一种用于二维DOA估计的互质平面阵列结构及布阵方法
letters,vol.25,no.1,pp.157
–
160,2020》提出了一种孔洞填充的方法,通过在合适位置添加两个额外阵元,有效填补上互质面阵差分阵中的部分孔洞,使得自由度得到进一步提高。
4.在本发明的技术方案的实现过程中,发明人发现:目前,稀疏面阵研究的重点就在于设计出有闭合表达式的阵列,从阵列结构上提升自由度或减小互耦,但现有的研究仍不够深入,阵列性能仍有改进空间。因此,基于互质规律,设计出自由度高的新型面阵结构对二维doa的精确估计具有重要意义。
技术实现要素:
5.本发明提供了一种用于二维doa估计的互质平面阵列结构及布阵方法,用于提升二维doa估计精度和增加可估计的信源数。
6.一方面,本发明提供了一种用于二维doa估计的互质平面阵列结构,包括三个分布于二维平面的均匀矩形子阵s1、s2和s3;
7.所述均匀矩形子阵s1包含(4m
1-1)n2个阵元,子阵s1的阵元位置集合为:s1={(x,y)|x∈x1,y∈y1};其中,(x,y)表示阵元的二维平面坐标,x1、y1分别表示子阵s1的阵元位置的横坐标值域和纵坐标值域,x1={n1m-n1(2m
1-1)|m∈[0,4m
1-2]},y1={l2+m2n|n∈[0,n
2-1]},m1和n1、m2和n2为两组预置的互质整数,其中,l2表示子阵s1相较于坐标原点的纵向移位,m、n为整数;
[0008]
所述均匀矩形子阵s2包含(4m
2-1)n1个阵元,子阵s2的阵元位置集合为s2={(x,y)|x∈x2,y∈y2};其中,x2、y2分别表示子阵s2的阵元位置的横坐标值域和纵坐标值域,x2={l1+m1n|n∈[0,n
1-1]},y2={n2m-n2(2m
2-1)|m∈[0,4m
2-2]},其中,l1表示子阵s2相较于坐标原点的横向移位;
[0009]
所述均匀矩形子阵s3包含(4m
2-1)n1个阵元,子阵s3的阵元位置集合为s3={(x,y)|x∈-x2,y∈y2};
[0010]
去除均匀矩形子阵s1、s2和s3之间的冗余阵元得到互质平面阵列结构,所述互质平面阵列结构的阵元位置为:sd=(s1∪s2∪s3)d,其中,d表示单位阵元间距,d≤λ/2,λ表示载波波长。
[0011]
另一方面,本发明还提供了一种用于二维doa估计的互质平面阵列的布阵方法,包括下列步骤:
[0012]
步骤1:配置阵列参数信息,包括:两组互质整数m1和n1,以及m2和n2,阵元间距d,其中d≤λ/2,λ表示载波波长;
[0013]
步骤2:设置三个均匀矩形子阵s1、s2和s3:
[0014]
所述均匀矩形子阵s1包含(4m
1-1)n2个阵元,子阵s1的阵元位置集合为s1={(x,y)|x∈x1,y∈y1};其中,(x,y)表示阵元的二维平面坐标,x1、y1分别表示子阵s1的阵元位置的横坐标值域和纵坐标值域,x1={n1m-n1(2m
1-1)|m∈[0,4m
1-2]},y1={l2+m2n|n∈[0,n
2-1]},m1和n1、m2和n2为两组预置的互质整数,l2表示子阵s1相较于坐标原点的纵向移位;
[0015]
所述均匀矩形子阵s2包含(4m
2-1)n1个阵元,子阵s2的阵元位置集合为s2={(x,y)|x∈x2,y∈y2};其中,x2、y2分别表示子阵s2的阵元位置的横坐标值域和纵坐标值域,x2={l1+m1n|n∈[0,n
1-1]},y2={n2m-n2(2m
2-1)|m∈[0,4m
2-2]},l1表示子阵s2相较于坐标原点的横向移位;
[0016]
所述均匀矩形子阵s3与均匀矩形子阵s2关于纵坐标对称分布;
[0017]
步骤3:去除三个子阵之间的冗余阵元位置,得到互质平面阵列结构,所述互质平面阵列结构的阵元位置为:sd=(s1∪s2∪s3)d。
[0018]
本发明实施例提供的技术方案至少带来如下有益效果:
[0019]
在本发明中,所提出的阵列对称分布,具有规律的闭合表达式;受互耦影响小;阵元数一定时,相较于现有互质面阵可获得更高的自由度。从而可实现低成本,高测向精度的二维doa估计。
附图说明
[0020]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0021]
