基于柔性金属有机框架混合基质膜的嗅觉可视化传感器及其制备和应用
1.本发明涉及嗅觉可视化感知领域,具体涉及一种基于柔性金属有机框架混合基质膜的嗅觉可视化传感器及其制备和应用。
背景技术:
2.挥发性有机化合物(volatile organic compounds,vocs)是指沸点介于50-260℃,室温下饱和蒸气压超过133.32pa的一类挥发性化合物,主要包括卤代烃类、醇类、多环芳烃类、烷烃类、酮类、烯烃类、醚类、脂类、硫烃类等。vocs广泛存在于室外与室内环境中,室外vocs主要来源于工业废气如化学工业、染料燃烧产物如煤炭燃烧等,而在室内,vocs主要来自油漆、杀虫剂、建筑家具和材料等。这些vocs造成的大气污染成为人类健康的主要杀手,大部分vocs是有害甚至致癌的,如苯系化合物,可能对人体中枢神经造成损伤,导致神经系统紊乱。因此对这些vocs的高敏快速检测显得极为重要。嗅觉可视化技术是将多种气敏材料固定在基底材料上以构建可视化传感器阵列,传感器阵列与样品的挥发性气体之间会发生变色效应,从而实现气味信息的“可视化”,是一种操作简单、响应快速的检测方法。与传统的vocs检测方法(如气相色谱-质谱法等)相比,具有快速、操作简单和便携的优点,因此近年来常被用于vocs的检测。
3.目前,嗅觉可视化技术中的气敏材料常采用多种类型的染料,包含ph染料、卟啉类染料、氧化还原类染料、气致变色染料等。但是,染料作为气敏材料往往只对具有氧化还原特性或酸碱特性的气体产生强烈信号,而对不具上述特征的气体(如乙醇、丙酮、甲苯等)并不敏感,在vocs的检测方面存在局限性。柔性金属有机框架(metal-organic frameworks,mofs)材料是一种受到外界化学刺激(客体吸附/脱附/交换)产生结构变化的金属有机框架材料。由于柔性mof具有孔道可调的特性,当气体分子进入柔性mof的孔道内时,会引起其孔径发生变化,宏观上的表现为柔性mof的颜色发生变化。对于不同种类的vocs,其会呈现不同程度的颜色变化。与染料相比,柔性mof在非氧化还原性气体的检测中具有明显优势。除此以外,柔性mof材料的多孔状结构具有比表面积大的优点,可以吸附富集vocs气体,有效提高检测的灵敏度。柔性mof对vocs的吸附和去除具有可逆性,其作为气敏材料所制备的比色传感阵列可以重复利用。
4.柔性mof作为一种晶体材料,在制备比色传感器的过程中,往往存在成膜性差的问题。因为mof晶体的颗粒感强,受到微晶体成型因子的限制,在有机试剂挥发后,制备的mof膜结构松散,极易在检测气氛中脱离,影响检测的准确性。其次,晶体材料制备得到膜的均匀性较差,使得单个气敏单元内的多位点信号差别大,造成检测结果误差大。因此开发一种均匀稳定的柔性金属有机框架嗅觉可视化传感器检测vocs势在必行。
技术实现要素:
5.针对上述技术问题以及本领域存在的不足之处,本发明提供了一种基于柔性金属
有机框架混合基质膜的嗅觉可视化传感器,克服了传统色敏材料染料分子对非氧化还原气体不敏感和柔性mof材料本身成膜性差的问题。
6.一种基于柔性金属有机框架混合基质膜的嗅觉可视化传感器,包括基底和位于所述基底上的若干个柔性mof/pvdf(聚偏氟乙烯)膜;
7.所述柔性mof为气敏变色材料。
8.将柔性mof与pvdf混合在一起可诱导二者产生非共价键(氢键,π-π堆积)提高柔性mof颗粒之间的连接能力,从而增强柔性mof的成膜性。制备得到的膜既保留了聚合物的柔性,又保留了柔性mof对气体的吸附以及显色的特性。
