基于高密度微结构阵列电极的力敏传感器的制备方法
1.本发明属于微纳加工及触觉传感技术领域,具体涉及一种基于高密度微结构阵列电极的力敏传感器的制备方法。
背景技术:
2.人工智能、物联网、生命健康等领域是当今世界争夺的经济科技制高点,以信息材料/器件为核心的传感器及智能微系统的创新与自主研发是关键。传感器是所有智能化的起步入口、数据的来源,所有新的智能化应用都和传感器有密切关系。其中,触觉传感器可进行包括力、热在内的多信息感知,是制约我国的35项“卡脖子”技术之一。因此,发展触觉传感器与智能感知微系统集成技术,无论对于加强国防建设,还是占领人工智能技术高地,实现科技引领经济发展,都是刻不容缓的。而我国在触觉传感器方面的研发起步较晚,特别是高性能传感材料与高灵敏触觉传感器的集成制备更是关键瓶颈。
3.灵敏度是衡量力敏传感器的重要参数之一,用于描述传感器受到单位强度的压力时输出信号的强度(例如电阻、电流、电压或电容的变化幅度),用输出信号强度的变化值除以初始输出信号强度再除以压力变化值来表示。力敏传感器的灵敏度越高,意味着在外界刺激下的信噪比就越高,可以检测到细微的变化。电阻式力敏传感器是通过检测两极板间电阻随压力的变化情况来测量压力大小。当压力增大时,电流流动的截面积增大,流动距离缩短,电阻下降。然而一般的压力传感器都具有薄厚度、大面积的特性,因而电阻式传感器的灵敏度都很低,并且其响应速度和感应下限都受限于传统活性层较高的压缩模量和较慢的回复速度而得不到提升。电容式力敏传感器可通过改变正对面积和平行板间距来探测不同的力。电容式传感器的主要优势在于其对力的敏感性强,可以实现通过低能耗检测微小的静态力。
4.响应时间是力敏传感器在施加触觉刺激时达到90%平衡点所用的时间。与滞后现象类似,响应时间的测试没有标准的方法。响应时间与弹性体的粘弹性有关,当弹性体的弹性增强时,粘弹性会减小。各种微结构(如周期金字塔、穹顶状和半球状微结构)被用来将响应时间缩短到几十毫秒。
5.提高电阻/电容式力敏传感器灵敏度和响应时间的方法主要包括:(1)建立多孔结构和(2)建立周期性微结构阵列。此外,科学家还开发出了多层堆叠微结构的方式进一步提高其性能。不过与电容式传感器的微加工法有所区别的是,电阻式压力传感器的性能提升要点在于提高电流流动截面积随压力变化而变化的量,单纯降低压缩模量所能提升的性能有限。相比于金字塔等结构,圆顶式结构以及多尺度圆顶结构对提升电阻式传感器的灵敏度和感应范围更为有效。同样地,光刻/软光刻、生物模版法以及传统弹性多孔材料的制备方法也都适用于加工电阻式传感器的微结构。
6.常规的提高力敏传感器灵敏度和响应时间的方法都侧重于构建力敏材料的周期性微结构阵列。例如,中国专利cn202110545181.6公开了一种mxene的高灵敏度压阻传感器及制备方法,所述压阻传感器的高灵敏度是通过构建微结构mxene@pu敏感材料来实现的,
包括导电材料、柔性叉指电极和柔性敏感层,所述柔性叉指电极是利用叉指电极掩模版放置在任一柔性材料上并通过喷涂工艺制备了mxene的柔性叉指电极,所述柔性敏感层是利用砂纸为模版得到具有表面微结构的柔性敏感层,并在所述柔性敏感层的微结构表面通过喷涂工艺制备出mxene@pu敏感层;将上述部分组装在一起后,得到一种mxene的高灵敏度压阻传感器。这种通过构建力敏材料的周期性微结构阵列来提高力敏传感器灵敏度和响应时间的方法,不具有普适性和通用性,而且力学传感器的灵敏度及响应时间受限于周期性微结构阵列,性能提升有限。
技术实现要素:
7.本发明目的是提供一种基于高密度微结构阵列电极的力敏传感器的制备方法,通过构建高密度微结构阵列电极,从电极的角度出发构建力敏材料,具有普适性和通用性,极大地提高了力敏传感器的灵敏度及响应时间。
8.具体地说,本发明提供了一种基于高密度微结构阵列电极的力敏传感器的制备方法,包括:
9.在基板上采用微加工方法制备高密度微结构阵列模版;
10.对所述高密度微结构阵列模版进行等离子处理,在所述高密度微结构阵列模版上旋涂预聚液后将其固化形成高密度微结构阵列基底,将所述高密度微结构阵列基底从高密度微结构阵列模版剥离;
11.在所述高密度微结构阵列基底上覆盖电极掩模版,在其表面进行导电层沉积,得到高密度微结构阵列电极;
