采集数据分析最终结果。
[0049]
本发明的优点效果如下:
[0050]
本发明专利提供一种输电线路净空距离无人机航测分析方法及系统。从输电线路运维本职工作出发,以无人机rtk技术为基础,根据净空距离空间几何结构特点制定航测方案,然后结合测量环境、线路状态分析极端条件下净空距离,最重根据输电线路运行规程判定是否满足运行要求。该方案一方面避免了传统经纬仪地面观测方式低效的问题,另一方面解决了现有点云航测方式成本高的问题,具有操作方便灵活等优势,在输电线路运维工作中具有良好的应用前景。
附图说明
[0051]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0052]
图1为本发明公开输电线路净空距离无人机航测分析系统组成模块图;
[0053]
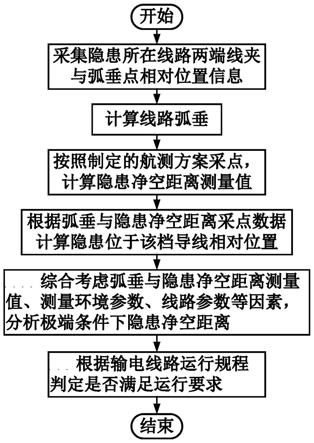
图2为本发明公开输电线路净空距离无人机航测分析系统分析流程图;
[0054]
图3为本发明公开输电线路净空距离无人机航测分析系统弧垂测量示意图;
[0055]
图4为本发明公开输电线路净空距离无人机航测分析系统净空距离测量图:
[0056]
图5为本发明公开输电线路净空距离无人机航测分析系统隐患相对位置计算示意图组。
[0057]
图6为本发明公开输电线路净空距离无人机航测分析系统极端条件下净空距离分析示意图
具体实施方式
[0058]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置的例子。
[0059]
参见图1为一种输电线路净空距离无人机航测系统组成结构图,该航测系统主要由数据采集模块1、数据传输模块2、数据运算模块3、人机交互界面4组成。其中,数据采集模块1用于操作人员按照本专利提出方法采集无人机云台的位置信息,包括纬度、经度、绝对海拔高度、云台pitch轴角度;数据传输模块2负责将采集到的云台位置信息以及镜头拍摄拍摄图像实时传输回无人机飞控上进行记录;数据分析模块3负责将传输到飞控上的数据按照本专利提出净空距离分析方法进行分析;人机交互界面4用于操控人员向系统发送采集位置信息与运算指令、实时显示采集数据与镜头拍摄画面等功能。
[0060]
上述输电线路净空距离无人机航测系统的总体测量过程参见图2:
[0061]
首先采集从隐患所在线路侧方采点获取两端线夹与弧垂点相对位置关系,并计算测量弧垂,然后垂直于线路方向制定的航测方案采点计算隐患净空距离测量值,根据弧垂与隐患净空距离采点数据计算隐患位于该档导线中的相对位置,结合测量环境与线路参数分析极端条件下隐患净空距离数值,最终根据输电线路运行规程判定是否满足运行要求。
[0062]
上述输电线路净空距离无人机航测系统弧垂数据采集具体工作过程参见图3:
[0063]
步骤s310;启动无人机进入航测分析系统,将无人机飞至线路侧方云台方向垂直于线路所在平面,先后将镜头中心对准两端线夹,记录此时云台信息分别为纬度la1,经度lo1,海拔高度al1,pitch轴观测角度0与纬度la2,经度lo2,海拔高度al2,pitch轴观测角度0;
[0064]
步骤s320:无人机飞至弧垂点侧方,将镜头中心对准弧垂点,记录此时云台纬度la3,经度lo3,海拔高度al3,pitch轴观测角度0,弧垂数据采集阶段完成。
[0065]
步骤s330:判定两端线夹采集海拔高度大小,将数值大者定义为高点,云台信息为(lag,log,alg,0),小者定义为低点,云台信息为(lad,lod,ald,0);
[0066]
基于上述过程所获取数据,输电线路净空距离无人机航测系统弧垂计算具体工作过程包括:
[0067]
步骤s410:首先判定al1、al2大小,将大者定义为高点,将纬度、经度、海拔高度赋值给高点纬度lag、高点经度log、高点绝对海拔alg;小者定义为低点,将纬度、经度、海拔高度赋值给低点纬度lad、低点经度lod、低点绝对海拔高度ald。
[0068]
步骤s420:计算低点、弧垂点水平距离l1为
[0069]
l1=6371004
×
ar cos[cos lad×
cos la3×
cos(lo
d-lo3)+sin lad×
sin la3]
[0070]
步骤s430:计算低点、高点水平距离l为
[0071]
l=6371004
×
ar cos[cos lad×
cos lag×
cos(lo
d-log)+sin lad×
sin lag]
[0072]
步骤s440:计算低点、弧垂点垂直距离a为