9.柔性mof的种类不同,常态下表现出的颜色也会不同。
10.柔性mof对气体具有优异的吸附性能。由于柔性mof具有独特的柔性可变结构,吸附后的气体分子会进入到mof的孔道内,改变mof的孔道尺寸,在宏观上表现为mof的颜色发生变化。
11.针对不同的气体,同一种mof的颜色变化不同;针对同一种气体的不同浓度,mof的颜色变化也不同。因此可以根据mof的颜色变化进行vocs的检测。
12.作为优选,各柔性mof/pvdf膜中的柔性mof分别独立选自cd(pnmi)、mil-88b(fe)、mil-53(fe)、dut-8(ni)、[cu2(bdc)2(bpy)]n、[cu2(bdc)2(bpe)]n、co(5-nh
2-bdc)(bpy)n、mil-53(al)中的一种或多种。
[0013]
上述罗列的具体种类的柔性mof均为现有技术,均可采用已知的制备方法制备得到。其中,[cu2(bdc)2(bpy)]n、[cu2(bdc)2(bpe)]n、co(5-nh
2-bdc)(bpy)n中的n分别独立为正整数。
[0014]
在一优选例中,所述基底透明,优选自聚对苯二甲酸乙二醇酯(pet)膜、聚氯乙烯(pvc)膜或聚碳酸酯(pc)膜。
[0015]
所述柔性mof/pvdf膜的形状、大小不做特别限定,可根据需要进行设计,如3mm*3mm的正方形等。
[0016]
本发明还提供了所述的嗅觉可视化传感器的制备方法,包括:将柔性mof均匀分散在pvdf溶液中得到粘度为100~600pa.s的打印液,利用点胶机打印在基底上,干燥成膜,得到所述的嗅觉可视化传感器。
[0017]
按上述要求严格控制打印液粘度才能保证柔性mof/pvdf膜的成膜质量,否则难以成膜或膜易损坏、稳定性差。
[0018]
此外利用点胶机相对较高的分辨率以及均匀的沉积速度的特性将柔性mof-pvdf混合溶液(即所述打印液)沉积在基底材料表面,改善了柔性mof的成膜性和沉积均匀性,从而改善了嗅觉可视化传感器的稳定性。
[0019]
作为优选,所述pvdf溶液中的溶剂为dmf(n,n-二甲基甲酰胺)、二氯甲烷、三氯甲烷中的一种或多种。
[0020]
当所述pvdf溶液中的溶剂为dmf时,所述pvdf溶液中pvdf的浓度优选为75~80mg/ml,通过严格控制pvdf和dmf的比例,可进一步提高柔性mof/pvdf膜的成膜效果和膜的稳定性。
[0021]
在一优选例中,所述点胶机的工作条件为:行走速度10mm/s,压强30~100kpa,针头内径110μm(32g),线间距0.2mm。
[0022]
所述制备方法中,柔性mof的加入量除了影响气敏变色效果外,对柔性mof/pvdf膜的成膜质量也会有一定的影响。作为优选,以柔性mof、pvdf质量之和为100%计,柔性mof的质量占比不超过70%,可较好地保证膜的完整性、稳定性。
[0023]
本发明还提供了所述的嗅觉可视化传感器在气体检测中的应用。所述气体包括非氧化还原类vocs。
[0024]
本发明与现有技术相比,主要优点包括:
[0025]
1、相比于传统染料比色传感单元,本发明制备的基于柔性金属有机框架混合基质膜的嗅觉可视化传感器无需染料,且可用于非氧化还原类vocs的检测,检测气体种类更为广泛。
[0026]
2、由于mof本身是晶体材料,所以无另外添加剂的纯mof混合液无法直接作为打印液,因此基本只能采用滴涂法成膜,而滴涂法本身效率又低、可控性又差,且制备的纯mof膜同样由于mof本身晶体材料性质的限制,导致所得膜结构松散、均匀性差、易损、不稳定,检测结果误差大,精确性有待提升。本发明的柔性mof-pvdf混合基质膜法可以显著改善柔性mof的成膜特性,通过对打印液的优化改良,使之可以与点胶机完美适配,打印效率显著提升,重复性、可控性好,成膜质量高,可显著提高传感器的准确性和稳定性。