12.将所述高密度微结构阵列电极与所需的力敏材料和封装材料进行封装和集成,得到基于高密度微结构阵列电极的力敏传感器。
13.进一步的,所述基板是柔性高分子、陶瓷、不锈钢、硅片、石英或玻璃中的任意一种。
14.进一步的,所述微加工方法是激光加工或光刻中的任意一种。
15.进一步的,所述高密度微结构阵列是微圆锥阵列、微棱锥阵列或微棱柱阵列中的任意一种,阵列密度是1000mm-2
~250000mm-2
。
16.进一步的,所述预聚液是柔性高分子预聚液pi、pdms或ecoflex。
17.进一步的,所述高密度微结构阵列电极厚度≤1μm。
18.进一步的,在所述对所述高密度微结构阵列模版进行等离子处理之前,还包括对所述高密度微结构阵列模版进行清洗。
19.进一步的,所述等离子处理采用的气体是ar/o2混合气体,等离子体功率是50w~300w。
20.进一步的,所述导电层沉积的方法是蒸镀、电镀或磁控溅射方法中的一种,所述导电层的电极材料包括金、银、铜、铂导电率高的金属材料中的一种。
21.进一步的,所述力敏材料是压阻或电容敏感材料中的一种,所述封装材料是pi、有机硅胶或有机树脂中的一种。
22.本发明的基于高密度微结构阵列电极的力敏传感器的制备方法的有益效果如下:
23.本发明提供的基于高密度微结构阵列电极的力敏传感器的制备方法,通过构建高
密度微结构阵列电极,从电极的角度出发,可用于构建具有各种周期性微结构阵列的力敏材料,具有普适性和通用性,制备成力敏传感器后,能够极大地提高了力学传感器的灵敏度、减少了传感器的响应时间,且具有良好的力学时间稳定性。本发明提供的基于高密度微结构阵列电极的力敏传感器的制备方法和使用该方法制备出的力敏传感器,将在微纳加工、柔性电子和触觉传感等领域有着重要应用。
附图说明
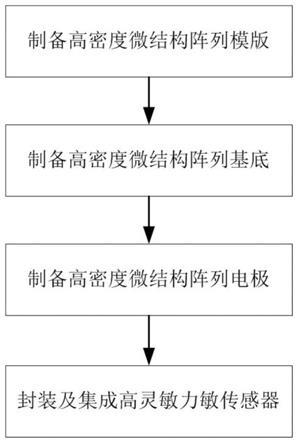
24.图1是本发明实施例的制备方法流程示意图。
25.图2是本发明实施例所制备的基于高密度微结构阵列电极的力敏传感器(未封装)示意图。
26.图3是本发明实施例2所制备的高密度微结构阵列电极的sem图。
27.图4是本发明实施例3所制备的基于高密度微结构阵列电极的力敏传感器的力学灵敏度响应图。
28.图5是本发明实施例4所制备的基于高密度微结构阵列电极的力敏传感器的力学响应响应时间图。
29.图6是本发明实施例5所制备的基于高密度微结构阵列电极的力敏传感器的力学时间稳定性图。
30.图7是本发明实施例6所制备的高密度微结构阵列电极的sem图。
31.图8是本发明实施例7所制备的基于高密度微结构阵列电极的力敏传感器的力学灵敏度响应图。
32.附图中标识:1-力敏材料,2-高密度微结构阵列电极,3-高密度微结构阵列基底。
具体实施方式
33.下面结合实施例并参照附图对本发明作进一步详细描述。下述实施例中所使用的实验方法如无特殊说明,均为常规方法。下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。例如,本发明实施例中使用的pdms购自道康宁184a。
34.实施例1:
35.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,如图1所示。包括如下步骤:
36.(1)制备高密度微结构阵列模版。在洁净的基板上采用微加工技术制备高密度微结构阵列模版。
37.(2)制备高密度微结构阵列基底。对所制备的高密度微结构阵列模版进行等离子处理,在高密度微结构阵列模版上旋涂预聚液后将其固化形成高密度微结构阵列基底,将固化后的高密度微结构阵列基底从高密度微结构阵列模版剥离。优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。
38.(3)制备高密度微结构阵列电极。将所制备的高密度微结构阵列基底覆盖上电极掩模版,在其表面进行导电层沉积,得到高密度微结构阵列电极。
39.(4)封装及集成高灵敏力敏传感器。将所制备的高密度微结构阵列电极、所需的力
