预测和消除波束域中的多次波的计算机程序产品和方法与流程
1.本发明大体上涉及计算机实现的方法和系统,用于使用压缩感测方法并采用波束域鬼波压制算子来在地震勘探和处理期间在波束域中预测或消除表面反射。
背景技术:
2.1.概述
3.地震勘探也称为地震勘测,其涉及对感兴趣的地下地层和地质结构的研究。通常来说,地震勘探的目的是对勘测区域的地下进行成像,以识别地下碳氢化合物的潜在位置。
4.在地震勘探中,一个或多个地震能量源被放置在地面附近的不同位置,以产生波形式的信号,该信号向下传播穿过地球,同时进入地下地层,如岩石和洞穴。一旦由所发射的地震能量而产生的波进入地下地层,它们就会在整个地下反射、折射或散射,然后被记录、采样或测量所述波的接收传感器所捕获。所记录的波在本领域中通常称为地震数据或地震道。这些数据或道可能包含与正在勘测的勘测区域的地质结构和特性有关的信息。然后对它们进行分析,以提取正在勘测的地球勘探区域的结构和特性的详细信息。
5.地震勘探是地质分析的第一阶段,以在地下寻找碳氢化合物。它的基础是弹性波在分层固体半空间中的透射、反射、折射和散射的经典物理原理。自1925年以来,这些方法应用的大量增加及对其不断改进的努力导致了仪器、方法、系统和解释技术的完善和改进。因为它能够绘制数千英尺深的地床并检测几英尺量级的深度变化,因此它是地球物理勘探的最昂贵的方法,也是最有用的方法。基本程序包括通过近地表爆炸产生弹性波,记录在不同距离处到达地表的所产生的波,并通过分析可识别波群的传播时间和特征来推断反射和折射界面的位置。使用折射波的技术与基于反射波的技术完全不同。本领域已知的一些常见的地球物理勘探技术包括:
6.a)地震法;
7.b)重力法;
8.c)磁法;
9.d)电法;
10.e)放射性方法;
11.f)测井法;和
12.g)电磁法。
13.勘探是基于通过人工手段来对在地球中产生的弹性波的分析。在突发扰动期间产生的弹性波通常被称为地震波。这些地震波通过地震仪等仪器记录下来,所得到的记录就是地震图。因此,它是一种重要的地球物理勘探方法,适用于油气藏勘探、深层地下水勘探、深度估算或岩土工程问题。本领域技术人员将认识到,可以通过折射或反射两种方法来进行地震勘探。
14.折射爆炸法仅适用于绘制速度大于其上方速度的地床。炮点到探测器的距离必须比地床的深度大几倍,这是因为折射波必须在最短的时间路径上穿过地床的相当大的水平
basis and practical solutions,leading edge,vol.10,pp.1429-34),以及衰减方位各向异性的振幅-方位角反演(shekar,bharath&tsvankin,ilya,(2012),attenuation analysis for heterogeneous transversely isotropic media,pp.1-6,10.1190/segam2012-1489.1)也都使用叠前地震方位道集,用来表征裂缝性储层参数。
24.另一方面,从地震振幅和振幅-偏移量(avo)来预测碳氢化合物仍然是一项艰巨的任务。一种方法是使用地震反射来将它们与地下岩石特性密切关联。然而,地震数据中最强的avo通常是由岩石中的碳氢化合物饱和度所引起的。使用叠前地震反演以提取地震数据的关于地下弹性参数的信息的进展极大地帮助了表征岩相和以最小的误差来预测储层性质,从而减少了世界某些盆地的干井数量和钻井风险(例如参见russel,b.,2014,prestack seismic amplitude analysis:an integrated overview:interpretation,v.2,no.2,sc19-sc36)。这种叠前地震反演模型已常规应用于岩性预测和流体检测,以识别油气勘探的潜在目标。最近,它已被广泛用于估计非常规页岩气应用中的甜蜜点,但在存在多次波的情况下,这成为一项具有挑战性的任务,这是因为所引入的误差和伪影将严重损害迁移、反射层析成像和速度估计过程。
25.3.地表相关多次波消除(srme)的应用
26.地表相关多次波是从其震源或入射点开始传播后在勘测区域的表面处向下反射的反射波。由于勘测区域上特定位置处的炮点或入射点,这些反射由位于接收器点位置处的接收器或接收传感器来记录。因此,本领域的技术人员很容易看出,这种地表相关多次波事件可以被认为是两个事件的组合:(a)由于某个入射点处的爆炸而在第一次表面反射处记录的事件;以及(b)在第一次表面反射发生后在不同的位置处记录的事件。这两个事件都是在陆地或海上独立记录的,并且由地面爆炸或船舶从左向右的移动而发生。当接收传感器已经观测到第一次表面反射的位置时(即已知发生了表面多次波的向下反射),可以通过对已经记录的单个事件进行卷积来预测多次波。但是很明显,这里在接收传感器能够找到第一次表面反射的位置之前存在着挑战,为此,本领域已知的计算机实现方法通常对所有可能的位置执行单个事件的卷积,假设或估计第二次表面反射。因此,对于给定的震源-接收器对进行所有可能的射线路径组合,并计算每个事件的总传播时间。根据费马原理,震源-接收器对的多次波就成为传播时间最短的事件。因此,srme中的基本操作是数据与其自身的时空卷积。这给出了地表相关多次波的正确运动,同时估计多次波模型并从输入数据中自适应地将其减去。然而,本领域的普通技术人员很快就会意识到,从地震反射数据中消除自由表面多次波是地震成像中的必不可少的预处理步骤。然而,由于地球或水底的高的速度对比,第一层多次波趋于缓慢衰减,并且会严重降低大部分地震图的质量。此外,在结构复杂的3d沉积体上会生成微屈多次波,以产生一组复杂的混响,它们很容易掩盖来自相对较弱的沉积反射层的初级反射。
27.典型的地表相关多次波消除分三步来应用(verschuur,d.j.,and berkhout,a.j.,1997,estimation of multiple scattering by iterative inversion,part ii:practical aspects and examples,geophysics vol.62,1596-1611;以及berkhout,a.j.,1982,seismic migration,imaging of acoustic energy by wavefield extrapolation,vol.14a:theoretical aspects,elsevier,amsterdam)。第一步包括通过去除所有非物理噪声来对任何获取的数据(例如图像道集)进行预处理;然后对所获取的数据进行正则化,
