一种基于组合调制原理的拼接式绝对直线位移传感器
1.本发明属于精密直线位移传感器领域,具体涉及一种基于组合调制原理的拼接式绝对直线位移传感器。
背景技术:
2.长量程鉴定平台、大行程直线电机传送线等中的位移传感器量程可达数米乃至数十米,是装备制造检测和自动化控制领域的核心功能部件。这种大量程的位移测量目前主要采用的是钢带式光栅,其量程最大可达60m,多为增量式测量,增量式不可避免存在累计误差。绝对式光栅采用不同间距的栅线表示绝对位置数据,并以某种特定的编码形式直接刻划到栅尺上,意味着在整个量程范围内,需要排布无重复样式的编码,导致量程越长的绝对式编码和解码的复杂程度也成倍的增加。由于研究门槛的限制,导致国内暂无法制造类似大量程绝对式光栅位移传感器。
3.近年来国内研制出了一种以时钟脉冲作为位移测量基准的时栅直线位移传感器,并在此基础上研制了基于交变电场的差极型绝对式时栅直线位移传感器(公开号为cn208140019u),实现了单段直线式纳米时栅传感器的绝对式测量。但是,目前该类型传感器受限于传统的栅尺加工工艺,只能实现单段最大2000mm的传感器基体制造,且激励信号从传感器的定尺基体上的激励电极接入,感应信号从动尺基体上的感应电极输出,有些场合无法使用,且信号输出线的安装较为麻烦,从而导致传感器可靠性降低。
技术实现要素:
4.本发明的目的是提供一种基于组合调制原理的拼接式绝对直线位移传感器,以实现测量范围达到几米甚至几十米的超大量程绝对直线位移测量。
5.本发明所述的基于组合调制原理的拼接式绝对直线位移传感器,包括定尺和动尺,动尺的基体下表面与定尺的基体上表面正对平行安装,并留有间隙;定尺的基体上表面设有激励电极,激励电极由4m1个大小相同、极距为w1的矩形极片ⅰ沿x轴正方向等间距排列组成,每相邻的四个矩形极片ⅰ形成一个对极,激励电极具有a、b、c、d激励组;设定x轴正方向为测量方向,动尺的运动方向为x轴方向,平行于定尺的基体表面且垂直于x轴的方向为y轴方向,垂直于定尺的基体表面的方向为z轴方向。
6.在定尺的基体上表面,激励电极的一侧间隔设有解调电极ⅰ、另一侧间隔设有解调电极ⅱ。解调电极ⅰ由第一解调电极和第二解调电极并排组成,第一解调电极、第二解调电极都由2m2个大小相同、极距为w2的解调极片ⅰ沿x轴正方向等间距排列组成;第一解调电极中的第2n2+1个解调极片ⅰ连接组成a1解调组、第2n2+2个解调极片ⅰ连接组成b1解调组,第二解调电极中的第2n2+1个解调极片ⅰ连接组成a2解调组、第2n2+2个解调极片ⅰ连接组成b2解调组,n2依次取0至m
2-1的所有整数。解调电极ⅱ由第三解调电极和第四解调电极并排组成,第三解调电极、第四解调电极都由2m3个大小相同、极距为w3的解调极片ⅱ沿x轴正方向等间距排列组成;第三解调电极中的第2n3+1个解调极片ⅱ连接组成a3解调组、第2n3+2个解调极
片ⅱ连接组成b3解调组,第四解调电极中的第2n3+1个解调极片ⅱ连接组成a4解调组、第2n3+2个解调极片ⅱ连接组成b4解调组,n3依次取0至m
3-1的所有整数,m3与m2互为质数;第一、第二、第三、第四解调电极沿x轴方向的长度与激励电极沿x轴方向的长度相等,且等于l。
7.所述定尺有n个,n个定尺沿x轴正方向首尾依次拼接,形成定尺组,定尺组的各个a激励组相连、各个b激励组相连、各个c激励组相连、各个d激励组相连。
8.所述动尺的基体下表面沿x轴正方向设有间距为d
os
的传感单元ⅰ和传感单元ⅱ,间距d
os
大于相邻两个定尺之间的拼接缝沿x轴方向的宽度d
is
。传感单元ⅰ由沿y轴正方向间隔排列的第一调制电极、感应电极ⅰ和第三调制电极组成,传感单元ⅱ由沿y轴正方向间隔排列的第二调制电极、感应电极ⅱ和第四调制电极组成。在z轴方向,感应电极ⅰ、感应电极ⅱ与激励电极正对,第一调制电极与第一解调电极正对,第三调制电极与第三解调电极正对,第二调制电极与第二解调电极正对,第四调制电极与第四解调电极正对;第一调制电极、第三调制电极与感应电极ⅰ相连,第二调制电极、第四调制电极与感应电极ⅱ相连。
9.测量时,n个定尺中的a1、b1、a2、b2、a3、b3、a4、b4解调组分别与时栅信号处理电路的8n个信号输入端连接,a、b、c、d激励组施加相位依次相差90
°
的四路同频等幅正弦激励信号,在动尺与定尺组之间形成交变电场,动尺沿x轴相对定尺组移动,各个定尺中的a1、b1、a2、b2、a3、b3、a4、b4解调组输出的行波信号经时栅信号处理电路处理后,得到动尺相对定尺组的绝对直线位移值s
pa
。
10.优选的,所述感应电极ⅰ、感应电极ⅱ都由4m4个大小相同、极距为w1的感应极片沿x轴正方向等间距排列组成;感应电极ⅰ中的第4n4+1个感应极片连接组成a1感应组、第4n4+2个感应极片连接组成b1感应组、第4n4+3个感应极片连接组成c1感应组、第4n4+4个感应极片连接组成d1感应组,感应电极ⅱ中的第4n4+1个感应极片连接组成a2感应组、第4n4+2个感应极片连接组成b2感应组、第4n4+3个感应极片连接组成c2感应组、第4n4+4个感应极片连接组成d2感应组,n4依次取0至m