敏材料进行封装和集成,制备成基于高密度微结构阵列电极的力敏传感器。未封装的基于高密度微结构阵列电极的力敏传感器的结构如图2所示。该力敏传感器具有普适性和通用性,极大地提高了力学传感器的灵敏度、减少了传感器的响应时间。
40.本实施例中,制备高密度微结构阵列模版的基板是柔性高分子(pet、pi或pen等)、陶瓷(al2o3、aln等)、不锈钢、硅片、石英或玻璃等材料中的任意一种。微加工方法可以是激光加工或光刻等中的任意一种。高密度微结构阵列可以是微圆锥阵列、微棱锥阵列或微棱柱阵列等中的任意一种。高密度微结构阵列的阵列密度是1000mm-2
~250000mm-2
。
41.本实施例中,采用的预聚液是pi、pdms或ecoflex等柔性高分子预聚液。等离子体预处理工艺中的气体是ar/o2混合气体,等离子体功率是50w~300w。
42.本实施例中,导电层的沉积方法可以是蒸镀、电镀或磁控溅射等方法中的一种。导电层的电极材料包括金、银、铜、铂等导电率高的金属材料中的一种。导电层的高密度微结构阵列电极厚度≤1μm。
43.本实施例中,力敏材料可以是压阻或电容敏感材料中的一种。封装材料可以是pi、有机硅胶或有机树脂等中的一种。
44.实施例2:
45.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,其中高密度微结构阵列为高密度微圆锥阵列,包括如下步骤:
46.(1)采用飞秒激光加工高密度微圆锥阵列铜模版(阵列密度1000mm-2
),具体飞秒激光的加工参数为:激光功率3.25w,加工速度400mm/s,加工次数为10次。
47.优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。例如,将所制备的微圆锥阵列铜模版先后分别用洗涤剂、去离子水和乙醇进行超声清洗30min。
48.(2)将洁净的微圆锥阵列铜模版用ar/o2等离子体处理,具体参数为:功率150w,ar流量100sccm,o2流量100sccm,等离子清洗时间3min。将所需的pi((polyimide,聚酰亚胺))预聚液在真空条件下除泡至少30min。在所制备的微圆锥阵列铜模版上旋涂pi预聚液,旋涂参数为1000r/s,旋涂时间为60s。将旋涂后的pi预聚液分段固化,具体参数为:90℃保温1h,120℃保温1h。将固化的微圆锥阵列pi基底常温下超声30min,使其从微圆锥阵列铜模版上剥离。
49.(3)通过电镀的方法用微圆锥阵列pi基底制备高密度微圆锥阵列cu电极,cu电极的厚度为1μm。所制备的高密度微圆锥阵列电极sem图如图3所示。
50.(4)将所制备的高密度微圆锥阵列铜电极与介电弹性体pdms通过有机环氧树脂封装成电容式力敏传感器,得到基于高密度微结构阵列电极的力敏传感器。
51.实施例3:
52.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,其中高密度微结构阵列为高密度微棱锥阵列,包括如下步骤:
53.(1)采用飞秒激光加工高密度微棱锥阵列玻璃模版(阵列密度16000mm-2
),具体飞秒激光的加工参数为:激光功率3w,加工速度400mm/s,加工次数为10次。
54.优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。例如,将所制备的微棱锥阵列玻璃模版先后
分别用洗涤剂、去离子水和乙醇进行超声清洗30min。
55.(2)将洁净的微棱锥阵列玻璃模版用ar/o2等离子体处理,具体参数为:功率300w,ar流量100sccm,o2流量100sccm,等离子清洗时间3min。将所需的pdms预聚液在真空条件下除泡至少30min。将pdms预聚液和固化剂10:1混合,在所制备的微棱锥阵列玻璃阵列模版上旋涂pdms混合液,旋涂参数为1000r/s,旋涂时间为60s。将旋涂后的pdms混合液固化,具体固化参数为90℃下保温2h。将固化的微棱锥阵列pdms基底在常温下超声30min,使其从微棱锥阵列玻璃模版上剥离。
56.(3)在所制备的微棱锥阵列pdms基底上盖上叉指电极金属掩模版,通过磁控溅射的方法制备微棱锥阵列ag电极,ag电极的厚度为0.2μm。