获得震源和接收器位置的恒定网格;然后对丢失的近偏移距和中间偏移距进行插补;然后去除直达波及其表面反射。由于该方法是数据驱动的,多次去除后的数据质量在很大程度上取决于该预处理步骤,因此本领域的技术人员已经开发了考虑了勘探地区特征的非常多的预处理的替代方案。
28.第二步涉及预测或估计多次波,其基于这样的观点:任何地表相关多次波都可以通过测量波场与其自身的时空卷积来预测(berkhout,a.j.,同上)。
29.在最后一步中,本领域的技术人员使用最小能量标准(其规定在减去多次波之后地震图中的总能量应最小化)从图像道集数据中减去或消除所预测的多次波。
30.尽管如此,很长一段时间以来,srme方法一直被认为是有前途的,但成本太高且难以在生产中运行,需要高度的计算处理能力。然而,由于计算机性能的提高和对关键数据准备步骤的更多理解,该方法似乎正在朝着更广泛的应用方向发展,它甚至在一些机载处理项目中取代了更传统的方法。然而,当前的采集配置阻止了三维srme的应用。
31.4.基于震源和基于接收器的鬼波压制
32.勘探(陆地或海洋勘测)采集期间的震源和接收器的鬼波效应是确定性空间反褶积(参见amundsen,l.,l.t.ikelle,and l.e.berg,2001,multi-dimensional signature deconvolution and free-surface multiple elimination of marine multicomponent ocean-bottom seismic data,geophysics,vol.66,pp.1594
–
1604)通常会导致频谱中的角度相关凹口和低频的严重衰减。
33.在标准地震采集的情况下,鬼波压制是一个具有挑战性的预处理步骤,这就是它通常被排除的原因。然而,现在人们对接收器端的鬼波压制重新产生了兴趣,因为它去除了地震小波的大旁瓣,并因此主要通过对直接偏移和镜像偏移结果执行双反卷积步骤来显著提高图像分辨率。还引入了其他鬼波压制方法,其中包括:(a)基于使用一维射线追踪近似来生成镜像数据的自举方法(参见wang,p.,and c.peng,2012,premigration deghosting for marine towed streamer data using a bootstrap approach;82nd annual international meeting,seg,expanded abstracts,vol.31,pp.1
–
5);(b)通过将压力鬼波小波的稀疏去卷积结果与相应的粒子运动鬼波小波进行卷积,然后执行基于将压力数据与粒子速度数据相结合的传统鬼波抑制技术,从而从海洋压力数据中估计垂直粒子运动分量(参见ferber,r.,p.caprioli,and l.west,2013,l1 pseudo-vz estimation and deghosting of single-component marine towed streamer data,geophysics,vol.78,no.2,pp.wa21
–
wa26);(c)利用向上波比向下的鬼波更早到达的事实,导致相关的鬼波抑制过滤器将鬼波事件移出时间窗口(参见beasley,cj,r.coates,y.ji,and j.perdomo,2013,wave equation receiver deghosting:a provocative example:83rd annual international meeting,seg,expanded abstracts,32,4226-4230;ferber,r.,and c.j.beasley,2014,simulating ultra-deep-tow marine seismic data for receiver deghosting,76
th annual international conference and exhibition,eage,extended abstracts;以及robertsson,j.o.a.,l.amundsen,and o.pedersen,2014,deghosting of arbitrarily depth-varying marine hydrophone streamer data by time-space domain modelling,84th annual international meeting,seg,expanded abstracts,pp.4248
–
4252)。
34.鬼波压制对鬼波模型中的错误很敏感,这是由勘探模型、接收器位置、地表和地下反射中的一系列不确定性造成的。在勘探过程中的大多数情况下,陆地或海面可能是密集的或粗糙的,这会使海面反射系数非常依赖于频率,因此无法精确地可知。使用鬼波模型时的其他不确定性属于在采集期间测量的接收器深度、温度和地下成分,它们在接收器和地表之间随时间和空间变化。
35.因此,这些会影响速度数据道集,从而影响波的传播,导致鬼波压制数据中的振铃效应。在接收器端,rickett等人于2014年开发了一种自适应鬼波压制算法,其考虑了这些参数的小偏差。
36.5.5d正则化和插值
37.石油和天然气公司需要密集的3d地震几何数据来增强地下图像,特别是在复杂的地下结构和复杂地层的情况下。然而,在1990年代,大多数采集都不密集,导致不规则间隔的采样数据被转换为规则的采样数据,以避免地震数据处理问题。5d正则化和插值(内联、交叉线、偏移距类别x、偏移距类别y和频率域)有助于确定用于预处理和速度分析的参数。
38.值得注意的是,插值有两个重要的作用。首先,它允许根据孔的范围来完全地或部分地填充孔。缺口通常与采集布局或问题有关。其次,它允许本领域普通技术人员增加空间采样密度,这对失真和叠加褶皱具有有益的影响。
39.另一方面,正则化将地震数据放置在规则网格上,这有助于合并多个勘探,并且对于后续的偏移可能是有益的,甚至是至关重要的。
40.通常使用傅立叶理论并通过实施将频率定位在不规则网格上的估计方法来对数据进行正则化(参见xu,s.,zhang,y.,pham,d.,2005,anti-leakage fourier transform for seismic data regularization.regularization,vol.70,pp.v78
–
