UWB测距误差的分析和改进方法、系统及存储介质与流程
uwb测距误差的分析和改进方法、系统及存储介质
技术领域
1.本发明涉及uwb测距技术领域,尤其涉及一种uwb测距误差的分析和改进方法、系统及存储介质。
背景技术:
2.在基于超宽带(ultra wideband,uwb)的测距定位算法中,主要分为到达时间差定位法(time difference of arrival,tdoa)和到达时间测距法(time of arrival,toa)。tdoa定位法要求所有定位基站保持严格的时间同步,工程上难以实施。因此,基于uwb的定位法通常采用toa测距算法。单程测距,双程测距,单边双向测距,双边双向测距都是最常用的toa估计的测距协议。其中,业界应用最为广泛的是双边双向测距算法(double-sided two-way ranging)。该算法的基本原理是定位标签和多个基站进行测距操作(如图1所示),然后通过三角定位,假设定位标签点及基站坐标点可形成一个三角形,通过计算三角形边的长度来测量基站与定位标签点形成的角度,即可计算出定位标签的实时坐标,如图2所示。其本质是通过测量收发节点之间信号的飞行时间(time of flight,tof)乘以光速来计算距离。同时,测距双方通过两次信号的交互,消除因为双方时钟误差不同而造成的测距误差。但是在实际应用的过程中,该算法在消除了测距设备因为时钟误差导致的测距误差后,测距效果仍然不是很理想,在没有障碍物的环境下,定位精度范围在40cm左右。
3.经过大量测试,uwb测距过程产生误差的主要来源分为以下几种:1)时钟漂移:在测距过程中,不同的时间戳需要通过信号的发送来记录的。在实际情况下,由于客观因素(例如设备材质工艺,以及环境温度等)的存在,会导致收发设备时钟频率些许不同,即时钟漂移现象,因此会导致接收设备获得信号的时间信息不准确。2)读取信号收发时间的误差:设备在读取信号发送、接收时间戳的时候,会存在一个呈现白噪音分布状态的误差,其值在(3e-10)秒左右。如果某设备发送信号的时间为t秒,则设备实际读取到的信号发送时间可能是:t-(3e-10)秒至t+(3e-10)秒之间的任意值。设备进行一次测距至少需要一次信息交互,即分别读写2次。因此,在最恶劣的情况下,误差值为(3e-10)*4*c=0.36米。由于现有的时间漂移纠偏算法都是建立在设备成功读取了正确的收发时间的基础上,因此读取信号产生的时间误差将会导致时钟漂移纠偏过程出现偏差。
4.经过上述分析可知,原双边双向测距算法只能降低由于时钟漂移而产生的误差,而由于读取信号收发时间的误差导致的偏误,以及同时造成的时间偏移的纠偏误差并无法消除。
技术实现要素:
5.鉴于此,本发明的目的在于提供一种uwb测距误差的分析和改进方法,能够有效减少测距过程产生的误差,进而提高定位的精度。
6.为实现上述发明目的,本发明第一方面提供一种uwb测距误差的分析和改进方法,包括以下步骤:
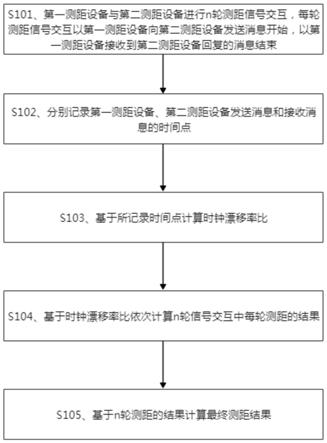
7.s101、第一测距设备与第二测距设备进行n轮测距信号交互,每轮测距信号交互以第一测距设备向第二测距设备发送消息开始,以第一测距设备接收到第二测距设备回复的消息结束;
8.s102、分别记录第一测距设备、第二测距设备发送消息和接收消息的时间点;
9.s103、基于所记录时间点计算时钟漂移率比;
10.s104、基于时钟漂移率比依次计算n轮信号交互中每轮测距的结果;
11.s105、基于n轮测距的结果计算最终测距结果。
12.进一步的,每轮信号交互中,第一测距设备接收第二测距设备回复的消息和第二测距设备接收第一测距设备发送的消息均经过滤波器过滤。
13.进一步的,记录第一测距设备每次发送消息的时间点为τas1,τas2,...,τasn,每次接收消息的时间点为τar1,τar2,...,τarn;第二测距设备每次发送消息的时间点为τbs1,τbs2,...,τbsn,每次接收消息的时间点为τbr1,τbr2,...,τbrn,基于所记录时间点计算时钟漂移率比,其计算公式如式(1)所示,
14.w=(τasn-τas1)/(τbrn-τbr1)
ꢀꢀꢀ
(1)
15.其中w为时钟漂移率比,n为信号交互轮数。
16.进一步的,所述基于时钟漂移率比依次计算n轮信号交互中每轮测距的结果,具体包括:
17.计算从第一测距设备发送消息到第二测距设备接收到消息所经过的时间t
roundan
;
18.计算从第二测距设备接收到第一测距设备发送的消息到第二测距设备回复消息的时间t
replybn
;
19.根据t
roundan
、t
replybn
和时钟漂移率比计算相应轮次的信号飞行持续时间,其中n表示信号交互轮次;
20.根据信号飞行持续时间和信号传输速度计算相应轮次的测距结果。