附图说明
[0027]
图1为实施例3的mil-53(fe)-pvdf混合基质膜的表面扫描电镜(sem)照片;
[0028]
图2为实施例3的mil-53(fe)-pvdf混合基质膜的fe元素的x射线能谱(eds)图;
[0029]
图3为实施例7制备的比色传感阵列照片;
[0030]
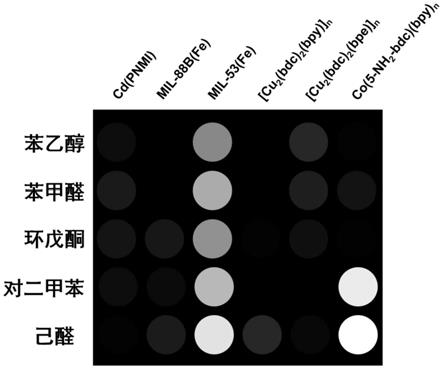
图4为实施例7制备的比色传感阵列检测苯乙醇、苯甲醛、环戊酮、对二甲苯和己醛气体前后的颜色差值图。
具体实施方式
[0031]
下面结合附图及具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。下列实施例中未注明具体条件的操作方法,通常按照常规条件,或按照制造厂商所建议的条件。
[0032]
实施例1 cd(pnmi)-pvdf混合基质膜的比色传感单元制备
[0033]
将75mg pvdf溶解在0.95ml dmf中搅拌过夜,得到粘稠的溶液,然后将175mg cd(pnmi)加入到上述溶液中,继续搅拌24h,在沉积之前,将溶液间断超声三次,每次15min。点胶机的工作条件为:行走速度为10mm/s,压强为30kpa,针头内径为110μm,线间距为0.2mm。利用点胶机按照上述条件将cd(pnmi)-pvdf混合溶液沉积在pet表面得到cd(pnmi)-pvdf混合基质膜的比色传感单元。
[0034]
实施例2 mil-88b(fe)-pvdf混合基质膜的比色传感单元制备
[0035]
将75mg pvdf溶解在0.95ml dmf中搅拌过夜,得到粘稠的溶液,然后将112.5mg mil-88b(fe)加入到上述溶液中,继续搅拌24h,在沉积之前,将溶液间断超声三次,每次15min。点胶机的工作条件为:行走速度为10mm/s,压强为50kpa,针头内径为110μm,线间距为0.2mm。利用点胶机按照上述条件将mil-88b(fe)-pvdf混合溶液沉积在pet表面得到mil-88b(fe)-pvdf混合基质膜的比色传感单元。
[0036]
实施例3 mil-53(fe)-pvdf混合基质膜的比色传感单元制备
[0037]
将75mg pvdf溶解在0.95ml dmf中搅拌过夜,得到粘稠的溶液,然后将175mg mil-53(fe)加入到上述溶液中,继续搅拌24h,在沉积之前,将溶液间断超声三次,每次15min。点胶机的工作条件为:行走速度为10mm/s,压强为30kpa,针头内径为110μm,线间距为0.2mm。利用点胶机按照上述条件将mil-53(fe)-pvdf混合溶液沉积在pet表面得到mil-53(fe)-pvdf混合基质膜的比色传感单元。从图1可以看出纺锤体结构的mil-53(fe)与pvdf连接在一起,由于pvdf的加入,大大提高了mil-53(fe)之间的连接能力。图2的eds中fe元素的分布情况则进一步说明mil-53(fe)在膜内的均匀分布。
[0038]
实施例4[cu2(bdc)2(bpy)]
n-pvdf混合基质膜的比色传感单元制备
[0039]