v95)。在傅里叶系数估计之后,可以在任何网格上重建数据。由于傅立叶正则化旨在填补地震数据中的缺口,因此其密度增加使其足以构建公共偏移向量(cov)。几何形状的字节大小由定义交叉扩展的线上的接收器和炮点的间距决定(参见poole,g.,trad,d.,wombell,r.,williams,g.,2009,regularisation for wide azimuth datasets,ineage workshop on marine seismic-focus on middle east and north africa)。在炮点和接收器中正则化的数据提高了信噪比、相干性和反射事件的对齐(参见s.chopra,k.j.marfurt,(2013),preconditioning seismic data with 5d interpolation for computing geometric attributes leading edge,vol.32,pp.1456-1460)。
41.正则化和插值可以应用于许多不同的领域;例如,如果缺少接收器,则对炮点道集应用数据插值,反之亦然(vermeer,g.j.,2002,3-d seismic survey design,society of exploration geophysicists)。在复杂地质中,5d正则化和插值技术提供了显著的改进,允许在规则网格上对地震数据输入进行密集采样,而不会在il、xl和cov等方向上产生空间混叠(xu,s.,zhang,y.,lambar
é
,g.,2010,antileakage fourier transform for seismic data regularization in higher dimensions,geophysics,vol.75(6))。
42.因此,将5d正则化和插值应用于地震成像有助于减少偏移微笑,其由几何布局不佳而导致,并可能导致地震数据出现缺口。此过程对于浅层结构、复杂地质的地下成像以及地滚波和导波的na也很有效。此外,它还增强了能量采样,并改进了用于速度分析的cmp道集和cvs。5d正则化和插值提供了平面结构中的高分辨率。
43.然而,5d正则化和插值是一个极其敏感的过程,因此,数据的域和排序会导致不同的结果。对于复杂的地质情况尤其如此,它可能会影响地质裂缝的幅度和性质。
44.6.结论
45.从上述背景中可以看出,本领域的大多数技术人员通常使用时域中的简单srme流,并加上一定的预处理(例如反信号和鬼波压制),这实际上是传统的(时域)srme方法,缓慢且不太准确。这种传统的srme方法将卷积点处的震源和接收器深度/鬼波效应视为预测阶段的二次误差,并没有采取适当的步骤来消除它。相反,传统的srme方法采用最小二乘匹配滤波器(见上文中verschuur的文献)或曲线波方法来补偿卷积点处的鬼波效应和震源小波效应。
46.verschuur(见上文)的在数据域中的常规地表相关多次波消除方法通常需要非常大量的计算资源,并且比包括层析成像和(逆时/基尔霍夫)偏移在内的后续地震处理昂贵得多。当本领域的技术人员在标准的富方位角/宽方位角海洋或陆地勘探中拥有数tb字节的密集数据时,经常会遇到这些缺点。事实上,传统的srme方法在预测阶段将卷积点处的震源和接收器深度/鬼波效应视为二次误差,并没有采取适当的程序来消除它。相反,在生产中的传统srme方法采用最小二乘匹配滤波器(见上文中verschuur的文献)或曲线波方法来补偿卷积点处的鬼波效应和震源小波效应。同样,这种传统的srme方法将数据3d采样问题视为一阶因素,并使用5d类型的正则化方法(或不太准确的炮点和电缆内插/外插)来减少多次波预测采样错误。对于当前生产的3d waz/faz srme方法,常见的预处理步骤包括震源信号处理、3d数据域震源端和接收端的鬼波压制,以及5d正则化,等等。
47.另一方面,基于压缩感测理论的波束方法可以将密集的数据分解为稀疏的地震元素,然后将它们保存起来用于将来的地震处理。稀疏波束元素由包括位置、倾角和小波的最重要的属性来描述,并且能够表示那些复杂/密集的叠前数据集,以用于后续层析成像和偏移。通过简化稀疏波束域中的地震处理,可以将耗时的地震处理大大减少到可接受的周转时间。
48.即使有这些明显的优势,也没有看到基于数据的波束处理在波束域中的应用,用于基于数据的、地表相关多次波或层间多次波的去除。
49.因此,考虑到本领域可用的每种单独技术的所有缺点,同时有时需要填补传统srme方法的缺点,需要采用这样的多次预测和消除方法,在其不需要关于地下地质的结构或材料的先验信息,并且不会影响数据中所存在的所有相关信息。事实上,由于这些缺点,本领域的技术实际上是提供结果的大致估计而不是实际结果,这几乎与试错试验一样,从而使项目更加昂贵和耗时。然而,随着嵌入于高性能计算系统中的计算机程序产品的更加普及和应用,可以避免这些缺点,并且可以成本和时间合算的方式来解决上述的大型科学和工程问题。因此,本发明改进了传统的基于数据的时域srme方法的速度和准确性问题。
技术实现要素:
50.通常,勘探和储层表征是在勘测区域上针对其土壤和流体势特性进行的。根据在勘测区域内发现的特性,可能会发现一个或多个碳氢化合物(即石油和天然气)储层。此后,可以在地表处从叠前地震数据中获取目标碳酸氢盐的准确位置和幅度。尽管如此,在存在多次波的情况下,这成为一项具有挑战性的任务,因为所引入的误差和伪影将严重损害偏
移、反射断层扫描和速度估计过程。因此,本发明通过提供一种新颖的和改进的计算机程序产品而克服了现有技术的现有缺点,其能够防止鬼波之间或初波之间的串扰,同时生成更准确的多次波预测,从而使减法过程更容易和更快,且计算量更少。
51.本发明在cpu和gpu硬件上实现,用于规则或不规则波束形成,但不是逐个跟踪,后者是一种缓慢且计算密集的操作,因为它需要将多个表保存到本地/全局存储器资源中,本发明使用波束域srme和一种新颖的鬼波压制算子,其消除了计算系统i/o的瓶颈,并充分利用了集群cpu和gpu的计算能力,从而使srme操作与深度基尔霍夫/rtm模块相比更快和更高效。
52.在本发明的一个实施例中,预处理步骤包括震源信号处理或去卷积3d数据域震源和接收器端的鬼波压制,以及5d正则化。此外,本发明不要求数据域鬼波压制和信号处理作为5d正则化或5d内插步骤(例如,震源和电缆内插/外插、近/零偏移距内插/外插)的关键步骤,因此可以忽略。尽管如此,本发明的实施例还可以通过计算机程序产品来执行去卷积成像调节以及偏移域鬼波压制,以降低快速跟踪产品的鬼波/震源小波效应。因此,添加到本发明的波束域srme操作指令中的附加波束域鬼波压制算子在某些2d/3d合成和实时生产数据集上证明了其优越性。