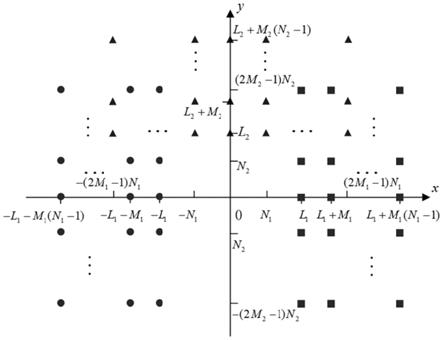
图1为本发明实施例提供的用于二维doa估计的互质平面阵列结的示意图;
[0022]
图2为本发明实施例中,不同稀疏阵列结构自由度随阵元总数变化的关系示意图;
[0023]
图3为本发明实施例中,不同稀疏阵列结构doa估计值与实际值的关系示意图,其中,(3-a)表示ura结构,(3-b)表示sirc结构,(3-c)表示ccpa结构,(3-d)表示本发明实施例提出的对称移位互质面阵(sdcpa)结构;
[0024]
图4为本发明实施例中,不同稀疏阵列结构doa估计性能随snr变化的关系示意图;
[0025]
图5为本发明实施例中,不同稀疏阵列结构doa估计性能随快拍数变化的关系示意图;
[0026]
图6为本发明实施例中,不同稀疏阵列结构doa估计性能随信源数变化的关系示意图。
具体实施方式
[0027]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
[0028]
针对现有互质面阵自由度较小,导致二维doa估计精度不高的技术问题,本发明实施例提出了一种对称移位互质面阵(symmetric displaced coprime planar array,sdcpa)的阵列结构,其中,阵元(物理阵元)可以是天线单元、传感器等阵列单元,该结构在阵列单元(如天线单元)数相同的情况下,能够获得比现有互质面阵更高的自由度,从而有效提高二维doa估计精度和增加可估计的信源数。
[0029]
本发明实施例提供的一种用于二维doa估计的互质平面阵列结构,包括三个分布于二维平面的均匀矩形子阵s1、s2和s3;
[0030]
所述均匀矩形子阵s1包含(4m
1-1)n2个阵元,子阵s1的阵元位置集合为:s1={(x,y)|x∈x1,y∈y1};其中,(x,y)表示阵元的二维平面坐标,x1、y1分别表示子阵s1的阵元位置的横坐标值域和纵坐标值域,x1={n1m-n1(2m
1-1)|m∈[0,4m
1-2]},y1={l2+m2n|n∈[0,n
2-1]},m1和n1、m2和n2为两组预置的互质整数,其中,l2表示子阵s1与坐标原点之间的间距(相
较于原点的纵向移位),优选的,可设置
[0031]
所述均匀矩形子阵s2包含(4m
2-1)n1个阵元,子阵s2的阵元位置集合为s2={(x,y)|x∈x2,y∈y2};其中,x2、y2分别表示子阵s2的阵元位置的横坐标值域和纵坐标值域,x2={l1+m1n|n∈[0,n
1-1]},y2={n2m-n2(2m
2-1)|m∈[0,4m
2-2]},其中,l1表示子阵s2与坐标原点之间的间距,优选的,可设置
[0032]
所述均匀矩形子阵s3与均匀矩形子阵s2关于纵坐标对称分布,即子阵s3包含(4m
2-1)n1个阵元,其阵元位置集合为s3={(x,y)|x∈-x2,y∈y2};
[0033]
去除均匀矩形子阵s1、s2和s3之间的冗余阵元得到互质平面阵列结构,所述互质平面阵列结构的阵元位置为:sd=(s1∪s2∪s3)d,其中,d表示单位阵元间距,d≤λ/2,λ表示载波波长。
[0034]
需要说明的是,本发明实施例中所提供的用于二维doa估计的互质平面阵列结构中,均匀矩形子阵s1既可以位于横轴的上方,也可以位于横轴的下方,即可以将子阵s1替换为s1′
,子阵s1′
为均匀矩形子阵,包括(4m
1-1)n2个阵元,其阵元位置集合为:s1′
={(x,y)|x∈x1,y∈-y1}。
[0035]
另一方面,本发明实施例还提供了一种用于二维doa估计的互质平面阵列的布阵方法,包括下列步骤:
[0036]
步骤1:配置阵列参数信息,包括:两组互质整数m1和n1,以及m2和n2,阵元间距d,其中d≤λ/2,λ表示载波波长;
[0037]
步骤2:设置三个均匀矩形子阵s1、s2和s3:
[0038]
所述均匀矩形子阵s1包含(4m
1-1)n2个阵元,子阵s1的阵元位置集合为s1={(x,y)|x∈x1,y∈y1};其中,(x,y)表示阵元的二维平面坐标,x1、y1分别表示子阵s1的阵元位置的横坐标值域和纵坐标值域,x1={n1m-n1(2m
1-1)|m∈[0,4m
1-2]},y1={l2+m2n|n∈[0,n
