时空轨迹多节点并行融合方法与流程
本发明涉及时空数据处理领域,特别涉及一种机动目标实时监视系统中的时空轨迹快速分布式融合方法,尤其涉及一种多节点并行融合方法。
背景技术:
1、随着移动互联网、位置感知技术、对地观测技术的快速发展,以移动对象、空间/时空、遥感为代表的空天传感数据呈爆发式增长,日趋庞大的数据量容易导致算法性能陷入瓶颈。空天大数据使用流程复杂、使用门槛高、应用效率低。空天数据(aerospace data)主要来自天基和空基,例如基于天基平台的gnss(全球导航卫星系统)数据等,空天大数据涵盖spatial(空,即地理空间)和space(天,即宇宙空间)的地海空天各类与位置相关数据。空天数据具有类型多样、高度非结构化、大单体、多维度等特征,给一体化数据管理和高效查询检索提出了极大挑战。在存储管理方面,以往集中式存储严重依赖单机性能,极大限制了存储能力的可扩展性,无法支撑海量非结构化数据低延迟存取高并发访问。在处理分析方面,以往串行分析算法已无法满足海量时空数据的实时处理需求,不能充分发挥当前新型硬件构架和并行模型/框架的优势。在具体研究应用中,传统数据处理和分析方法已无法满足时空大数据高效存取、实时处理的性能需求。因此,时空大数据与高性能计算/云计算融合是必然的发展趋势。
2、时空轨迹数由位置坐标和相应的时间标记合成,因此,时间特征对分析移动物体的运行模式非常关键。时空轨迹数据记录了持续移动对象在某时刻出现在相应位置上的一系列信息,是其运动状态下时空属性的表现。应用到实际情况中,可能存在两条轨迹段时间跨度相差较大的情况。空间距离和时间距离存在着不同数量级。子轨迹段形状具有不规则性,且集合中含有大量的噪声。由于根据相邻样本点变化角度来划分轨迹段结果质量低下。导致qmeasure值偏高,传统时空数据处理以地理信息系统(gis)或遥感图像处理平台软件为核心,强调平台专业性,但由于专业强化,形成专业度较高的半封闭系统,也会反向弱化和其他多模类型数据的融合处理能力。传统空天数据应用需要大量做切片预处理,导致数据应用不灵活。为了数据更灵活,业界引入了预先静态缓存+动态切片的算法,但这种算法很复杂。带有全球定位系统(gps)功能设备的增多,产生大量的时空轨迹数据,给数据的存储、传输和处理带来了沉重的负担。因此时空轨迹在目标较多时处理比较耗时,运行速度较慢。传统的单节点处理方式受处理器性能限制,不能及时处理大批量目标的融合计算,传统多节点并行处理方式主要是让计算分布式并行处理,提高算力,减低处理时间,但在机动目标实时监视系统中,比较耗时的是与所有目标的比较,且所有目标同步在实时更新,同时要保证所有的计算是同步进行,故需要耗费较多的同步时间。由于导致的分段点前后轨迹的相关性被破坏,以增强算力为目的的大数据等处理平台的分布式计算,很难用来提高融合处理速度。因此,急需研究一种多节点并行融合方法,用多节点同时处理,减少处理时间,提高融合效率。
技术实现思路