53.例如,本发明的实施例已应用于sigsbee 2.5d模型(3d)、srme到pluto 2d弹性模型(2d)、bp2004 2d模型(2d)、seam 2d模型(2d)、sigsbee 2d模型(2d)、数据集具有:(i)41条帆线;(ii)每条帆线178个炮点;(iii)每个炮点178根电缆;(iv)每根电缆1068个通道;(v)线上450英尺的炮间距;(vi)75英尺的接收器间隔;(vii)震源和接收器位于相对于地表50英尺深的位置;(viii)30hz的最大频率;(ix)网格间隔为75*75*25英尺;以及(x)孔径为24km*24km,最大模型深度为9.1km。应用这些实施例的结果是成功地预测了初波和地表相关多次波,同时产生了偏移图像和道集,这表明地表相关多次波已被有效去除。
54.然而,在下文中将参考下面列出的附图描述本发明的进一步细节、示例和方面。
附图说明
55.通过结合附图并考虑以下描述,可以容易地理解本发明的教导。
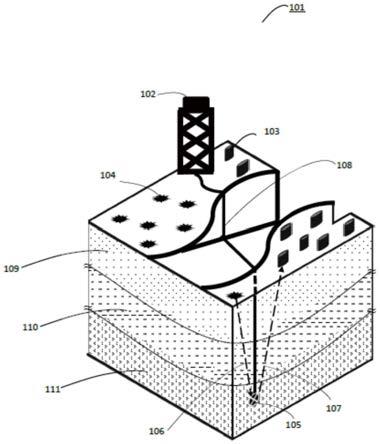
56.图1是示出了根据本发明的一个实施例的具有井位置、震源位置、接收器位置和元素的勘测区域的截面图的示意图;
57.图2示出了根据本发明的一个实施例的在体现于非暂时性计算机可读设备中的计算机程序产品中使用的方法和指令的流程图,该计算机程序产品存储了指令,用于由设备来执行采用波束域鬼波压制算子以在波束域中预测和消除地表相关多次波的方法;
58.图3示出了根据本发明的一个实施例的执行计算机程序产品以对所检索到的共图像道集进行预处理的子例程的流程图;
59.图4示出了根据本发明的一个实施例的执行计算机程序产品以用于分解所检索到的共图像道集的子例程的流程图;
60.图5示出了根据本发明的一个实施例的当计算机程序产品执行方法时在2d模型域中的勘测区域的图示,在该方法中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波;和
61.图6是计算机程序产品的方框形式的电气图,其存储了用于由设备来实现方法的
指令,在该方法中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波。
具体实施方式
62.现在将详细参考本发明的几个实施例,其示例在附图中示出。应注意的是,在适用之处,在附图中使用相同或类似的附图标记来指示相同或类似的功能。附图仅出于说明的目的描绘了本发明的实施例。本领域的技术人员将从以下描述中容易地认识到,在不脱离本文描述的原理的情况下,可以采用其中示出的结构、系统和方法的替代实施例。
63.被视为本发明的主题在说明书的结论部分被特别指出和明确要求保护。然而,通过结合附图并参考以下的详细描述,可以最好地理解本发明的组织和操作方法,连同其目的、特征和优点。
64.由于本发明的图示实施例大部分可以使用本领域的技术人员已知的电子元件和电路来实现,因此为了理解本发明的基本概念且不混淆或弱化本发明的教导,细节之处将不以比如上所示认为必要的更大的程度来解释。
65.说明书中对方法的任何引用都应比照适用于能够执行该方法的系统,并且应比照适用于存储指令的计算机程序产品,该指令一旦由系统执行就会导致该方法的执行。
66.另外,附图中的流程图和框图示出了根据本发明的各种实施例的系统、方法和计算机程序产品的可能实现的架构、功能和操作。还应注意,在一些替代实施方式中,方框中指出的功能可以不按图中指出的顺序发生。例如,取决于所涉及的功能,实际上可以基本上同时执行连续示出的两个方框,或者有时可以相反的顺序执行这些方框。还应注意,框图和/或流程图中的每个方框以及框图和/或流程图中的方框的组合可以由执行指定的硬件功能或动作的基于专用硬件的系统或者专用硬件和计算机指令的组合来实现。
67.说明书中对计算机程序产品的任何引用都应比照适用于能够执行存储在计算机程序产品中的指令的系统,并且应比照适用于可由读取存储在非暂时性计算机可读介质中的指令的系统来执行的方法。
68.如本文所使用的置于第一实体和第二实体之间的“和/或”是指(1)第一实体、(2)第二实体以及(3)第一实体和第二实体中的一个。用“和/或”列出的多个元素应以相同的方式解释,即,如此连接的元素中的“一个或多个”。
69.可以提供一种用于耗散存储在对象区域中的电荷的系统、计算机程序产品和方法。对象的区域可以是对象的任何部分。该区域可以具有任何形状和/或任何尺寸。
70.对象可以是系统的一部分。或者,物体可以是基材或可由系统检查、由系统审核和/或由系统测量的任何其他物品。
71.如前所述,勘探地震学旨在根据在地表处采集的叠前地震数据来揭示地下的目标碳酸氢盐的准确位置和幅度。在存在多次波的情况下,这成为一项具有挑战性的任务,因为所引入的错误和伪影将严重损害偏移、反射断层扫描和速度估计过程。迄今为止,传统或更先进的srme方法已将具有3d采样问题的数据作为一阶因素处理,并使用5d类型正则化方法(或不太准确的炮点和电缆内插/外插)以减少多次波预测采样错误。即使具有每种现有srme方法的明显优势,在本领域中也很少或没有提到基于数据的波束处理在波束域中的应用,用于基于数据的、地表相关多次波或层间多次波的去除。
72.因此,本发明的实施例基于压缩传感理论,其中波束法可以将密集的数据分解为
稀疏的地震元素,然后将它们保存以用于将来的地震处理。稀疏波束元素由包括位置、倾角和小波的最重要的属性来描述,并且能够表示那些复杂/密集的叠前数据集,以用于后续层析成像和偏移。本发明的实施例简化了稀疏波束域中的地震处理,这又将耗时且计算量大的地震处理减少到可接受的周转时间。此外,本发明的实施例将额外的波束域鬼波压制算子引入波束域srme流,从而证明其优于2d/3d合成和真实数据集。
73.来看图1,它代表陆地区域上的典型勘测区域101,示出了能够就用本发明的实施例的不同类型的地层109、110、111。本领域的普通技术人员将认识到,地震勘测区域会产生局部地质的详细图像,以便确定可能的碳氢化合物(石油和天然气)储层的位置和大小,从而确定井位105。然而,如在图1中观察到的那样,当在定向钻井期间使用mwd井下系统108时,为了到达井或储层105,mwd井下系统108必须从垂直向下的轨迹偏离到保持在规定的方位角和倾角范围内的轨迹,以便到达井或储层105。这种偏差的程度是由多种情况造成的,但最有可能是由于人口稠密或交通阻塞的地区。