2-1]},m1和n1、m2和n2为两组预置的互质整数,l2表示子阵s1相较于坐标原点的纵向移位;
[0039]
所述均匀矩形子阵s2包含(4m
2-1)n1个阵元,子阵s2的阵元位置集合为s2={(x,y)|x∈x2,y∈y2};其中,x2、y2分别表示子阵s1的阵元位置的横坐标值域和纵坐标值域,x2={l1+m1n|n∈[0,n
1-1]},y2={n2m-n2(2m
2-1)|m∈[0,4m
2-2]},l1表示子阵s2相较于坐标原点的横向移位;
[0040]
所述均匀矩形子阵s3与均匀矩形子阵s2关于纵坐标对称分布;
[0041]
步骤3:去除三个子阵之间的冗余阵元位置,得到互质平面阵列结构,所述互质平面阵列结构的阵元位置为:sd=(s1∪s2∪s3)d。
[0042]
综上,本发明实施例所提供的用于二维doa估计的互质平面阵列结构,其所包括的三个均匀矩形子阵列中,在水平方向上对称分布,子阵s2与s3相较于子阵s1在水平和垂直方向上均有移位,整个结构呈“门”型。本发明实施例提供的sdcpa结构的阵元位置具有解析表达式,拓展了阵列孔径,且能获得高于已有互质面阵的自由度。因此本发明能够结合常规的信号到达角估计算法实现更高精度的二维doa估计。
[0043]
为了进一步验证本发明实施例所提供的用于二维doa估计的互质平面阵列结构,以及布阵方法所得到的阵列的性能,通过下述仿真实验进行验证。
[0044]
步骤(1):设置天线阵列:
[0045]
基于互质思想进行二维布阵,设置一个如图1所示的对称移位互质面阵(sdcpa),其中,m1=9,n1=2,m2=5,n2=2。子阵1(即子阵s1)的阵元数为(4m
1-1)n2=70,阵元横向间距为n1d=2d,纵向间距为m2d=5d。子阵2(即子阵s2)和子阵3(即子阵s3)的阵元数均为(4m
2-1)n1=38,阵元横向间距为m1d=9d,纵向间距为n2d=2d。即m1用于表示子阵2和3的阵元横向间距,m2用于表示子阵2和3的阵元纵向间距,n1、n2分别用于表示子阵1的阵元横向间距和阵元纵向间距。本发明实施例中,sdcpa阵列的阵元位置可表示为sd,其中s是一个整数集合,表达式为:
[0046]
s=s1∪s2∪s3[0047]
={(x,y)|x∈x1,y∈y1}∪{(x,y)|x∈x2,y∈y2}∪{(x,y)|x∈-x2,y∈y2}
[0048]
x1={n1m-n1(2m
1-1)|m∈[0,4m
1-2]}
[0049]
y1={l2+m2n|n∈[0,n
2-1],
[0050]
x2={l1+m1n|n∈[0,n
1-1],
[0051]
y2={n2m-n2(2m
2-1)|m∈[0,4m
2-2]}
[0052]
其中,l1和l2是三个子阵相较于原点的移位,由此可以扩大整体阵列的阵列孔径。此外,通过设置合适的移位值:使得子阵1与子阵2、3之间的互差分阵中间位置的孔洞得以填充,从而极大地扩展了差分阵中的连续部分,提高了自由度。
[0053]
去除子阵间的重复阵元后,所提出的sdcpa结构,可以通过2n1(4m
2-1)+n2(4m
1-1)-2个物理阵元实现(2d
x
+1)*(2dy+1)个自由度,其中+1)个自由度,其中相较于现有的二维互质面阵,自由度得到了很大的提升,从而可以实现更为精确的二维doa估计。
[0054]
步骤(2):阵列接收数据建模:
[0055]
设有k个窄带远场不相干信号入射到阵元数为n的稀疏面阵中,阵元位置为sd={p1,...,pj,...,pn}d,任意阵元位置pj=(n
xj
,n
yj
)。信号的入射角度为(θk,φk),k=1,...,k,其中,θk和φk分别表示信号的俯仰角和方位角。阵列的观测数据矢量可表示为:
[0056]
x(t)=as(t)+n(t)
[0057]
其中,s(t)=[s1(t),...,sk(t)]
t
表示信号矢量,上标“t”表示转置。n(t)表示均值为零的加性高斯白噪声矢量,噪声功率为且与入射信号不相关。a=[a(θ1,φ1),...,a(θk,φk)]表示空间导阵列流型,表示第j个阵元对应于第k个信号的导向矢量,其中αk=sinθkcosφk)/λ,βk=sinθksinφk)/λ。t=1,2,...,t,t表示总快拍数。
[0058]
步骤(3):生成差分阵列的等效接收数据.