4-1的所有整数。
11.所述第一调制电极、第二调制电极都由4m5个大小相同、极距为的矩形极片ⅱ沿x轴正方向等间距排列组成,第一调制电极中的第4n5+1个矩形极片ⅱ连接组成a1调制组、第4n5+2个矩形极片ⅱ连接组成b1调制组、第4n5+3个矩形极片ⅱ连接组成c1调制组、第4n5+4个矩形极片ⅱ连接组成d1调制组,第二调制电极中的第4n5+1个矩形极片ⅱ连接组成a2调制组、第4n5+2个矩形极片ⅱ连接组成b2调制组、第4n5+3个矩形极片ⅱ连接组成c2调制组、第4n5+4个矩形极片ⅱ连接组成d2调制组,n5依次取0至m
5-1的所有整数。
12.所述第三调制电极、第四调制电极都由4m6个大小相同、极距为的矩形极片ⅲ沿x轴正方向等间距排列组成;第三调制电极中的第4n6+1个矩形极片ⅲ连接组成a3调制组、第4n6+2个矩形极片ⅲ连接组成b3调制组、第4n6+3个矩形极片ⅲ连接组成c3调制组、第4n6+4个矩形极片ⅲ连接组成d3调制组,第四调制电极中的第4n6+1个矩形极片ⅲ连接组成a4调制组、第4n6+2个矩形极片ⅲ连接组成b4调制组、第4n6+3个矩形极片ⅲ连接组成c4调制组、第4n6+4个矩形极片ⅲ连接组成d4调制组,n6依次取0至m
6-1的所有整数。
13.a1感应组与a1、a3调制组相连,b1感应组与b1、b3调制组相连,c1感应组与c1、c3调制组相连,d1感应组与d1、d3调制组相连,a2感应组与a2、a4调制组相连,b2感应组与b2、b4调制组相连,c2感应组与c2、c4调制组相连,d2感应组与d2、d4调制组相连。
14.优选的,所述感应极片的形状为双正弦形或者斜余弦形或者方形或者菱形。
15.优选的,所述解调极片ⅰ、解调极片ⅱ的形状相同,都为双正弦形或者斜余弦形或者方形或者菱形。
16.优选的,所述时栅信号处理电路的处理方式为:先根据各个信号输入端是否有行波信号输入来判断动尺所处的定尺号数,再判断传感单元ⅰ、传感单元ⅱ所处的位置,然后根据该位置选择能用于计算的行波信号,最后利用该行波信号计算动尺相对定尺组的绝对直线位移值s
pa
。
17.优选的,根据传感单元ⅰ、传感单元ⅱ所处的位置,选择能用于计算的行波信号的具体方式为:
18.如果传感单元ⅰ、传感单元ⅱ都完全位于i号定尺上方,则:利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
计算s
pa
;或者利用i号定尺中的a2解调组输出的行波信号u
i_a2
、b2解调组输出的行波信号u
i_b2
和a4解调组输出的行波信号u
i_a4
、b4解调组输出的行波信号u
i_b4
计算s
pa
。
19.如果传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ非完全位于i号定尺上方,且传感单元ⅱ非完全位于i+1号定尺上方,则利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
计算s
pa
。
20.如果传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ完全位于i+1号定尺上方,则:利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
计算s
pa
;或者利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
计算s
pa
。
21.如果传感单元ⅱ完全位于i+1号定尺上方,且传感单元ⅰ非完全位于i号定尺上方,且传感单元ⅰ非完全位于i+1号定尺上方,则利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
计算s
pa
。
22.如果传感单元ⅰ、传感单元ⅱ都完全位于i+1号定尺上方,则:利用i+1号定尺中的a1解调组输出的行波信号u
(i+1)_a1
、b1解调组输出的行波信号u
(i+1)_b1
和a3解调组输出的行波信号u
(i+1)_a3
、b3解调组输出的行波信号u
(i+1)_b3
计算s
pa
;或者利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
计算s
pa
。
23.其中,i为整数,1≤i≤n-1。
24.优选的,利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
,计算动尺相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
i_a1
与行波信号u
i_b1
作差得差动行波信号u
i_1
,将行波信号u
i_a3
与行波信号u