将75mg pvdf溶解在0.95ml dmf中搅拌过夜,得到粘稠的溶液,然后将75mg[cu2(bdc)2(bpy)]n加入到上述溶液中,继续搅拌24h,在沉积之前,将溶液间断超声三次,每次15min。点胶机的工作条件为:行走速度为10mm/s,压强为50kpa,针头内径为110μm,线间距为0.2mm。利用点胶机按照上述条件将[cu2(bdc)2(bpy)]
n-pvdf混合溶液沉积在pet表面得到[cu2(bdc)2(bpy)]
n-pvdf混合基质膜的比色传感单元。
[0040]
实施例5[cu2(bdc)2(bpe)]
n-pvdf混合基质膜的比色传感单元制备
[0041]
将75mg pvdf溶解在0.95ml dmf中搅拌过夜,得到粘稠的溶液,然后将75mg[cu2(bdc)2(bpe)]n加入到上述溶液中,继续搅拌24h,在沉积之前,将溶液间断超声三次,每次15min。点胶机的工作条件为:行走速度为10mm/s,压强为100kpa,针头内径为110μm,线间距为0.2mm。利用点胶机按照上述条件将[cu2(bdc)2(bpe)]
n-pvdf混合溶液沉积在pet表面得到[cu2(bdc)2(bpe)]
n-pvdf混合基质膜的比色传感单元。
[0042]
实施例6 co(5-nh
2-bdc)(bpy)
n-pvdf混合基质膜的比色传感单元制备
[0043]
将75mg pvdf溶解在0.95ml dmf中搅拌过夜,得到粘稠的溶液,然后将175mg co(5-nh
2-bdc)(bpy)n加入到上述溶液中,继续搅拌24h,在沉积之前,将溶液间断超声三次,每次15min。点胶机的工作条件为:行走速度为10mm/s,压强为30kpa,针头内径为110μm,线间距为0.2mm。利用点胶机按照上述条件将co(5-nh
2-bdc)(bpy)
n-pvdf混合溶液沉积在pet表面得到co(5-nh
2-bdc)(bpy)
n-pvdf混合基质膜的比色传感单元。
[0044]
实施例7比色传感阵列的制备
[0045]
如图3所示,以6个小方形为一个比色传感阵列,将实施例1~6中的mof-pvdf溶液按照第一行为cd(pnmi),mil-88b(fe)和mil-53(fe),第二行为[cu2(bdc)2(bpy)]n,[cu2(bdc)2(bpe)]n,co(5-nh
2-bdc)(bpy)n的顺序沉积在pet膜表面,形成若干个比色传感阵列,每个比色传感阵列中同一行相邻单元的间隔为1.5mm,上下两行的间隔为2mm。
[0046]
测试例
[0047]
将实施例7中制备得到的比色传感阵列在热台上70℃加热30min,室温条件下冷却5min,通过扫描仪对比色传感阵列进行数据采集,记录当下比色传感器的颜色数据。在检测气体之前,对反应装置进行30min预通气,气体浓度为:500ppm。然后将比色传感阵列放置在气体反应腔室中,反应15min,然后利用扫描仪对比色传感阵列进行数据采集,记录当下传感器的颜色数据。对反应前后的数据进行处理,计算欧氏距离(反应前后传感器的响应值)。该传感器对五种vocs(苯乙醇,苯甲醛,环戊酮,己醛和对二甲苯)的响应数据如图4所示。
[0048]
从比色传感阵列检测气体前后的颜色变化图可以看出,同一种mof对于不同的气
体所表现出的颜色变化不同,其次不同mof对于同一种气体所表现的颜色变化也存在差异,因此,将不同mof组合起来制备的比色传感阵列可以实现多种气体的可视化检测,并进行特异性区分。
[0049]
此外应理解,在阅读了本发明的上述描述内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1