一种速率光纤陀螺仪标度因数标定方法与流程
1.本发明涉及光纤陀螺仪,具体涉及一种速率光纤陀螺仪标度因数标定 方法。
背景技术:
2.光纤陀螺是一种新型的全固态惯性仪表,具有高可靠、长寿命、快速 启动、大动态范围等多方面优势,精度可以覆盖从战术级到战略级、从军 用到民用的多种领域,具有良好的应用前景。
3.光纤陀螺仪主要由光路和电路两部分组成,光路主要由光源、探测 器、光纤耦合器、相位调制器和光纤环组成,电路主要由信号处理电路和 光源驱动电路组成。其结构组成如图1所示:
4.速率光纤陀螺仪是指输出为当前实时角速率的光纤陀螺仪。该陀螺仪 主要技术指标如下:
5.1、零偏
6.零偏是指当陀螺仪输入角速率为零时,陀螺仪的输出值,以规定时间 内测得的输出量平均值相应的等效输入角速率表示,单位为(
°
/s)。
7.2、标度因数
8.标度因数是指陀螺仪输出量与输入角速率的比值;单位为^/(
°
/s)。 光纤陀螺仪的输出可以用公式表示如下:
9.n=k(v+vb)
10.式中:
11.n为陀螺输出,单位为^
12.k为陀螺标度因数,单位为^/(
°
/s)
13.v为陀螺输入角速率,单位为
°
/s
14.vb为陀螺零偏,单位为
°
/s
15.目前光纤陀螺的标度因数的标定通过速率转台完成。测试原理框图如 图2所示。具体测试步骤如下:
16.1、陀螺仪通过安装夹具固定在速率转台上,转台轴平行于地垂线,陀 螺敏感轴平行于转台轴;
17.2、接通陀螺仪电源,陀螺预热后开始测试;
18.3、速率转台以角度率v1逆时钟匀速转动,记录陀螺仪的输出值n1,然 后停止转动;
19.4、速率转台以角度率v1顺时钟匀速转动,记录陀螺仪的输出值n2,然 后停止转动;
20.5、关闭陀螺电源,根据测试的输出值n1和n2,计算标度因数,具体计 算公式为:
21.22.但是上述陀螺仪标度因数标定方法必须依赖速率转台才能实施,当在 户外等没有速率转台的场景使用陀螺仪时,就无法实现在现场实时的对陀 螺仪标度因数进行标定,影响了工作效率。
技术实现要素:
23.为了解决现有陀螺仪标度因数标定方法在没有速率转台时无法实现的 问题,本发明提出了一种速率光纤陀螺仪标度因数标定方法。
24.本发明的基本设计思路是:
25.不需要速率转台,仅需要在一个平台上,通过操作人员手动顺时钟和 逆时钟转动陀螺仪整数圈,就能实现陀螺仪标度因数的标定。
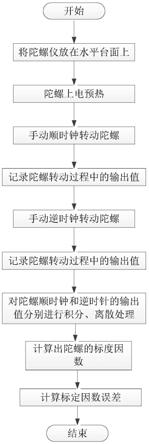
26.本发明的具体技术方案是:
27.一种速率光纤陀螺仪标度因数标定方法,包括以下步骤:
28.步骤1:将陀螺仪放在水平台面上,接通陀螺仪电源,进行预热;
29.步骤2:顺时钟手动转动陀螺仪整数圈,记录陀螺仪的输出值n
pi
;
30.步骤3:逆时钟手动转动陀螺仪旋转与步骤1相同的圈数,记录陀螺仪 的输出值n
nj
;
31.步骤4:将输出值n
pi
和输出值n
nj
分别进行积分、离散处理后做差,得 到表达式:
32.式中,θ为陀螺仪转动的角度值,单位为
°
33.n1为顺时钟手动转动陀螺仪在t1时间内输出数据的个数;
34.i=(1,2...n1);
35.n2为逆时钟手动转动陀螺仪在t2时间内输出数据的个数;
36.j=(1,2...n2);
37.t1为陀螺仪逆时针转动所用的时间,单位为s;
38.t2为陀螺仪顺时针转动所用的时间,单位为s;
39.δt为陀螺仪数据输出的周期,单位为s;
40.k为陀螺标度因数;
41.vb为陀螺零偏,单位为
°
/s;
42.步骤5:根据步骤4的表达式,计算陀螺仪的标度因数值;
43.由于t1≈t2,则步骤4的表达式转换为:
44.即而求解出陀螺仪的标度因数值。
45.进一步地,上述方法还包括步骤6:求解标定因数误差;
46.具体求解公式为:
[0047][0048]
进一步地,上述步骤4中对输出值n
pi
和输出值n
nj
进行积分后的表达式 分别为:
[0049]
进一步地,上述步骤4中输出值n
pi
和输出值n
nj
进行积分后再进行离散 处理的具体公式为:
[0050]
进一步地,上述步骤2和步骤3中陀螺仪转动的圈数≥10。
[0051]
本发明的有益效果在于:
[0052]