1、为了解决这种大批量机动目标快速融合问题,本发明提供一种可以减少处理时间,提高融合效率的时空轨迹多节点并行融合方法,以解决大批量目标融合速度慢的问题。
2、为了实现上述目的,本发明提出了一种时空轨迹多节点并行融合方法,其特征在于包括如下步骤:
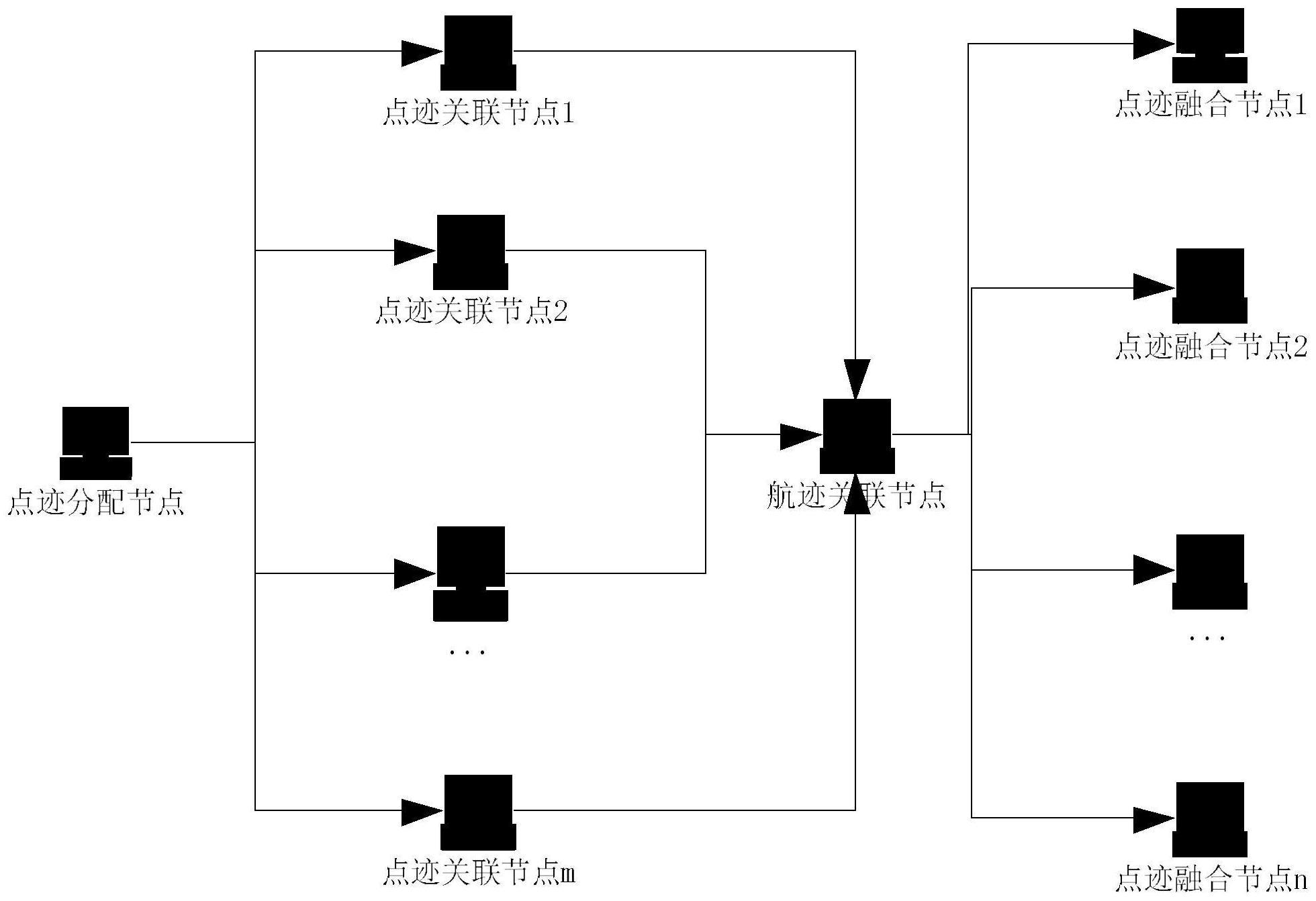
3、使用高分辨率数据搜索与移动窗口中的中心像素光谱相似的像素,对样本进行过滤和点迹分配节点,为每个相似的像素分配组合权值,通过回归分析确定转换系数;以数据变换模型为基础,对变换后的数据进行信息的筛选和加工,构建时空轨迹数据集、特征点集合以及子轨迹集合,根据权重函数确定权重,建立时空自适应融合模型;点迹分配节点根据点迹关联分配规则计算点迹的关联区域,并将点迹输出到点迹关联结点;点迹关联结点根据模糊双门限的点迹关联规则在点迹关联节点1、点迹关联节点2…点迹关联节点m进行点迹关联计算,根据相关性得到每帧的点迹关联结果并输出到航迹关联结点;航迹关联节点根据航迹关联规则进行航迹关联计算,根据当前点迹目标编号o1,关联成功的目标编号o2,关联隶属度f生成航迹关联结果,并根据融合分配规则将航迹关联结果输出到点迹融合结点;点迹融合结点根据点迹融合规则在点迹融合节点1、点迹融合节点2…点迹融合节点n进行点迹融合计算,生成最终的融合结果。
4、本发明与现有技术相比具有如下有益效果:
5、本发明使用使用高分辨率数据搜索与移动窗口中的中心像素光谱相似的像素,对样本进行过滤和点迹分配节点,为每个相似的像素分配组合权值,通过回归分析确定转换系数;以数据变换模型为基础,对变换后的数据进行信息的筛选和加工,构建时空轨迹数据集、特征点集合以及子轨迹集合,根据权重函数确定权重,建立时空自适应融合模型;这种以点迹关联按区域进行并行计算,点迹融合按编号并行计算,可以减少融合处理时间,提高融合效率,可以解决大批量目标实时融合效率低的问题。
6、本发明采用点迹分配节点,根据点迹关联分配规则计算点迹的关联区域,并将点迹输出到点迹关联结点;点迹关联结点根据模糊双门限的点迹关联规则在点迹关联节点1、点迹关联节点2…点迹关联节点m进行点迹关联计算,根据相关性得到每帧的点迹关联结果并输出到航迹关联结点;航迹关联节点根据航迹关联规则进行航迹关联计算,根据当前点迹目标编号o1,关联成功的目标编号o2,关联隶属度f生成航迹关联结果,并根据融合分配规则将航迹关联结果输出到点迹融合结点;点迹融合结点根据点迹融合规则在点迹融合节点1、点迹融合节点2…点迹融合节点n进行点迹融合计算,生成最终的融合结果。各个技术节点只需配置普通商用电脑即可,成本低融合效率高,可以在无大数据或云计算环境下提高融合效率。
技术特征:
1.一种时空轨迹多节点并行融合方法,其特征在于包括如下步骤:使用高分辨率数据搜索与移动窗口中的中心像素光谱相似的像素,对样本进行过滤和点迹分配节点,为每个相似的像素分配组合权值,通过回归分析确定转换系数;以数据变换模型为基础,对变换后的数据进行信息的筛选和加工,构建时空轨迹数据集、特征点集合以及子轨迹集合,根据权重函数确定权重,建立时空自适应融合模型;点迹分配节点根据点迹关联分配规则计算点迹的关联区域,并将点迹输出到点迹关联结点;点迹关联结点根据模糊双门限的点迹关联规则在点迹关联节点1、点迹关联节点2…点迹关联节点m进行点迹关联计算,根据相关性得到每帧的点迹关联结果并输出到航迹关联结点;航迹关联节点根据航迹关联规则进行航迹关联计算,根据当前点迹目标编号o1,关联成功的目标编号o2,关联隶属度f生成航迹关联结果,并根据融合分配规则将航迹关联结果输出到点迹融合结点;点迹融合结点根据点迹融合规则在点迹融合节点1、点迹融合节点2…点迹融合节点n进行点迹融合计算,生成最终的融合结果。
2.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:点迹分配节点根据点迹关联分配规则计算点迹的关联区域i:
3.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:点迹为目标的时空信息,包括原始目标编号o、位置时间t、wgs-84坐标经度l、纬度b,高度h,定位误差e,三维地心坐标x,y,z,其中,t的单位为秒,l的单位为度,b的单位为度,h的单位为米,e的单位为米,x,y,z的单位为米。
4.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:点迹关联结点的点迹关联计算流程为:点迹关联结点设置输入点迹关联门限u、时间门限v、点迹p:o,t,l,b,h,e,x,y,z,根据点迹目标编号,将点迹保存到原始链表,时空自适应融合模型遍历所有的原始链表,在原始链表中查找时间门限v内的最短距离r,时空自适应融合模型采用如下所示计算公式,计算点迹相关隶属度f:f=2.61728-0.115r/e,根据相关隶属度f判断是否关联成功,当f大于u时关联成功,输出关联结果,否则转入遍历其它原始目标进行点迹关联,其中,u=0.6、v=10为输入的经验常量,o为目标编号,t为位置时间,l为经度,b为纬度,h为高度,e为定位误差,x,y,z为目标的三维地心坐标。
5.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:点迹关联结点的在原始链表中查找时间门限v内的最短距离r中:在原始链表中找出所有与点p的位置时间差≤v的所有点p={p1,p2,…,pk},p1,p2,…,pk为p中的点迹,然后,根据三维地心坐标p1=(x1,y1,z1),p2=(x2,y2,z2),…,pk=(xk,yk,zk),计算点p与p中每个点的欧式距离r={r1,r2,…,rk},获取r为r中的最小值:r=min{r1,r2,…,rk},其中,min表示集合中的最小值,表示点p与p中第i个点的欧式距离:
6.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:航迹关联结点的航迹关联计算流程为:输入点迹关联结果,根据点迹关联目标编号将点迹关联结果保存到关联链表,相同的目标编号o1与o2的点迹关联结果f依次保存到相同的关联链表中,根据时间门限v内的所有点迹关联结果f={f1,f2,…,fk},计算航迹关联结果g:生成融合编号并分配融合节点,其中,f1,f2,…,fk为点迹关联结果。
7.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:航迹关联节点在生成融合编号并分配融合节点中:根据航迹相关隶属度g判断是否关联成功,若g大于u时关联成功,否则关联失败;若关联成功,则融合编号为关联上的目标编号o2,融合节点不变;若关联失败,则生成新的融合目标,融合编号为o1,则分配的融合节点为j=rem(p,n)+1,其中,p为当前融合目标个数,n为融合节点个数,rem表示取余,即rem(p,n)表示p除以n的余数。
8.如权利要求1所述的时空轨迹多节点并行融合方法,其特征在于:点迹融合节点查找时间门限v内的所有点迹:在与点迹p相同的融合目标编号的融合链表中,查找与点迹p的位置时间差≤v的所有点p={p1,p2,…,pk},找出满足要求的点迹;p1,p2,…,pk;识别出参与融合轨迹的公共信息,将融合后目标设为x,y,z三维地心坐标,利用生成的特征点集合形成该条轨迹的子轨迹段集合,对轨迹数据进行聚类,并对时间序列进行标准化预处理,根据所有轨迹的特征点集合生成全部轨迹的子轨迹段集合,提取轨迹特征点,将轨迹特征点添加到特征点集合中,采用如下所示的协方差凸组合计算公式计算融合结果:融合结果的定位误差e和融合结果三维地心坐标x,y,z:
9.按照轨迹的先后顺序重新组成轨迹序列,建立一个较大的环形关联门,如果被融合的轨迹的估计误差不相关,再跟其他的估计进行融合,并且扩大波门对丢失的目标再次捕获,去重并输出匹配合并后的轨迹序列,其中,xi,yi,zi点迹pi的三维地心坐标,点迹pi的定位误差的平方。
技术总结
本发明公开的一种时空轨迹多节点并行融合方法,可以减少处理时间,提高融合效率。本发明通过以下技术方案实现:首先,使用高分辨率数据搜索与移动窗口中的中心像素光谱相似的像素,对样本进行过滤和点迹分配节点,为每个相似的像素分配组合权值,通过回归分析确定转换系数;点迹分配节点根据点迹关联分配规则计算点迹的关联区域,将点迹输出到点迹关联节点;其次,点迹关联节点根据点迹关联规则进行点迹关联计算,输出点迹关联结果;然后,航迹关联节点根据航迹关联规则进行航迹关联计算,生成航迹关联结果,并根据融合分配规则将关联结果输出到点迹融合节点;最后,点迹融合节点根据融合规则将点迹进行融合,生成最终的融合结果。
技术研发人员:王前东,谢卫,路高勇
受保护的技术使用者:西南电子技术研究所(中国电子科技集团公司第十研究所)
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!