i_b3
作差得差动行波信号u
i_3
;将差动行波信号u
i_1
或者差动行波信号u
i_3
进行处理,得到传感单元ⅰ在i号定尺上的精测直线位移值s
i_1_3
;将差动行波信号u
i_1
与差动行波信号u
i_3
比相后的相位差进行处理,得到传感单元ⅰ在i号定尺上的粗
测对极定位值s
i_13
;将精测直线位移值s
i_1_3
与粗测对极定位值s
i_13
相结合,得到传感单元ⅰ在i号定尺上的绝对直线位移值s
i_ⅰ;然后利用公式:s
pa
=(i-1)*(l+d
is
)+s
i_ⅰ,计算得到s
pa
。
25.优选的,利用i号定尺中的a2解调组输出的行波信号u
i_a2
、b2解调组输出的行波信号u
i_b2
和a4解调组输出的行波信号u
i_a4
、b4解调组输出的行波信号u
i_b4
,计算动尺相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
i_a2
与行波信号u
i_b2
作差得差动行波信号u
i_2
,将行波信号u
i_a4
与行波信号u
i_b4
作差得差动行波信号u
i_4
;将差动行波信号u
i_2
或者差动行波信号u
i_4
进行处理,得到传感单元ⅱ在i号定尺上的精测直线位移值s
i_2_4
;将差动行波信号u
i_2
与差动行波信号u
i_4
比相后的相位差进行处理,得到传感单元ⅱ在i号定尺上的粗测对极定位值s
i_24
;将精测直线位移值s
i_2_4
与粗测对极定位值s
i_24
相结合,得到传感单元ⅱ在i号定尺上的绝对直线位移值s
i_ⅱ;然后利用公式:s
pa
=(i-1)*(l+d
is
)+s
i_
ⅱ-d
os-s,计算得到s
pa
;其中,s等于与中的较大值。
26.优选的,利用i+1号定尺中的a1解调组输出的行波信号u
(i+1)_a1
、b1解调组输出的行波信号u
(i+1)_b1
和a3解调组输出的行波信号u
(i+1)_a3
、b3解调组输出的行波信号u
(i+1)_b3
,计算动尺相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
(i+1)_a1
与行波信号u
(i+1)_b1
作差得差动行波信号u
(i+1)_1
,将行波信号u
(i+1)_a3
与行波信号u
(i+1)_b3
作差得差动行波信号u
(i+1)_3
;将差动行波信号u
(i+1)_1
或者差动行波信号u
(i+1)_3
进行处理,得到传感单元ⅰ在i+1号定尺上的精测直线位移值s
(i+1)_1_3
;将差动行波信号u
(i+1)_1
与差动行波信号u
(i+1)_3
比相后的相位差进行处理,得到传感单元ⅰ在i+1号定尺上的粗测对极定位值s
(i+1)_13
;将精测直线位移值s
(i+1)_1_3
与粗测对极定位值s
(i+1)_13
相结合,得到传感单元ⅰ在i+1号定尺上的绝对直线位移值s
(i+1)_ⅰ;然后利用公式:s
pa
=i*(l+d
is
)+s
(i+1)_ⅰ,计算得到s
pa
。
27.优选的,利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
,计算动尺(2)相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
(i+1)_a2
与行波信号u
(i+1)_b2
作差得差动行波信号u
(i+1)_2
,将行波信号u
(i+1)_a4
与行波信号u
(i+1)_b4
作差得差动行波信号u
(i+1)_4
;将差动行波信号u
(i+1)_2
或者差动行波信号u
(i+1)_4
进行处理,得到传感单元ⅱ在i+1号定尺上的精测直线位移值s
(i+1)_2_4
;将差动行波信号u
(i+1)_2
与差动行波信号u
(i+1)_4
比相后的相位差进行处理,得到传感单元ⅱ在i+1号定尺上的粗测对极定位值s
(i+1)_24
;将精测直线位移值s
(i+1)_2_4
与粗测对极定位值s
(i+1)_24
相结合,得到传感单元ⅱ在i+1号定尺上的绝对直线位移值s
(i+1)_ⅱ;然后利用公式:s
pa
=i*(l+d
is
)+s
(i+1)_
ⅱ-d
os-s,计算得到s
pa
。
28.优选的,所述时栅信号处理电路根据各个定尺中的a1、b1、a2、b2、a3、b3、a4、b4解调组输出的行波信号,来判定传感单元ⅰ、传感单元ⅱ所处的位置,具体为:
29.若i号定尺中的a1、b1、a2、b2、a3、b3、a4、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,则判定传感单元ⅰ、传感单元ⅱ都完全位于i号定尺上方。