[0073]
a=al
d-al2[0074]
步骤s450:计算弧垂点、高点垂直距离b为
[0075]
b=al
g-al2[0076]
步骤s460:计算弧垂f为
[0077]
f=a+(b-a)l1/l
[0078]
上述输电线路净空距离无人机航测系统净空距离数据采集具体工作过程参见图4:
[0079]
步骤s510;启动无人机进入航测分析系统,将无人机飞至线路与隐患外侧云台方向垂直于线路所在平面,首先飞至下方平视点,此时云台角度调为零度镜头中心对准下方目标,记录此时云台信息(laa,loa,ala,0);
[0080]
步骤s520:然后飞至下方俯视点,此时保持云台方向不变,垂直提升无人机一定高度,调整云台pitch轴角度使镜头中心再次对准下方目标,角度为α,记录此时云台信息为(lab,lob,alb,α);
[0081]
步骤s530:飞至上方平视点,保持云台方向不变继续垂直提升无人机,调整云台pitch轴角度为零镜头中心对准上方目标,记录此时云台信息为(lac,loc,alc,0);
[0082]
步骤s540:最后飞至上方俯视点,此时保持云台方向不变,垂直提升无人机一定高度,调整云台pitch轴角度使镜头中心再次对准上方目标,角度为β,记录此时云台信息为(lad,lod,ald,β)。
[0083]
基于上述过程所获取数据,输电线路净空距离无人机航测系统净空距离计算具体工作过程包括:
[0084]
步骤s610:计算下方平视点距隐患顶点距离la为
[0085][0086]
步骤s620:计算计算下方平视点与上方平视点高差h为
[0087]
h=al
c-ala[0088]
步骤s630:计算上方平视点距导线距离lc为
[0089][0090]
步骤s640:上下目标点净空距离s为
[0091][0092]
步骤s650:水平距离ls为ls=l
c-la,垂直距离h为h=al
c-ala。
[0093]
基于上述过程所获取数据,输电线路净空距离无人机航测系统隐患相对导线位置计算具体工作过程参见图5:
[0094]
步骤s710:根据两端线夹与下方平视点纬度、经度数据,分别计算下方平视点距两端线夹距离l4与l5为:
[0095]
l4=6371004
×
ar cos[cos la1×
cos laa×
cos(lo
1-loa)+sin la1×
sin laa]
[0096]
l5=6371004
×
ar cos[cos la2×
cos laa×
cos(lo
2-loa)+sin la2×
sin laa]
[0097]
步骤s720:判定l4与l5数值大小,小者定义为近端线夹,并将数值赋值给近段距离lj;大者定义为远端线夹,并将数值赋值给近段距离ly。根据两端线夹与下方平视点在地面投影的三角形几何关系,计算隐患处于该档导线的相对位置,即为隐患点距近端线夹的水平距离x为:
[0098][0099]
基于上述过程所获取数据,输电线路净空距离无人机航测系统极端条件净空距离分析具体工作过程参见图6:
[0100]
步骤s810:根据温度为t℃时观测弧垂f,结合档距l、代表档距l0、导线膨胀系数α,计算极端条件下,导线温度t
max
为40℃时的弧垂f
40℃
为
[0101][0102]
步骤s820:计算该隐患点处的弧垂f
x
为
[0103][0104]
步骤s830:然后结合弧垂分析结果极端条件导线弧垂f
40℃
计算隐患点处弧垂增量
△f[0105][0106]
步骤s840:得出导线温度40℃极端风偏条件下,隐患净空距离sj为
[0107][0108]
最后,根据gb50233-2014《110kv-750kv架空输电线路施工及验收规范》表a.0.3-2导线与树木之间的最小净空距离(m)判定是否满足线路运行要求。
[0109]
表a.0.3-2导线与树木之间的最小净空距离(m)
[0110]
标称电压(kv)110220330500750净空距离3.54.05.07.08.5
[0111]
此外,本发明根据所提算法制作能够应用于无人机唯恐平台上的航测app,建立输电线路净空距离无人机航测系统,实现航测数据的实时采集实时测量。该系统操作灵活,测量效率高、测量成本低,有效地解决了现有输电线路测量方法所面临的问题。
[0112]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由权利要求指出。
[0113]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1