57.(4)将所制备的高密度微棱锥阵列ag电极与压阻式力敏材料velostat通过pi封装成压阻式力敏传感器,得到基于高密度微结构阵列电极的力敏传感器。
58.测量本实施例制备的基于高密度微结构阵列电极的力敏传感器在不同压力下的电流变化率,测试结果如图4所示,其中横坐标代表对力敏传感器施加的压力,纵坐标代表力敏传感器的输出电流变化率。可以看出,该力敏传感器在不同压力下的电流变化率与所受压力成线性关系,具有较高的力学灵敏度。
59.实施例4:
60.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,其中高密度微结构阵列为高密度微圆锥阵列,包括如下步骤:
61.(1)采用飞秒激光加工高密度微圆锥阵列al2o3模版(阵列密度16000mm-2
),具体飞秒激光的加工参数为:激光功率3.5w,加工速度400mm/s,加工次数为10次。
62.优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。例如,将所制备的微圆锥阵列al2o3模版先后分别用洗涤剂、去离子水和乙醇进行超声清洗30min。
63.(2)将洁净的微圆锥阵列al2o3模版用ar/o2等离子体处理,具体参数为:功率300w,ar流量100sccm,o2流量100sccm,等离子清洗时间3min。将所需的pdms预聚液在真空条件下除泡至少30min。将pdms预聚液和固化剂10:1混合,在所制备的微圆锥阵列al2o3模版上旋涂pdms混合液,旋涂参数为1000r/s,旋涂时间为60s。将旋涂后的pdms混合液固化,具体参数为90℃下保温2h。将固化的微圆锥阵列pdms基底在常温下超声30min,使其从微圆锥阵列al2o3模版上剥离。
64.(3)在所制备的微圆锥阵列pdms基底上盖上叉指电极金属掩模版,通过热蒸镀的方法制备微圆锥阵列au电极,au电极的厚度为0.1μm。
65.(4)将所制备的高密度微圆锥阵列au上下电极与压阻式力敏材料velostat通过有机硅胶pdms封装成压阻式力敏传感器,得到基于高密度微结构阵列电极的力敏传感器。
66.本实施例制备的基于高密度微结构阵列电极的力敏传感器力学响应时间如图5所示,其中横坐标代表力敏传感器受力后的时间,纵坐标代表力敏传感器的电流变化率。可以看出,该力敏传感器具有较短的响应时间。
67.实施例5:
68.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,其中高密度微结构阵列为高密度微棱柱阵列,包括如下步骤
69.(1)采用飞秒激光加工高密度微棱柱阵列pet模版(阵列密度1000mm-2
),具体飞秒激光的加工参数为:激光功率0.5w,加工速度400mm/s,加工次数为10次。
70.优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。例如,将所制备的微棱柱阵列pet模版微结构模版先后分别用洗涤剂、去离子水和乙醇进行超声清洗30min。
71.(2)将洁净的微棱柱阵列pet模版用ar/o2等离子体处理,具体参数为:功率50w,ar流量100sccm,o2流量100sccm,等离子清洗时间3min。将所需的pi预聚液在真空条件下除泡至少30min。在所制备的微棱柱阵列pet微结构阵列模版上旋涂pi预聚液,旋涂参数为1000r/s,旋涂时间为60s。将旋涂后的pi预聚液分段固化,具体参数为90℃保温1h,120℃保温1h。将固化的微棱柱阵列pi基底在常温下超声30min,使其从微棱柱阵列pet模版上剥离。
72.(3)在所制备的微圆锥阵列pi基底上盖上叉指电极金属掩模版,后通过磁控溅射的方法制备微棱柱阵列pt电极,pt电极的厚度为0.1μm。
73.(4)将所制备的高密度微棱柱阵列pt上下电极与压阻式力敏材料velostat通过有机环氧树脂封装成压阻式力敏传感器,得到基于高密度微结构阵列电极的力敏传感器。
74.图6为本实施例所制备的基于高密度微结构阵列电极的力敏传感器力学时间稳定性图,用于反映基于高密度微结构阵列电极的力敏传感器在2kpa压强下被反复撞击后,力敏传感器输出电流随时间变化情况,可以看出该力敏传感器具有良好的力学时间稳定性。