30.若i号定尺中的a1、b1、a3、b3解调组输出的行波信号的幅值都在预设的电压阈值范围内,且i号定尺中的a2、b2、a4、b4解调组输出的行波信号的幅值都未在预设的电压阈值范围内,且i+1号定尺中的a2、b2、a4、b4解调组输出的行波信号的幅值都未在预设的电压阈值范围内,则判定传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ非完全位于i号定尺上方,且传感单元ⅱ非完全位于i+1号定尺上方。
31.若i号定尺中的a1、b1、a3、b3解调组输出的行波信号的幅值都在预设的电压阈值范围内,且i+1号定尺中的a2、b2、a4、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,则判定传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ完全位于i+1号定尺上方。
32.若i+1号定尺中的a2、b2、a4、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,且i号定尺中的a1、b1、a3、b3解调组输出的行波信号的幅值都未在预设的电压阈值范围内,且i+1号定尺中的a1、b1、a3、b3解调组输出的行波信号的幅值都未在预设的电压阈值范围内,则判定传感单元ⅱ完全位于i+1号定尺上方,且传感单元ⅰ非完全位于i号定尺上方,且传感单元ⅰ非完全位于i+1号定尺上方。
33.若i+1号定尺中的a1、b1、a2、b2、a3、b3、a4、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,则判定传感单元ⅰ、传感单元ⅱ都完全位于i+1号定尺上方。
34.本发明具有如下效果:
35.(1)将感应电极ⅰ感应到的四路行波信号经第一调制电极、第三调制电极与第一解调电极、第三解调电极之间的耦合电场进行二次调制,将感应电极ⅱ感应到的四路行波信号经第二调制电极、第四调制电极与第二解调电极、第四解调电极之间的耦合电场进行二次调制,在第一、第二、第三、第四解调电极上输出带位移值的行波信号,激励信号和输出信号均在定尺侧,实现了动尺的无源设计。
36.(2)通过动尺的基体上第一、第二解调电极的对极数与第三、第四解调电极的对极数互为质数的方式,实现了单段定尺内传感器的绝对直线位移测量。
37.(3)将n个定尺拼接成定尺组,在动尺的基体上设计两个独立且间隔d
os
的传感单元ⅰ和传感单元ⅱ,并配合时栅信号处理电路,测量动尺相对定尺组的绝对直线位移值s
pa
,从而实现了测量范围达到几米甚至几十米的超大量程绝对直线位移测量,能打破传统的栅尺制造工艺对提升量程的限制,并且应用场景灵活。
附图说明
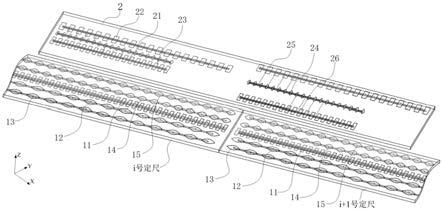
38.图1为实施例中动尺、定尺组的结构示意图。
39.图2为实施例中定尺的俯视图。
40.图3为实施例中动尺的仰视图。
41.图4为实施例中传感单元ⅰ、传感单元ⅱ在解调电极ⅰ、激励电极、解调电极ⅱ上的投影关系示意图。
42.图5为实施例中的信号处理原理框图。
具体实施方式
43.如图1至图5所示的基于组合调制原理的拼接式绝对直线位移传感器,包括n个定尺1和一个动尺2,动尺2的基体下表面与定尺1的基体上表面正对平行安装,并留有0.4mm间隙。设定x轴正方向为测量方向,动尺2的运动方向为x轴方向,平行于定尺1的基体表面且垂直于x轴的方向为y轴方向,垂直于定尺1的基体表面的方向为z轴方向。
44.如图1、图2、图4所示,定尺1的基体上表面沿y轴正方向间隔设有解调电极ⅰ、激励电极11和解调电极ⅱ。解调电极ⅰ沿x轴正方向的起始位置、解调电极ⅱ沿x轴正方向的起始位置、激励电极11沿x轴正方向的起始位置在y轴方向上对齐。
45.激励电极11由240个(即m1=60)大小相同、极距为w1=4mm的矩形极片ⅰ沿x轴正方向等间距(间距为2mm)排列组成,矩形极片ⅰ沿y轴方向的长度为10mm,矩形极片ⅰ沿x轴方向的宽度为2mm,每相邻的四个矩形极片ⅰ组成一个对极,总共有60个对极,对极宽度为16mm。其中,第4n1+1(即第1、5、...、237)个矩形极片ⅰ通过中间层第一根金属引线连成一组,组成a激励组,第4n1+2(即第2、6、...、238)个矩形极片ⅰ通过中间层第二根金属引线连成一组,组成b激励组,第4n1+3(即第3、7、...、239)个矩形极片ⅰ通过中间层第三根金属引线连成一组,组成c激励组,第4n1+4个(即第4、8、...、240)个矩形极片ⅰ通过中间层第四根金属引线连成一组,组成d激励组,n1依次取0至59的所有整数。
46.解调电极ⅰ由第一解调电极12和第二解调电极13并排组成,第一解调电极12、第二解调电极13都由82个(即m2=41)大小相同、极距为w2=11.707mm的解调极片ⅰ沿x轴正方向等间距(间距为2.92675mm)排列组成,解调极片ⅰ为双正弦形极片ⅰ,双正弦形极片ⅰ的形状为两条幅值相等、相位相差180
°