[0059]
观测数据矢量x(t)的协方差矩阵r
x
的表达式为:
[0060][0061]
其中,e{
·
}表示数学期望运算,是信源协方差矩阵,信号功率为上标“h”表示共轭。在实际工作中,协方差矩阵r
x
可以计算为:
[0062][0063]
将协方差矩阵列向量化得到:
[0064][0065]
其中,vec(
·
)表示矩阵列向量化运算,表示等效信源矢量,1n=vec(in)表示等效噪声矢量。ad=a
*
⊙
a,ad可以看作为差分阵列的导向矩阵,而差分阵列的阵元位置坐标集合为其中,上标“*”表示复共轭。
[0066]
去除矢量z中对应于冗余阵元的数据,并进行元素重排序处理,得到:
[0067][0068]
其中,表示差分阵列中连续ura的导向矩阵,为差分阵列的等效接收数据矢量,表示噪声矢量。
[0069]
步骤(4):建立互耦条件下阵列接收数据模型。
[0070]
在实际应用中,互耦影响往往不可忽略,信号模型修改为:
[0071]
x(t)=cas(t)+n(t)
[0072]
其中,c为互耦系数矩阵,可近似表示为:
[0073][0074]
|| ||2表示向量2范数,c0=1,c
l
=c1e
jπ(l-1)/4
/l,2≤l≤b。
[0075]
步骤(5):估计入射信号doa。
[0076]
本仿真实验中,采用unitary-esprit算法,将上述方向矩阵与等效协方差矩阵转换成实值,并根据相同t矩阵,构造出合并矩阵,进行特征分解,得到配对好的俯仰角和方位角信息。
[0077]
为说明本发明实施例所提出的sdcpa结构在二维doa估计精度提升方面的优势,本实施例中设计了三组仿真实验。实验2和3采用阵元数n=144的sdcpa阵列,其中m1=9,n1=2,m2=5,n2=2。以均匀矩形阵(ura)(n
x
=ny=12)、补充互质面阵(ccpa)(m=8,n=9)、加强型对称矩形互质阵(sirca)(m=4,n=5)作为比较对象。采用unitary-esprit算法进行doa估计,为突出所提出阵列结构在提高自由度方面的优势,考虑弱互耦环境,c0=0.1,b=5。三组仿真实验均采用500次蒙特卡罗实验。
[0078]
实验1:自由度。
[0079]
针对各阵列结构连续自由度udof随阵元总数的变化关系。在给定阵元数下,选取各阵列自由度最大的最优结构。如图2所示,相较于ura、ccpa、sirca,本发明实施例所提出
的sdcpa结构在自由度方面有着明显提升,且这种优势随着总阵元数的增加愈发显著。
[0080]
实验2:检测能力。
[0081]
针对各阵列结构对多信源的检测能力。实验中设置100个窄带平稳独立信号源,入射角度参数设置采用文献《c.-l.liu and p.p.vaidyanathan,“hourglass arrays and other novel 2-d sparse arrays with reduce d mutual coupling,”ieee transactions on signal processing,vol.65,no.13,pp.3369
–
3383,2017》所提出的角度模型。信噪比为0db,快拍数为500。各阵列的doa估计结果如图3所示,只有所提出的sdcpa结构可以准确识别出所有信源角度,其余结构都会产生不理想的估计结果。
[0082]
实验3:均方误差(rmse)。
[0083]
针对各阵列结构均方误差(rmse)估计性能,信源设置与实验2相同。
[0084]
图4表示doa估计的rmse随snr的变化关系,实验中设置快拍数为500,信噪比仿真范围为-30db到10db。从图中可以看到随着信噪比的增加,除ura外所有阵列结构的rmse都会显著降低,所提出的sdcpa结构在稳定(高信噪比)环境下,具有更低的rmse。
[0085]
图5表示doa估计的rmse随快拍数的变化关系,实验中设置信噪比为0db,快拍数仿真范围为50到800。由图所示,随着快拍数的增加,所提出的sdcpa结构的rmse迅速下降,当快拍数大于200时,可实现更为精确的doa估计。
[0086]
图6表示doa估计的rmse随信源数的变化关系,实验中设置信噪比为0db,快拍数为500。从图中可见随着信源数的增多,所有阵列结构的rmse都会增加。当信源数增加到一定程度时,由于自由度的限制,部分阵列无法完成doa估计,ura、ccpa、sirca的rmse曲线依次消失。而所提出的sdcpa结构可以估计出更多的信源,并且有着令人满意的估计精度。
[0087]
因此,本发明实施例提供的对称移位互质面阵(sdcpa)能够获得高于已有互质面阵的自由度,并实现更为精确的二维doa估计。可以应用于无线通信、声呐、定位等领域。
[0088]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
[0089]
以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1