74.在这些勘测区域101中,声波在爆炸期间在各个入射点、震源或炮点104处从地下岩层反弹,反射回地表的波被地震数据记录或接收传感器103所捕获,由数据传输系统602从所述传感器103无线式传输,然后存储用于后续处理,并通过计算机程序产品来分析,该计算机程序产品体现在存储有用于由设备来执行方法的指令的非暂时性计算机可读设备中,在该方法中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波。
75.特别地,本领域的普通技术人员很快将意识到,本示例示出了共中点道集,其中地震数据道按表面几何形状分类,以近似地球中的单个反射点。在这个例子中,来自几个炮点和接收器的数据可以组合成一个的图像道集,或单独地使用,这取决于要执行的分析类型。尽管本示例可以说明平面反射器和相应的图像道集的类别,但是也可以使用本领域中已知的其他类型或类别的图像道集,并且其选择可以取决于各种地球条件或事件的存在。在图1中,反射由多个地震数据记录传感器103捕获,其中每个地震数据记录传感器103都放置在相对于彼此和相对于井105的不同位置的偏移距处。因为所有入射点或炮点104以及所有地震数据记录传感器103都位于不同的偏移距处,因此勘探地震数据或道(在本领域中也称为道集)将在各种入射角下记录,入射角表示到储层105的反射(向下传输射线)106和来自储层105的反射(向上传输反射)107。在该示例中,井位105示为具有附接到井眼102的现有钻井,沿着该井眼使用本领域已知的技术获得多次测量。该井眼102用于获得测井数据,其中包括p波速度、s波速度、密度等。在勘测区域内还布置了其他未在图1中示出的传感器,以便还捕获解释者和本领域的普通技术人员进行各种地球物理分析所需的层位数据信息。在本示例中,将从现场记录中对道集进行分类,以检查振幅、信噪比、时差、频率成分、相位和其他地震属性对入射角、偏移距测量值、方位角以及对于数据处理和成像很重要且本领域普通技术人员已知的其他几何属性的依赖性。
76.这里使用的接收系统或传感器通常至少包括能够执行机器可读指令的硬件,以及用于执行能产生期望结果的动作(通常是机器可读指令)的软件。此外,检索系统可以包括硬件和软件以及计算机子系统的混合体。
77.来看图2,附图标记201表示在体现于非暂时性计算机可读设备中的计算机程序产品中使用的方法和指令的流程图,该计算机程序产品存储了指令,用于由设备来执行采用波束域鬼波压制算子以在波束域中预测和消除地表相关多次波的方法。这一方法和指令
201(其在体现于非暂时性计算机可读设备中的计算机程序产品中使用,该计算机程序产品存储了指令,用于由设备来执行采用波束域鬼波压制算子以在波束域中预测和消除地表相关多次波的方法)始于在步骤202处从勘测区域101中检索某些信息。特别地,该方法始于体现于计算系统设备中的计算机程序产品601的非暂时性计算机可读设备605接收到来自遥测系统602的消息钩子,表明它已经在步骤202处开始从位于所定义的勘测区域101上的多个接收器传感器103处检索数据,包含来自勘测区域的一组图像道集203。然而,本领域的普通技术人员很快就会意识到,还可以通过多种其他方式获取所检索到的数据203,例如来自已经包含所述数据的外部数据库、来自各种地震表面或地下地震断层扫描勘查,以及来自体现在计算系统设备中的计算机程序产品601的存储器资源603。
78.一旦已检索到所述一组图像道集203,非暂时性计算机可读设备605将向体现于计算系统设备中的计算机程序产品601的存储器资源603发送消息,以在步骤204处开始执行多线程的两部分子例程,如图3和4所示。特别地,附图标记301表示子例程如何执行计算机程序产品以对检索到的共图像道集进行预处理。这由非暂时性计算机可读设备605启动,其对图像道集执行分类命令302,使图像道集为共炮点/接收器道集,并通过最小二乘匹配或曲波匹配方法而适应于输入多次波。在成功地执行分类命令后,非暂时性计算机可读设备605将开始去卷积的步骤303,以便在数据域或图像域中从原始输入数据203中去除嵌入的小波。重要的是应注意,即使输入数据203没有通过震源信号处理来进行预处理,或者没有通过在3d数据域中的震源端和接收端去除鬼波来进行预处理,时/波束域中的简单或传统的srme流仍然可以使用最小二乘匹配滤波或曲波方法来补偿卷积点处的鬼波效应以及震源小波效应。然而,当与本发明由于执行步骤204而未观察到的3d场数据采样问题进行比较时,这些影响将产生二阶误差。
79.在非暂时性计算机可读设备605执行去卷积之后,它将开始在两端(震源和接收器)的常规鬼波压制的步骤304,以防止鬼波之间或初波之间的串扰,同时通过将初波与鬼波卷积来预测多次波。之后,非暂时性计算机可读设备605将使用傅立叶理论和估计方法的组合进行正则化,以在勘测区域101的不规则网格上定位频率,从而获得震源和接收器位置的恒定网格。随后,对缺失的近偏移距和缺失的中间偏移距进行插值。
80.根据计算系统设备601的计算程序的使用,非暂时性计算机可读设备605将确定在典型资源(cpu、gpu和内存)利用率低于70%的情况下步骤204中的子例程是并行还是按顺序执行。因此,非暂时性计算机可读设备605将在步骤401处开始执行计算机程序产品,用于分解具有多个共波束中心的所检索到的共图像道集。该步骤始于步骤402处的图像道集203的面向结构的滤波,以消除任何不需要的叠前地震现象,同时保留道集203的振幅。所述滤波402不仅沿着偏移距执行,而且沿着在勘测区域101中发现的构造倾角、方位角、线内和交叉线方向执行。此后,非暂时性计算机可读设备605在步骤403处将经滤波的图像道集剪辑到图像的确切值,以允许所检索的图像道集203更加精确,并且提高与其他应用程序的兼容性。一旦图像道集203已被剪辑,非暂时性计算机可读设备605将在步骤404处开始对所剪辑的道集进行小波成形,从而在步骤405处形成波束。在步骤404处发生的小波成形是时域和频域上的局部变换,其有利于本发明的方法,这是因为它用于从无法用傅立叶或甚至加窗傅立叶变换解开的信号中提取信息。此外,波束形成步骤405将采用多到达基尔霍夫波束迁
移的形式,以便使图像更清晰以进行后处理。一旦形成波束,非暂时性计算机可读设备605将确定其形式为规则或不规则波束的组成。如果波束规则地形成,则非暂时性计算机可读设备605将执行快速傅立叶变换(fft),并计算逆fft。另一方面,如果形成的波束是不规则的,则非暂时性计算机可读设备605将执行以下算法:
[0081][0082]
在步骤405处成功形成波束后,非暂时性计算机可读设备605将在步骤406开始计算相似度,以便进一步细化土地采集输入数据。使用这种技术可以大大提高数据分辨率,尽管存在背景噪音。此外,本领域技术人员将很快认识到,在尝试推断区域的地下结构时,在计算相似度的步骤406之后接收的新数据将更容易被解释。在计算机程序产品的用户选择通过键盘609或鼠标610来使用计算机系统设备606时,非暂时性程序计算机可读存储设备605也可以使用加权相似度。这将有助于提高传统相似度的分辨率,从而使传统相似度分析能够提供更复杂的地震数据。在本实施例中,相似度的计算采用以下算法:
[0083][0084]
一旦在步骤406处计算了相似度,非暂时性程序计算机可读存储器存储设备603就向计算机系统设备606发出信号,以在监视器608上显示炮点和接收器事件,以及每个小波。操作计算机系统设备606的本领域的普通技术人员通过观察监视器608很快就会意识到,针对每个相似度而言哪些事件和小波是相关的,并通过使用计算机系统设备606的键盘609和鼠标609的组合而选择它们。在选择时,操作计算机系统设备606的普通技术人员将在监视器608中看到图形用户界面,要求确认选择。如果选择被确认,则计算机系统设备606经由通信总线604向非暂时性程序计算机可读设备603发送消息,以在步骤407处存储稀疏地震元素,其通常将包括针对每个相似度的所选择的事件和小波。如果选择未被确认,则非暂时性程序计算机可读设备605再次通过计算机系统606的监视器608来呈现事件和小波,以供选择。一旦选定的事件和小波在步骤407处被存储,则系统退出子例程,完成计算机程序产品204(用于预处理和分解具有多个共波束中心的所检索到的共图像道集)的执行。
[0085]
存储器资源603将通过通信总线604发送信号,用于非暂时性计算机可读设备605在步骤205处开始在它们各自的震源和接收器位置处设置或固定经预处理的和分解后的图像道集。非暂时性计算机可读设备605将在步骤206处循环或重复设置的过程,直到所有的图像道集已经在它们的具有共波束中心的震源和接收器处进行了设置为止。尽管如此,在进入下一步骤之前,非暂时性计算机可读设备605将通过显示监视器608向操作计算机系统设备606的本领域的技术人员提供图形用户界面,以确定非暂时性计算机可读设备605是否已圆满完成步骤206。在确认后,计算机系统设备606通过通信总线604向非暂时性程序计算机可读设备603发送消息,以在步骤207处开始分别针对共炮点/接收器数据在接收器端/炮点端进行鬼波压制。
[0086]
在步骤207,非暂时性计算机可读设备605将验证在步骤204执行的所有子例程都已成功执行,并在步骤208处开始向步骤207处的双端(接收器和震源)的鬼波压制应用鬼波
压制算子。特别是,在步骤207处用于震源端的针对经分解的共炮点tau-p数据(震源端鬼波已在预处理步骤204中移除)所发生的波束域鬼波压制将根据以下算法进行:
[0087][0088]
其中,ps和pg分别为波束的初始震源和接收器射线的慢度矢量;zs和zg分别为震源和接收器深度;而υ是水柱的速度。是用于共炮点xs的鬼波补偿的初波tau-p数据,从而式(3)导致鬼波旁瓣塌陷,同时保留小波的原始相位。另一方面,用于接收器端的针对经分解的共炮点tau-p数据的波束域鬼波压制将根据以下算法方程来实现,其去除接收器鬼波,并保留运动学参数,留下实际到达时间处的初始事件:
[0089][0090]
因此,由非暂时性计算机可读设备605在步骤207处执行的这些波束域鬼波压制算法比传统数据域的3d鬼波压制更准确,因为它们不作为反演执行,并且计算强度更低且速度更快。这些算法(3)和(4)考虑了远离自由海面的卷积点处的震源和接收器深度/鬼波效应,因此可以防止鬼波之间的串扰或初波之间的串扰,同时通过将波束初波与波束鬼波进行卷积来预测多次波。在执行算法(3)和(4)之后,分解后的共炮点tau-p数据然后在步骤209处由非暂时性计算机可读设备605分成波束初波和波束鬼波
[0091]
随着波束被分成初波和鬼波,非暂时性计算机可读设备605开始分别在步骤210和211处执行波束鬼波与波束初波的卷积以及相加的步骤。一旦非暂时性计算机可读设备605将波束鬼波和波束初波相加在一起,它就在步骤212处使用算法(5)和算法(6)生成预测的地表相关/层间多次波,这两个算法分别用于共炮点和接收器数据:
[0092][0093][0094]
在上述算法中,m(s,g
′
,t)是一个预测的多次波轨迹,其中震源在s,接收器在g',或者,m(g,s
′
,t)是在震源s'和接收器g处的预测的多次波。然后,将预测的多次波轨迹m(s,g
′
,t)或m(g,s
′
,t)分类为共炮点/接收器道集,并通过最小二乘匹配或曲波匹配方法适应
输入多次波,最后在数据域或图像域中将其从原始输入数据中去除。注意,对于算法(5),如果在3d数据域鬼波压制预处理中没有去除震源端鬼波,那么波束域震源端鬼波压制也可以在共接收器波束偏移阶段针对可以归入共接收器域的预测原始数据来进行。尽管如此,算法(5)和(6)中的这些预测多次波考虑了远离自由海面的卷积点处的震源和接收器深度/鬼波效应,因此它可以防止鬼波之间或初波之间的串扰,同时通过将初波与鬼波进行卷积来预测多次波。
[0095]
此后,在非暂时性计算机可读设备605已经产生了地表相关/层间多次波之后,它在步骤213处使用最小二乘减法或曲波减法来在数据域或图像域中减去地表相关/层间多次波。这将触发非暂时性计算机可读设备605用信号通知存储器资源603,开始存储在波束域中使用波束域鬼波压制算子所添加和消除的地表相关/层间多次波。此外,非暂时性计算机可读设备605将用信号通知计算机系统设备606,以在监视器608上向体现于计算系统设备601中的计算机程序产品的使用者显示消息,以决定是否还将所述在波束域中使用波束域鬼波压制算子产生的所添加和消除的地表相关/层间多次波存储到不同的存储器资源中,例如外部存储设备上,或者将结果通过打印设备611打印出来,或执行这两者。
[0096]
图5显示了作为执行了用于执行图2所示方法201的一系列操作和指令的结果的勘测区域101,在该方法中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波。特别是,为了达到上述效果,图5分别显示了初波波束502和鬼波波束505。为了将它们分类并产生本领域的技术人员可以在本领域中使用的有用结果,本发明的实施例使用图2所示方法201的算法来进行处理。