的正弦曲线在[0,π]区间围成的封闭轴对称图形ⅰ。解调极片ⅰ沿y轴方向的长度为8mm,解调极片ⅰ沿x轴方向的宽度为8.78025mm。第一解调电极12中的第2n2+1(即第1、3、...、81)个解调极片ⅰ连接组成a1解调组,第一解调电极12中的第2n2+2(即第2、4、...、82)个解调极片ⅰ连接组成b1解调组。第二解调电极13中的第2n2+1(即第1、3、...、81)个解调极片ⅰ连接组成a2解调组,第二解调电极13中的第2n2+2(即第2、4、...、82)个解调极片ⅰ连接组成b2解调组。n2依次取0至40的所有整数。
[0047]
解调电极ⅱ由第三解调电极14和第四解调电极15并排组成,第三解调电极14、第四解调电极15都由120个(即m3=60)大小相同、极距为w3=8mm的解调极片ⅱ沿x轴正方向等间距(间距为2mm)排列组成。解调极片ⅱ为双正弦形极片ⅱ,双正弦形极片ⅱ的形状为两条幅值相等、相位相差180
°
的正弦曲线在[0,π]区间围成的封闭轴对称图形ⅱ;解调极片ⅱ沿y轴方向的长度为8mm,解调极片ⅱ沿x轴方向的宽度为6mm。第三解调电极14中的第2n3+1(即第1、3、...、119)个解调极片ⅱ连接组成a3解调组,第三解调电极14中的第2n3+2(即第2、4、...、120)个解调极片ⅱ连接组成b3解调组。第四解调电极15中的第2n3+1(即第1、3、...、119)个解调极片ⅱ连接组成a4解调组,第四解调电极15中的第2n3+2(即第2、4、...、120)个解调极片ⅱ连接组成b4解调组,n3依次取0至59的所有整数。第一解调电极12、第二解调电极13、第三解调电极14、第四解调电极15沿x轴方向的长度与激励电极11沿x轴方向的长度为l=960mm。
[0048]
n个定尺1沿x轴正方向首尾依次拼接,形成定尺组,各个定尺的基体头部、尾部的底层为供激励输入的焊盘,该焊盘也作为相邻两个定尺中一个定尺的尾部与另一个定尺的头部的连接部位,从而实现定尺组的各个a激励电极组相连、各个b激励电极组相连、各个c激励电极组相连、各个d激励电极组相连相连,构造沿x轴方向的交变电场。
[0049]
如图1、图3、图4所示,动尺2的基体下表面沿x轴正方向设有间距为d
os
的传感单元ⅰ和传感单元ⅱ,间距d
os
比相邻两个定尺之间的拼接缝沿x轴方向的宽度d
is
大6mm(即d
os
=d
is
+6)。
[0050]
传感单元ⅰ由沿y轴正方向间隔排列的第一调制电极22、感应电极ⅰ21和第三调制电极23组成。传感单元ⅱ由沿y轴正方向间隔排列的第二调制电极25、感应电极ⅱ24和第四调制电极26组成。第一调制电极22沿x轴正方向的起始位置、第三调制电极23沿x轴正方向的起始位置、感应电极ⅰ21沿x轴正方向的起始位置在y轴方向上对齐。第二调制电极25沿x
轴正方向的起始位置、第四调制电极26沿x轴正方向的起始位置、感应电极ⅱ24沿x轴正方向的起始位置在y轴方向上对齐。
[0051]
感应电极ⅰ21、感应电极ⅱ24都由20个(即m4=5)大小相同、极距为w1=4mm的感应极片沿x轴正方向等间距(间距为2mm)排列组成,感应极片为双正弦形极片ⅲ,双正弦形极片ⅲ的形状为两条幅值相等、相位相差180
°
的正弦曲线在[0,π]区间围成的封闭轴对称图形ⅲ。感应极片沿y轴方向的长度为8mm,感应极片沿x轴方向的宽度为2mm。感应电极ⅰ21中的第4n4+1(即第1、5、...、17)个感应极片连接组成a1感应组,感应电极ⅰ21中的第4n4+2(即第2、6、...、18)个感应极片连接组成b1感应组,感应电极ⅰ21中的第4n4+3(即第3、7、...、19)个感应极片连接组成c1感应组,感应电极ⅰ21中的第4n4+4(即第4、8、...、20)个感应极片连接组成d1感应组。感应电极ⅱ24中的第4n4+1(即第1、5、...、17)个感应极片连接组成a2感应组,感应电极ⅱ24中的第4n4+2(即第2、6、...、18)个感应极片连接组成b2感应组,感应电极ⅱ24中的第4n4+3(即第3、7、...、19)个感应极片连接组成c2感应组,感应电极ⅱ24中的第4n4+4(即第4、8、...、20)个感应极片连接组成d2感应组。n4依次取0至4的所有整数。
[0052]
第一调制电极22、第二调制电极25都由20个(即m5=5)大小相同、极距为5.8535mm的矩形极片ⅱ沿x轴正方向等间距(间距为2.92675mm)排列组成。矩形极片ⅱ沿y轴方向的长度为10mm,矩形极片ⅱ沿x轴方向的宽度为2.92675mm,每相邻的四个矩形极片ⅱ组成一个对极,总共有5个对极,对极宽度为23.414mm。第一调制电极22中的第4n5+1(即第1、5、...、17)个矩形极片ⅱ连接组成a1调制组,第一调制电极22中的第4n5+2(即第2、6、...、18)个矩形极片ⅱ连接组成b1调制组,第一调制电极22中的第4n5+3(即第3、7、...、19)个矩形极片ⅱ连接组成c1调制组,第一调制电极22中的第4n5+4(即第4、8、...、20)个矩形极片ⅱ连接组成d1调制组。第二调制电极25中的第4n5+1(即第1、5、...、17)个矩形极片ⅱ连接组成a2调制组,第二调制电极25中的第4n5+2(即第2、6、...、18)个矩形极片ⅱ连接组成b2调制组,第二调制电极25中的第4n5+3(即第3、7、...、19)个矩形极片ⅱ连接组成c2调制组,第二调制电极25中的第4n5+4(即第4、8、...、20)个矩形极片ⅱ连接组成d2调制组。n5依次取0至4的所有整数。