21.进一步的,所述基于n轮测距的结果计算最终测距结果,具体包括以下步骤:
22.判断信号交互轮数n是否为奇数,若n为奇数,则最终测距结果l通过式(2)进行计算:
23.l=l
(n+1)/2
ꢀꢀꢀ
(2);
24.若n为偶数,则最终测距结果通过式(3)进行计算:
[0025][0026]
本发明第二方面提供一种uwb测距误差的分析和改进系统,所述系统包括:第一测距设备、第二测距设备、记录模块、第一计算模块、第二计算模块和第三计算模块,其中:
[0027]
所述第一测距设备用于和第二测距设备进行n轮信号交互,每轮信号交互,以第一测距设备向第二测距设备发送消息开始,以第一测距设备接收到第二测距设备回复的消息结束;
[0028]
所述记录模块用于分别记录第一测距设备、第二测距设备发送消息和接收消息的时间点;
[0029]
所述第一计算模块用于基于记录模块所记录的时间点计算时钟漂移率比;
[0030]
所述第二计算模块用于基于时钟漂移率比依次计算n轮信号交互中每轮测距的结果;
[0031]
所述第三计算模块用于基于n轮测距的结果计算最终测距结果。
[0032]
本发明第三方面提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时,实现前述第一方面所述的方法。
[0033]
与现有技术相比,本发明的有益效果是:
[0034]
1、本发明通过在测距设备之间进行多轮测距信号交互来减少系统造成的时间漂移的误差;
[0035]
2、通过计算时钟漂移率比,在时钟漂移率比的基础上进一步计算出多轮测距的结果,根据多轮测距的结果计算最终测距结果,以此来消除由于设备读取收发信号存在的误差,使得本发明所提供的方法的定位精度远优于传统的双边双距测距算法。
附图说明
[0036]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0037]
图1是现有技术中定位标签和多个基站测距组网示意图。
[0038]
图2是现有技术中toa定位原理示意图。
[0039]
图3是本发明实施例提供的一种uwb测距误差的分析和改进方法整体流程示意图。
[0040]
图4是本发明实施例提供的一种uwb测距误差的改进方法原理示意图。
[0041]
图5是本发明实施例提供的一种uwb测距误差的分析和改进系统整体结构示意图。
[0042]
图6是现有技术中单向测距算法测距结果示意图。
[0043]
图7是现有技术中双向测距算法测距结果示意图。
[0044]
图8是本发明实施例提供的改进方法十次交互测距结果示意图。
[0045]
图9是本发明实施例提供的改进方法百次交互测距结果示意图。
[0046]
图中,1第一测距设备,2第二测距设备,3记录模块,4第一计算模块,5第二计算模块,6第三计算模块。
具体实施方式
[0047]
以下结合附图对本发明的原理和特征进行描述,所列举实施例只用于解释本发明,并非用于限定本发明的范围。
[0048]
参照图3和图4,本实施例提供一种uwb测距误差的分析和改进方法,所述方法包括以下步骤:
[0049]
s101、第一测距设备与第二测距设备进行n轮测距信号交互,每轮测距信号交互以第一测距设备向第二测距设备发送消息开始,以第一测距设备接收到第二测距设备回复的消息结束。
[0050]
示例性地,第一测距设备首先发送消息给第二测距设备,第二测距设备接收到消
息后立即向第一测距设备回复消息,依此循环n个轮次。第一测距设备和第二测距设备所接收的消息均通过过滤器进行过滤,从而过滤掉过多的噪声干扰。
[0051]
s102、分别记录第一测距设备、第二测距设备发送消息和接收消息的时间点。
[0052]
s103、基于所记录时间点计算时钟漂移率比。
[0053]
s104、基于时钟漂移率比依次计算n轮信号交互中每轮测距的结果。
[0054]
s105、基于n轮测距的结果计算最终测距结果。
[0055]
具体的,步骤s102中,依次记录第一测距设备每次发送消息的时间点为τas1,τas2,...,τasn,依次记录第一测距设备每次接收消息的时间点为τar1,τar2,...,τarn。依次记录第二测距设备每次发送消息的时间点为τbs1,τbs2,...,τbsn,依次记录第二测距设备每次接收消息的时间点为τbr1,τbr2,...,τbrn。步骤s103中,基于所记录时间点计算时钟漂移率比,其计算公式如式(1)所示,
[0056]
w=(τasn-τas1)/(τbrn-τbr1)
ꢀꢀꢀ
(1)
[0057]
其中w为时钟漂移率比,n为信号交互轮数。
[0058]
步骤s104中,基于时钟漂移率比依次计算n轮测距信号交互中每轮测距的结果,具体包括以下步骤:
[0059]