[0097]
如附图标记502所示,初波波束由震源入射点或炮点s(附图标记104)和接收器g(附图标记103)处的输入共炮点数据表示,其已进行了预处理,通过用数据域3d鬼波压制算法进行震源端鬼波压制。在附图标记502处,震源s 104产生向下的波束106,其在储层105上反射,而接收器g捕获其向上的反射107。然后,这些在共炮点域根据下式分解为tau-p域稀疏波束:
[0098][0099]
其再根据下式进行堆叠:
[0100][0101]
这里,函数是来自共炮点数据的经分解的tau-p数据(在预处理中已经去除了震源端鬼波),l是共炮点波束中心l(l
x
,ly),pg是接收器点r
′
(g
x
,gy)处的慢度向量r'是轨迹位置r
′
(g
x
,gy),r是图像点r(x,y,z);是共炮点xs处记录的波场;u
x
(r;l,p;ω)是迁移算子,可扩展为:
[0102][0103]
这里,和分别是震源波束和接收器波束,然后它们可以被接收器端波束域鬼波压制算子506分成鬼波波束505。计算机程序产品201然后执行
方法(其中采用波束域鬼波压制算子在波束域中预测和消除地表相关多次波)的卷积指令;其中,在相同的卷积接收器点g 103处将顶部鬼波波束(震源s 104和接收器g 103)与底部初波波束(震源s'507和接收器g 104)进行卷积,这将生成一个预测多次波,波束路径为s到g和g到s',从而形成鬼波*初波,其中,g 103实际上成为波束中心l。此后,计算机程序产品201将执行方法(其中采用波束域鬼波压制算子在波束域中预测和消除地表相关多次波)的求和指令;将顶部预测波束(具有波束路径s到g到s',形式为鬼波*初波)以及从s到g到s'的另一个预测波束路径(如波束106、107、506和508所示)相加,从而形成初波*鬼波。然后,计算机程序产品201将卷积接收器点g/l与慢度p相加,以生成一个针对震源s和接收器s'的预测地表相关多次波轨迹m(s,s')。
[0104]
图6示出了体现在计算系统设备中的计算机程序产品601,其包括遥测系统602、用于存储数据的存储器资源603、通信总线604、非暂时性程序计算机可读设备605,以及计算机系统设备606。体现在计算系统设备中的计算机程序产品601由可用于由设备来执行图2所示方法201(其中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波)的一系列操作和指示的功能性框图示出。
[0105]
存储器资源603可以包括各种形式的存储器介质和存储器存取设备中的任何一种。例如,存储器资源603可以包括半导体ram和rom器件,以及诸如cd-rom驱动器、磁盘驱动器和磁带驱动器的大容量存储设备。
[0106]
计算机系统设备606充当非暂时性程序计算机可读设备605的用户界面,以输入、设置、选择并执行获取、存储、划分、运算、生成、检索、叠加、调整大小、定位、索引、建模、计算和重复的操作(统称为消息钩子程序)。所述计算机系统设备606(有线和/或无线地)通过通信总线604连接到遥测系统602、存储器资源603和非暂时性程序计算机可读设备605。计算机系统设备606还包括其他设备,例如中央处理单元(cpu)607,显示器或监视器608,键盘609,鼠标610和打印机611。一个或多个用户可以通过计算机系统设备606的一组输入设备(如键盘609或鼠标610)向体现在计算系统设备中的计算机程序产品601提供输入。然而,本领域的普通技术人员将很快意识到,输入设备还可包括诸如数字化平板、轨迹球、光笔、数据手套、眼睛方向传感器、头部方向传感器等的器件。显示器608和打印机611的集合还可以包括诸如投影仪、头戴式显示器、绘图仪等的设备。
[0107]
在体现在计算系统设备中的计算机程序产品601的一个实施例中,其可包括一个或多个通信总线(通信器材)604,例如用于与计算机网络接口的网络接口卡。例如,在远程站点收集的地震数据可以通过计算机网络使用遥测系统602传输到体现在计算系统设备中的计算机程序产品601。体现在计算系统设备中的计算机程序产品601可以使用通信总线604(如网络接口卡)从外部计算机网络接收地震数据、坐标、元素、震源和接收器信息。在其他一些实施例中,体现在计算系统设备中的计算机程序产品601可以包括通过计算机网络耦合的多个计算机和/或其他部件,其中,用于实现本发明的实施例的存储和/或计算可以根据需要分布在计算机(和/或部件)上。
[0108]
体现在计算系统设备中的计算机程序产品601具有提供用于多个连接的设备(例如遥测系统602、用于存储数据的存储资源603、通信总线604、非暂时性程序计算机可读设备605和计算机系统设备606)的连接和互操作性的固件和软件。体现在计算系统设备中的计算机程序产品601括操作系统、一组消息钩子程序,以及系统应用程序。
[0109]
此外,因为性能始终是重要的问题,所以体现在计算系统设备中的计算机程序产品601使用非暂时性程序计算机可读设备605来确保方法501的步骤不会受到计算系统601的输入/输出或任何网络通信的瓶颈制约。事实上,软件框架分布式文件系统和适当的数据压缩以及根据数据的智能文件缓存将确保如图2所示的方法201(其中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波)仅受限于内存/缓存速度和cpu/gpu计算能力,而不受其他任何限制。
[0110]
嵌入在体现在计算系统设备中的计算机程序产品601中的操作系统可以是microsoft公司的windows操作系统,ibm公司的os/2系统,unix系统,linux系统,sun microsystems或apple操作系统,以及无数种嵌入式应用程序操作系统,例如可从wind river公司获得。
[0111]
体现在计算系统设备中的计算机程序产品601的消息钩子程序例如可以表示存储资源603、计算机系统设备606和非暂时性程序计算机可读设备605的操作或命令,其可正在执行如图2所示的方法201(其中采用波束域鬼波压制算子来在波束域中预测和消除地表相关多次波)的某些步骤过程或子例程。
[0112]