[0053]
第三调制电极23、第四调制电极26都由20个(即m6=5)个大小相同、极距为4mm的矩形极片ⅲ沿x轴正方向等间距(间距为2mm)排列组成。矩形极片ⅲ沿y轴方向的长度为10mm,矩形极片ⅲ沿x轴方向的宽度为2mm,每相邻的四个矩形极片ⅲ组成一个对极,总共有5个对极,对极宽度为16mm。第三调制电极23中的第4n6+1(即第1、5、...、17)个矩形极片ⅲ连接组成a3调制组,第三调制电极23中的第4n6+2(即第2、6、...、18)个矩形极片ⅲ连接组成b3调制组,第三调制电极23中的第4n6+3(即第3、7、...、19)个矩形极片ⅲ连接组成c3调制组,第三调制电极23中的第4n6+4(即第4、8、...、20)个矩形极片ⅲ连接组成d3调制组。第四调制电极26中的第4n6+1(即第1、5、...、17)个矩形极片ⅲ连接组成a4调制组,第四调制电极26中的第4n6+2(即第2、6、...、18)个矩形极片ⅲ连接组成b4调制组,第四调制电极26中的第4n6+3(即第3、7、...、19)个矩形极片ⅲ连接组成c4调制组,第四调制电极26中的第4n6+4(即第4、8、...、20)个矩形极片ⅲ连接组成d4调制组。n6依次取0至4的所有整数。
[0054]
a1感应组与a1调制组、a3调制组通过引线相连,b1感应组与b1调制组、b3调制组通过引线相连,c1感应组与c1调制组、c3调制组通过引线相连,d1感应组与d1调制组、d3调制组通过引线相连,a2感应组与a2调制组、a4调制组通过引线相连,b2感应组与b2调制组、b4调制组
通过引线相连,c2感应组与c2调制组、c4调制组通过引线相连,d2感应组与d2调制组、d4调制组通过引线相连。
[0055]
在z轴方向,感应电极ⅰ21、感应电极ⅱ24与激励电极11正对,第一调制电极22与第一解调电极12正对,第三调制电极23与第三解调电极14正对,第二调制电极25与第二解调电极13正对,第四调制电极26与第四解调电极15正对。
[0056]
n个定尺中的a1解调组、b1解调组、a2解调组、b2解调组、a3解调组、b3解调组、a4解调组、b4解调组分别与时栅信号处理电路的8n个信号输入端连接(即一个解调组对应一个信号输入端,总共的8n个解调组与8n个信号输入端一一对应连接)。测量时,a、b、c、d激励组施加相位依次相差90
°
的四路同频等幅正弦激励信号,动尺2沿x轴相对定尺组移动,各个定尺中的a1解调组、b1解调组、a2解调组、b2解调组、a3解调组、b3解调组、a4解调组、b4解调组输出的行波信号经时栅信号处理电路处理后,得到动尺2相对定尺组的绝对直线位移值s
pa
。
[0057]
设定沿x轴正方向,i号定尺的尾部与i+1号定尺的头部相连(即i号定尺的尾部与i+1号定尺的头部拼接在一起)。其中,i为整数,1≤i≤n-1。
[0058]
如图5所示,时栅信号处理电路的处理方式为:先根据各个信号输入端是否有行波信号输入来判断动尺所处的定尺号数,再判断传感单元ⅰ、传感单元ⅱ所处的位置,然后根据该位置选择能用于计算的行波信号,最后利用该行波信号计算动尺2相对定尺组的绝对直线位移值s
pa
。
[0059]
如果动尺位于某号定尺或者某相邻两号定尺上方,则该号定尺或者该相邻两号定尺上的各解调组会产生行波信号,并通过对应的信号输入端输入时栅信号处理电路,时栅信号处理电路就根据各个信号输入端是否有行波信号输入来判断动尺所处的定尺号数。
[0060]
时栅信号处理电路根据各个定尺中的a1解调组、b1解调组、a2解调组、b2解调组、a3解调组、b3解调组、a4解调组、b4解调组输出的行波信号,来判定传感单元ⅰ、传感单元ⅱ所处的位置,具体为:
[0061]
若i号定尺中的a1解调组、b1解调组、a2解调组、b2解调组、a3解调组、b3解调组、a4解调组、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,则判定传感单元ⅰ、传感单元ⅱ都完全位于i号定尺上方;此时编码a,可判定动尺所处定尺组空间位置为“前全后零”。
[0062]