75.实施例6:
76.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,其中高密度微结构阵列为高密度微棱台阵列,包括如下步骤
77.(1)采用光刻法加工高密度微棱台阵列硅模版(阵列密度250000mm-2
),其中光刻胶采用s1813,曝光剂量为150mj/cm2,采用30%koh和10%ipa的水溶液刻蚀硅片。
78.优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。例如,将所制备的微棱台阵列硅模版先后分别用洗涤剂、去离子水和乙醇进行超声清洗30min。
79.(2)将洁净的微棱台阵列硅模版用ar/o2等离子体处理,具体参数为:功率300w,ar流量100sccm,o2流量100sccm,等离子清洗时间3min。将所需的pi预聚液在真空条件下除泡至少30min。在所制备的微棱台阵列硅模版上旋涂pi预聚液,旋涂参数为1000r/s,旋涂时间为60s。将旋涂后的pi预聚液分段固化,具体参数为90℃保温1h,120℃保温1h,得到微棱台阵列基底。将固化的微棱台阵列基底在常温下超声30min,使其从的微棱台阵列硅模版上剥离。
80.(3)通过磁控溅射的方法用微棱台阵列基底制备微棱台列au电极,au电极的厚度为0.1μm,所制备的高密度微棱台阵列电极sem图如图7所示。
81.(4)将高密度微棱台阵列au电极与介电弹性体pdms通过pi装成电容式力敏传感器,得到基于高密度微结构阵列电极的力敏传感器。
82.实施例7:
83.本发明的一个实施例,为一种基于高密度微结构阵列电极的力敏传感器的制备方法,其中高密度微结构阵列为高密度微圆锥阵列,包括如下步骤
84.(1)采用光刻法加工高密度微圆锥阵列硅模版(阵列密度250000mm-2
),其中光刻胶
采用s1813,曝光剂量为150mj/cm2,采用30%koh和10%ipa的水溶液刻蚀硅片。
85.优选地,在另一个实施例中,在对所制备的高密度微结构阵列模版进行等离子处理之前,还对高密度微结构阵列模版进行清洗。例如,将所制备的微圆锥阵列硅模版先后分别用洗涤剂、去离子水和乙醇进行超声清洗30min。
86.(2)将洁净的微圆锥阵列硅模版用ar/o2等离子体处理,具体参数为:功率300w,ar流量100sccm,o2流量100sccm,等离子清洗时间3min。将所需的pi预聚液在真空条件下除泡至少30min;在所制备的微圆锥阵列硅模版上旋涂pi预聚液,旋涂参数为1000r/s,旋涂时间为60s。将旋涂后的pi预聚液分段固化,具体参数为90℃保温1h,120℃保温1h。将固化的微圆锥阵列pi基底在常温下超声30min,使其从微圆锥阵列硅模版上剥离。
87.(3)在所制备的微圆锥阵列pi基底上盖上叉指电极金属掩模版,通过热蒸镀的方法制备微圆锥阵列cu电极,cu电极的厚度为1μm。
88.(4)将所制备的高密度微圆锥阵列cu电极与压阻式力敏材料velostat通过有机硅胶pdms封装成压阻式力敏传感器,得到基于高密度微结构阵列电极的力敏传感器。
89.图8为本实施例所制备的基于高密度微结构阵列电极的力敏传感器的力学灵敏度响应图。其中横坐标代表对压阻力敏传感器施加的压力,纵坐标代表压阻传感器的电流变化率。可以看出,该力敏传感器在不同压力下的电流变化率与所受压力成线性关系,,具有较高的力学灵敏度。
90.现有的提高力敏传感器灵敏度和响应时间的方法都侧重于构建力敏材料的周期性微结构阵列,相比而言,本发明提供的基于高密度微结构阵列电极的力敏传感器的制备方法,通过构建高密度微结构阵列电极,从电极的角度出发构建力敏材料具有普适性和通用性,极大地提高了力学传感器的灵敏度、减少了传感器的响应时间,且具有良好的力学时间稳定性。
91.虽然本发明已以较佳实施例公开如上,但实施例并不是用来限定本发明的。在不脱离本发明之精神和范围内,所做的任何等效变化或润饰,同样属于本发明之保护范围。因此本发明的保护范围应当以本技术的权利要求所界定的内容为标准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1