所述一组消息钩子程序可以首先由以下输入来启动:(i)用户(通常是本领域的普通技术人员)的输入,例如输入用户定义的值或参数;(ii)计算机系统设备606的操作;(iii)非暂时性程序计算机可读设备605中的操作的处理;或者(iv)一旦某些数据已被存储资源603或非暂时性程序计算机可读设备605所存储或检索到便自动执行。基于这些输入、过程或操作事件中的任何一个,存储资源603、非暂时性程序计算机可读设备605或计算机系统设备606便生成数据包,该数据包使用通信总线604来传送,表示已发生的事件以及需要发生的事件。当存储资源603、非暂时性程序计算机可读设备605或计算机系统设备606接收到数据包时,它基于事件来将其转换为消息,并执行方法201的所需的操作和指令。当操作系统检查消息钩子列表并确定是否有任何消息钩子程序已在操作系统中注册了自己时,这就可以实现。如果至少一个消息钩子程序已在操作系统中注册了自己,则操作系统会将消息经由通信总线604传递给已注册的消息钩子程序,其会首先出现在列表中。被调用的消息钩子执行并向存储资源603、非暂时性程序计算机可读设备605或计算机系统设备606返回一个值,其指示它们将消息传递到下一个注册的消息钩子。体现在计算系统设备中的计算机程序产品601继续执行操作,直到所有注册的消息钩子都通过为止,这通过生成在数据域和图像域中最终形成的地表相关/层间多次波、从所执行的计算机程序产品中减去多次波并将其存储到存储器资源603中来表示方法201的完成。
[0113]
非暂时性计算机可读设备605配置为读取和执行程序指令,例如在诸如一个或多个cd-rom的存储介质的集合上提供的并在执行时加载到半导体存储器中的程序指令。非暂时性计算机可读设备605可以通过通信总线604(或通过总线的集合)有线或无线地耦合到存储资源603。响应于程序指令,非暂时性计算机可读设备605可以对存储在一个或多个存储资源603中的数据进行操作。非暂时性计算机可读设备605可以包括一个或多个可编程处理器(例如微处理器)。
[0114]“计算机或计算系统设备”包括导致产生的直接行为,以及促进产生的任何间接行为。间接行为包括向用户提供软件,维护使用户能够通过其影响显示的网站,超链接至此类网站,或与执行此类直接或间接行为的实体合作。因此,用户可以单独操作或与第三方供应
商合作,以便在显示设备上生成参考信号。显示设备可以作为输出设备包括在内,并且应适合于显示所需的信息,例如但不限于crt监视器、lcd监视器、等离子设备、平板设备或打印机。显示设备可以包括已经通过使用旨在用于评估、校正和/或改善显示结果的任何常规软件进行校准的设备(例如,已经使用监视器校准软件进行了调整的彩色监视器)。作为在显示设备上显示参考图像的附加或替代,根据本发明的方法可以包括向对象提供参考图像。
[0115]
软件包括存储在任何存储介质(例如ram或rom)中的任何机器代码,以及存储在其他设备(例如非暂时性计算机可读介质,例如外部硬盘驱动器或闪存)上的机器代码。软件可以包括源代码或目标代码,包含能够在客户端计算机、服务器计算机、远程桌面或终端中执行的任何指令集。
[0116]
软件和硬件的组合也可以用于为所公开的发明的某些实施例提供增强的功能和性能。一个示例是直接将软件功能制造到硅芯片中。因此,应当理解,硬件和软件的组合也包括在检索系统的定义内,因此本发明将其设想为可能的等效结构和等效方法。
[0117]
数据结构是可以实现本发明的实施例的限定的数据组织。例如,数据结构可以提供数据的组织,或可执行代码的组织。数据信号可以跨非暂时性传输介质承载,并且跨各种数据结构存储和传输,因此可以用于传输本发明的实施例。
[0118]
根据本发明的优选实施例,仅作为示例性实施例而详细描述了某些硬件和软件,它们并不限制所公开的实施例的实现结构。例如,尽管已经描述了许多内部和外部部件,但是本领域的普通技术人员将会理解,这样的部件及其互连是众所周知的。另外,所公开的发明的某些方面可以体现在使用一个或多个接收系统、计算系统设备或非暂时性计算机可读设备来执行的软件中。可以将技术的程序方面视为通常以某种类型的机器可读介质来承载或体现的可执行代码和/或关联数据的形式的“产品”或“制品”。有形的非暂时性“存储”类型的介质和设备包括用于计算机、进程等的任何或所有的内存或其他存储器,或其相关的模块,例如各种半导体存储器、磁带驱动器、磁盘驱动器、光盘或磁盘,以及可以随时为软件编程提供存储的部件。
[0119]
如本文所使用的术语“勘测区域”是指地质感兴趣的区域或体积,并且可以在任何测量尺度下与该区域或体积的几何形状、姿态和布置相关联。一个区域可能具有其中已发生的诸如折叠、断层、冷却、卸载和/或断裂的特征。
[0120]
如本文所使用的术语“执行”包括各种各样的动作,包括计算、确定、处理、推导、勘探、查找(例如,在表、数据库或另一数据结构中查找)、确信等。它还可以包括接收(例如接收信息)、访问(例如访问内存中的数据)等。而且,“执行”可以包括解析、选择、选定、构建等。
[0121]“获取一定的数据”可以包括通过物理、电话或电子传递的方式将参考数据创建或分发给对象,通过网络提供对参考数据的访问,或者向被配置为在对象工作站上运行的对象或包含参考图像的计算机创建或分发软件。在一个示例中,获取参考数据或信息可以涉及使对象能够经由打印机获得硬拷贝形式的参考数据或信息。例如,信息、软件和/或指令可以被传输(例如,通过数据存储器或硬拷贝以电子或物理方式)和/或以其他方式可用(例如,通过网络),以便于主体使用打印机来打印硬拷贝形式的参考图像。在这样的示例中,打印机可以是已经通过使用旨在用于评估、校正和/或改善打印结果的任何常规软件进行了校准的打印机(例如,已经使用颜色校正软件来调节的彩色打印机)。
[0122]
此外,模块、特征、属性、方法和其他方面可以被实现为软件、硬件、固件或其任何组合。在本发明的部件被实现为软件时,该部件都可以被实现为独立程序,作为较大程序的一部分,多个独立程序,静态或动态链接库,内核可加载模块,设备驱动程序,和/或计算机编程领域的技术人员现在或将来已知的所有其他方式。另外,本发明不限于在任何特定的操作系统或环境中的实现。
[0123]
尽管在前述说明书中已经针对本发明的某些优选实施例描述了本发明,并且出于说明的目的已经阐述了许多细节,但是本发明不应不当地限于已经出于说明性目的而阐述的前述内容。相反,在不背离如以下权利要求书所限定的本发明的真实范围的情况下,多种修改和替代实施例对于本领域技术人员将是显而易见的。另外应当理解,在本文的任何一个实施例中示出或描述的结构特征或方法步骤也可以在其他实施例中使用。
[0124]
符号列表
[0125]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1