针对传统速率陀螺标度因数标定需要专用设备速率转台,提出了一种 新的标定方法,该方法不需要速率转台,只需要将陀螺放在水平面上,手 动顺时钟和逆时钟转动陀螺整圈,通过对速率的积分、离散处理后实现标 度因数的标定,实现简单,标定精度高,适应范围广。
附图说明
[0053]
图1为光纤陀螺仪结构原理图。
[0054]
图2为本发明标定方法的流程图。
具体实施方式
[0055]
针对目前光纤陀螺标度因数标定需要速率转台的情况,提出了一种新 的标度因数标定方法,该方法不需要速率转台,将陀螺仪放在水平台面 上,将陀螺仪敏感轴朝上,手动顺时钟转动陀螺仪整数圈,然后逆时钟转 动陀螺仪相同的圈数,通过对陀螺仪的输出进行积分,将角速率积分成角 度,利用角度实现陀螺标度因数的标定。
[0056]
具体实现过程图2所示:
[0057]
第一步,将陀螺仪放在水平台面上,将陀螺仪敏感轴朝上,接通陀螺 仪电源,进行预热,预热时间为3分钟;
[0058]
第二步,操作人员手动按照顺时钟将陀螺仪转动整数圈,记录本次转 动时陀螺仪的输出值n
pi
;
[0059]
第三步,操作人员手动按照逆时钟将陀螺仪转动与第二步相同的圈 数,记录本次转动时陀螺仪的输出值n
nj
;
[0060]
第四步,将陀螺仪的输出值n
pi
和输出值n
nj
分别进行积分和离散处理;
[0061]
对上述两个值采取积分和离散的过程均遵循以下公式(1)至(4):
[0062]
由于陀螺仪的输出值的计算公式为:
[0063]
n=k(v+vb)
……………………………
(1)
[0064]
对公式(1)进行积分后如下
[0065][0066]
然后对积分后的结果进行数字离散后表达式为:
[0067][0068]
公式(3)可以简化写成:
[0069][0070]
根据公式(1)至(4)进行处理后,实际输出值n
pi
和输出值n
nj
分别可 表示为:
[0071][0072][0073]
第五步,将上述公式(5)和(6)做差,计算出陀螺仪的标度因数值;
[0074][0075]
由于t1≈t2,则步骤4的表达式转换为:
[0076][0077]
通过公式(8)即可求解出陀螺仪的标度因数值;
[0078]
式中,θ为陀螺仪转动的角度值,单位为
°
[0079]
n1为顺时钟手动转动陀螺仪在t1时间内输出数据的个数;i=(1,2...n1);
[0080]
n2为逆时钟手动转动陀螺仪在t2时间内输出数据的个数;j=(1,2...n2);
[0081]
t1为陀螺仪逆时针转动所用的时间,单位为s;
[0082]
t2为陀螺仪顺时针转动所用的时间,单位为s;
[0083]
δt为陀螺仪数据输出的周期,单位为s;
[0084]
k为陀螺标度因数;
[0085]
vb为陀螺零偏,单位为
°
/s;
[0086]
第六步,断开陀螺电源,标定结束。
[0087]
在实际使用时,两次旋转的圈数虽然相同,但是t1和t2不可能完全相 等,因此本发明方法获得的标度因数存在标定误差,为了验证本发明的标 定误差对标定结果的影响。本发明还给出了以下验证方式:
[0088]
若t1≠t2,则会带来标定误差,可用公式表示为:
[0089][0090]
vb一般小于2%,(t1-t2)为顺时钟转动和逆时针转动相同圈数的时 间差,经过多次验证这个差值一般小于5s,θ为转动的角度,θ越大误差 越小,经分析当转动圈数不小于10圈时,标定误差将不大于20ppm。
[0091]
下面比较传统的标定方法与新标定方法标定的标度因数的结果。比较 结果如表1所示:
[0092]
表1两种方法标定结果对比
[0093][0094]
通过表1,以采用方法1标定的陀螺标度因数作为基准值,方法2相对 方法1的标定因数误差为:
[0095]
δk=(151255.435-151253.900)/151253.900*1000000=10.14ppm。
[0096]
陀螺的零偏vb=0.018,t1-t2=4,转10圈θ=3600,根据公式(9)计 算出方法2标定的标度因数误差δk≈0.018*4/(2*3600)*1000000=10ppm。
[0097]
通过试验数据对比可知本发明的标度因数标定方法是有效的,并且可 用公式(9)对标定的标度因数误差进行估算。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1