若i号定尺中的a1解调组、b1解调组、a3解调组、b3解调组输出的行波信号的幅值都在预设的电压阈值范围内,且i号定尺中的a2解调组、b2解调组、a4解调组、b4解调组输出的行波信号的幅值都未在预设的电压阈值范围内,且i+1号定尺中的a2解调组、b2解调组、a4解调组、b4解调组输出的行波信号的幅值都未在预设的电压阈值范围内,则判定传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ非完全位于i号定尺上方(包含传感单元ⅱ部分位于i号定尺上方和传感单元ⅱ一点儿都不位于i号定尺上方两种情况),且传感单元ⅱ非完全位于i+1号定尺上方(包含传感单元ⅱ部分位于i+1号定尺上方和传感单元ⅱ一点儿都不位于i+1号定尺上方两种情况),此时编码b,可判定动尺所处定尺组空间位置为“前全后半”。
[0063]
若i号定尺中的a1解调组、b1解调组、a3解调组、b3解调组输出的行波信号的幅值都在预设的电压阈值范围内,且i+1号定尺中的a2解调组、b2解调组、a4解调组、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,则判定传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ完全位于i+1号定尺上方,此时编码c,可判定动尺所处定尺组空间位置为“前
半后半”。
[0064]
若i+1号定尺中的a2解调组、b2解调组、a4解调组、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,且i号定尺中的a1解调组、b1解调组、a3解调组、b3解调组输出的行波信号的幅值都未在预设的电压阈值范围内,且i+1号定尺中的a1解调组、b1解调组、a3解调组、b3解调组输出的行波信号的幅值都未在预设的电压阈值范围内,则判定传感单元ⅱ完全位于i+1号定尺上方,且传感单元ⅰ非完全位于i号定尺上方(包含传感单元ⅰ部分位于i号定尺上方和传感单元ⅰ一点儿都不位于i号定尺上方两种情况),且传感单元ⅰ非完全位于i+1号定尺上方(包含传感单元ⅰ部分位于i+1号定尺上方和传感单元ⅰ一点儿都不位于i+1号定尺上方两种情况),此时编码d,可判定动尺所处定尺组空间位置为“前半后全”。
[0065]
若i+1号定尺中的a1解调组、b1解调组、a2解调组、b2解调组、a3解调组、b3解调组、a4解调组、b4解调组输出的行波信号的幅值都在预设的电压阈值范围内,则判定传感单元ⅰ、传感单元ⅱ都完全位于i+1号定尺上方。此时编码e,可判定动尺所处定尺组空间位置为“前零后全”。
[0066]
时栅信号处理电路根据传感单元ⅰ、传感单元ⅱ所处的位置,选择能用于计算的行波信号的具体方式为:
[0067]
如果传感单元ⅰ、传感单元ⅱ都完全位于i号定尺上方(即编码为a时),则利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
计算s
pa
。此种情况下,也可以利用i号定尺中的a2解调组输出的行波信号u
i_a2
、b2解调组输出的行波信号u
i_b2
和a4解调组输出的行波信号u
i_a4
、b4解调组输出的行波信号u
i_b4
计算s
pa
。
[0068]
如果传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ非完全位于i号定尺上方,且传感单元ⅱ非完全位于i+1号定尺上方(即编码为b时),则利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
计算s
pa
。
[0069]
如果传感单元ⅰ完全位于i号定尺上方,且传感单元ⅱ完全位于i+1号定尺上方(即编码为c时),则利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
计算s
pa
。此种情况下也可以利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
计算s
pa
。
[0070]
如果传感单元ⅱ完全位于i+1号定尺上方,且传感单元ⅰ非完全位于i号定尺上方,且传感单元ⅰ非完全位于i+1号定尺上方(即编码为d时),则利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
计算s
pa
。
[0071]
如果传感单元ⅰ、传感单元ⅱ都完全位于i+1号定尺上方(即编码为e时),则利用i+1号定尺中的a1解调组输出的行波信号u
(i+1)_a1
、b1解调组输出的行波信号u
(i+1)_b1
和a3解调组输出的行波信号u
(i+1)_a3
、b3解调组输出的行波信号u
(i+1)_b3
计算s
pa
。此种情况下也可以利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
计算s
pa
。
[0072]
利用i号定尺中的a1解调组输出的行波信号u
i_a1
、b1解调组输出的行波信号u
i_b1
和
a3解调组输出的行波信号u
i_a3
、b3解调组输出的行波信号u
i_b3