计算从第一测距设备发送消息到第二测距设备接收到消息所经过的时间t
roundan
,如下式所示:
[0060]
t
roundan
=τ
arn-τ
asn
[0061]
其中n表示轮次,τ
arn
为该轮次第一测距设备接收消息的时间点,τ
asn
为该轮次第一测距设备发送消息的时间点。
[0062]
计算从第二测距设备接收到第一测距设备发送的消息到第二测距设备回复消息的时间t
replybn
,如下式所示:
[0063]
t
replybn
=τ
bsn-τ
brn
[0064]
其中n表示轮次,τ
brn
为该轮次第二测距设备接收消息的时间点,τ
bsn
为该轮次第二测距设备发送消息的时间点。
[0065]
根据t
roundan
、t
replybn
和时钟漂移率比计算相应轮次的信号飞行持续时间,信号飞行持续时间t
tof
的表达式如下式所示:
[0066]
t
tof
=(t
roundan
–
t
replybn
*w)/2
[0067]
根据信号飞行持续时间和信号传输速度计算相应轮次的测距结果,第n轮次的测距结果ln的表达式如下式所示:
[0068]
ln=t
tof
*c
[0069]
其中c表示信号传输速度,本实施例中c取光速值。
[0070]
步骤s105中,所述基于n轮测距的结果计算最终测距结果,具体包括以下步骤:
[0071]
判断信号交互轮数n是否为奇数,若n为奇数,则最终测距结果l通过式(2)进行计算:
[0072]
l=l
(n+1)/2
ꢀꢀꢀ
(2)
[0073]
即当测距信号交互轮数为奇数时,取多轮测距结果的中位数作为最终测距结果。
[0074]
若n为偶数,则最终测距结果通过式(3)进行计算:
[0075][0076]
作为一种可选的实施方式,在执行前述实施例所述的方法的过程当中,还检测定位标签本身的移动速度是否超出预设阈值,若超出预设阈值则发出提示信息并终止执行方法,因为若定位标签本身处于高速移动状态下会导致测距过程失去意义。
[0077]
在本发明的一个具体实施例中,将所述方法在实际环境中进行了测试,其中测试结果如表1所示,当测距信号交互次数为10次时,每次测距耗时25毫秒,定位精度在0.05米以内,适用于在机器人移动时使用该方法对其进行定位。当测距信号交互次数为100次时,每次测距耗时250毫秒,定位精度在0.03米以内,适用于在机器人静止时使用该方法对其进行定位。
[0078]
表1本实施例所提供算法测试结果
[0079]
信号交互次数n每次测距耗时精度适宜场景1025ms0.05m机器人运动时使用100250ms0.03m机器人静止时使用
[0080]
参照图6~图9,图6中的单向测距算法和图7中的双向测距算法的测距结果均有较大幅度的波动并且误差较大,从图8和图9可以看出本实施例所提供的方法测距结果相较于前述两种算法更加稳定且误差更小,同时百次交互的结果相较十次交互的测距结果更加平稳,从表2中也可以看出,本实施例所提供的改进算法十次交互及百次交互的均方差分别为0.00857和0.0044878,均远小于单向测距算法和双向测距算法测距结果的均方差,说明其测距结果波动较小,且误差相对较小。
[0081]
表2测量距离结果值
[0082][0083]
本实施例所提供的方法藉由测距双方多次信号的交互,成功消除了大部分因为双方时钟误差不同而造成的测距误差,定位精度从0.4米提升到0.03米内,对比传统的双边双距算法有了较大的提升。
[0084]
基于与前述方法实施例相同的发明构思,本发明另一实施例提供了一种uwb测距误差分析和改进系统,参照图5,所述系统包括第一测距设备1、第二测距设备2、记录模块3、第一计算模块4、第二计算模块5和第三计算模块6,其中:
[0085]
所述第一测距设备1用于和第二测距设备2进行n轮信号交互,每轮信号交互,以第一测距设备1向第二测距设备2发送消息开始,以第一测距设备1接收到第二测距设备2回复的消息结束。
[0086]
所述记录模块3用于分别记录第一测距设备1、第二测距设备2发送消息和接收消息的时间点。
[0087]
所述第一计算模块4用于基于记录模块所记录的时间点计算时钟漂移率比。
[0088]
所述第二计算模块5用于基于时钟漂移率比依次计算n轮信号交互中每轮测距的结果。
[0089]
所述第三计算模块6用于基于n轮测距的结果计算最终测距结果。
[0090]
所述系统用于实现前述方法实施例所述的方法,其工作原理和技术效果均可以参照前述方法实施例,在此不再赘述。
[0091]
本发明另一实施例还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实现前述方法实施例所述的方法。
[0092]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1