,计算动尺2相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
i_a1
与行波信号u
i_b1
作差得(即经减法电路合成)差动行波信号u
i_1
,将行波信号u
i_a3
与行波信号u
i_b3
作差得(即经减法电路合成)差动行波信号u
i_3
;将差动行波信号u
i_3
进行处理,得到传感单元ⅰ在i号定尺上的精测直线位移值s
i_1_3
;将差动行波信号u
i_1
与差动行波信号u
i_3
比相后的相位差进行处理,得到传感单元ⅰ在i号定尺上的粗测对极定位值s
i_13
;将精测直线位移值s
i_1_3
与粗测对极定位值s
i_13
相结合,得到传感单元ⅰ在i号定尺上的绝对直线位移值s
i_ⅰ;然后利用公式:s
pa
=(i-1)*(l+d
is
)+s
i_ⅰ,计算得到s
pa
。
[0073]
利用i号定尺中的a2解调组输出的行波信号u
i_a2
、b2解调组输出的行波信号u
i_b2
和a4解调组输出的行波信号u
i_a4
、b4解调组输出的行波信号u
i_b4
,计算动尺2相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
i_a2
与行波信号u
i_b2
作差得(即经减法电路合成)差动行波信号u
i_2
,将行波信号u
i_a4
与行波信号u
i_b4
作差得(即经减法电路合成)差动行波信号u
i_4
;将差动行波信号u
i_4
进行处理,得到传感单元ⅱ在i号定尺上的精测直线位移值s
i_2_4
;将差动行波信号u
i_2
与差动行波信号u
i_4
比相后的相位差进行处理,得到传感单元ⅱ在i号定尺上的粗测对极定位值s
i_24
;将精测直线位移值s
i_2_4
与粗测对极定位值s
i_24
相结合,得到传感单元ⅱ在i号定尺上的绝对直线位移值s
i_ⅱ;然后利用公式:s
pa
=(i-1)*(l+d
is
)+s
i_
ⅱ-d
os-s,计算得到s
pa
;其中,s等于与中的较大值,此实施例中s=117.07mm。
[0074]
利用i+1号定尺中的a1解调组输出的行波信号u
(i+1)_a1
、b1解调组输出的行波信号u
(i+1)_b1
和a3解调组输出的行波信号u
(i+1)_a3
、b3解调组输出的行波信号u
(i+1)_b3
,计算动尺2相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
(i+1)_a1
与行波信号u
(i+1)_b1
作差得差动行波信号u
(i+1)_1
,将行波信号u
(i+1)_a3
与行波信号u
(i+1)_b3
作差得差动行波信号u
(i+1)_3
;将差动行波信号u
(i+1)_3
进行处理,得到传感单元ⅰ在i+1号定尺上的精测直线位移值s
(i+1)_1_3
;将差动行波信号u
(i+1)_1
与差动行波信号u
(i+1)_3
比相后的相位差进行处理,得到传感单元ⅰ在i+1号定尺上的粗测对极定位值s
(i+1)_13
;将精测直线位移值s
(i+1)_1_3
与粗测对极定位值s
(i+1)_13
相结合,得到传感单元ⅰ在i+1号定尺上的绝对直线位移值s
(i+1)_ⅰ;然后利用公式:s
pa
=i*(l+d
is
)+s
(i+1)_ⅰ,计算得到s
pa
。
[0075]
利用i+1号定尺中的a2解调组输出的行波信号u
(i+1)_a2
、b2解调组输出的行波信号u
(i+1)_b2
和a4解调组输出的行波信号u
(i+1)_a4
、b4解调组输出的行波信号u
(i+1)_b4
,计算动尺2相对定尺组的绝对直线位移值s
pa
的具体方式为:将行波信号u
(i+1)_a2
与行波信号u
(i+1)_b2
作差得差动行波信号u
(i+1)_2
,将行波信号u
(i+1)_a4
与行波信号u
(i+1)_b4
作差得差动行波信号u
(i+1)_4
;将差动行波信号u
(i+1)_4
进行处理,得到传感单元ⅱ在i+1号定尺上的精测直线位移值s
(i+1)_2_4
;将差动行波信号u
(i+1)_2
与差动行波信号u
(i+1)_4
比相后的相位差进行处理,得到传感单元ⅱ在i+1号定尺上的粗测对极定位值s
(i+1)_24
;将精测直线位移值s
(i+1)_2_4
与粗测对极定位值s
(i+1)_24
相结合,得到传感单元ⅱ在i+1号定尺上的绝对直线位移值s
(i+1)_ⅱ;然后利用公式:s
pa
=i*(l+d
is
)+s
(i+1)_
ⅱ-d
os-s,计算得到s
pa
;其中,s等于与中的较大值,此实施例中s=117.07mm。
[0076]
本实施例通过将n个定尺首尾依次拼接形成定尺组,从而将原本单个定尺长度为
960mm的量程,扩大为n*960mm,从而实现了超大量程的绝对直线位移测量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1