一种推土机载荷谱监测方法、装置、VCU及存储介质与流程
一种推土机载荷谱监测方法、装置、vcu及存储介质
技术领域
1.本发明实施例涉及推土机技术,尤其涉及一种推土机载荷谱监测方法、装置、vcu及存储介质。
背景技术:
2.推土机等土方工程机械产品是国家基础工程建设的重要机械设备,尤其大马力矿用液力传动推土机,工况环境十分恶劣,工作中存在很大的冲击载荷和不规律性的偶然载荷,这些冲击和偶然载荷会对推土机传动系统产生永久不可逆的损伤,对设计和质量工作提出了更高的要求。
3.现有技术中,驾驶人员在推土机工作过程中主要靠履带打滑、发动机声音、发动机转速下降等判断推土机的工作载荷,从而调整工作负荷,不能进行相对的定量控制。
技术实现要素:
4.本发明提供一种推土机载荷谱监测方法、装置、vcu及存储介质,以实现定性分析推土机载荷谱数据,从而精确地得到推土机载荷谱数据以指导驾驶人员进行更节能、高效的作业。
5.第一方面,本发明实施例提供了一种推土机载荷谱监测方法,该方法应用于推土机载荷谱监测系统,所述推土机载荷谱监测系统包括输入转速传感器、输出转速传感器、角度传感器及控制器;所述输入转速传感器用于采集液力变矩器的输入轴的转速信息;所述输出转速传感器用于采集所述液力变矩器的输出轴的转速信息;所述角度传感器用于采集整机的姿态信息;所述推土机载荷谱监测方法包括:
6.获取输入转速传感器采集的液力变距器的输入轴的转速信息;
7.获取输出转速传感器采集的液力变距器的输出轴的转速信息;
8.获取角度传感器采集的整机的姿态信息;
9.根据所述输入轴的转速信息、所述输出轴的转速信息及所述整机的姿态信息确定整机载荷谱。
10.可选的,根据所述输入轴的转速信息、所述输出轴的转速信息及所述整机的姿态信息确定整机载荷谱,包括:
11.根据所述输入轴的转速信息、所述输出轴的转速信息确定整机牵引载荷;
12.根据所述整机的姿态信息确定整机阻力载荷;
13.根据所述整机牵引载荷和所述整机阻力载荷确定整机载荷谱。
14.可选的,根据所述输入轴的转速信息、所述输出轴的转速信息确定整机牵引载荷,包括:
15.根据所述输入轴的转速信息、所述输出轴的转速信息确定所述液力变矩器的实时传动比;
16.根据所述实时传动比确定所述液力变矩器的变距比和所述液力变矩器的泵轮扭
矩;
17.根据所述变距比和所述泵轮扭矩确定所述液力变矩器的涡轮扭矩;
18.获取中央传动的驱动参数;
19.根据所述涡轮扭矩和所述驱动参数确定整机牵引载荷。
20.可选的,所述中央传动的驱动参数包括中央传动总减速比和驱动链轮节圆半径。
21.可选的,还包括:
22.将所述整机载荷谱通过gps模块发送至外部工厂终端。
23.可选的,还包括:
24.将所述整机载荷谱发送至本地显示模块。
25.第二方面,本发明实施例还提供了一种推土机载荷谱监测装置,该监测装置,包括:
26.第一转速信息获取模块:用于获取输入转速传感器采集的液力变距器的输入轴的转速信息;
27.第二转速信息获取模块,用于获取输出转速传感器采集的液力变距器的输出轴的转速信息;
28.姿态信息获取模块,用于获取角度传感器采集的整机的姿态信息;
29.整机载荷谱确定模块,用于根据所述输入轴的转速信息、所述输出轴的转速信息及所述整机的姿态信息确定整机载荷谱。
30.可选的,所述整机载荷谱确定模块包括:
31.整机牵引载荷单元,用于根据所述输入轴的转速信息、所述输出轴的转速信息确定整机牵引载荷;
32.整机阻力载荷确定单元,用于根据所述整机的姿态信息确定整机阻力载荷;
33.整机载荷谱确定单元,用于根据所述整机牵引载荷和所述整机阻力载荷确定整机载荷谱。
34.第三方面,本发明实施例还提供了一种推土机载荷谱监测系统,该监测系统包括输入转速传感器、输出转速传感器、角度传感器及控制器;
35.所述输入转速传感器用于采集液力变矩器的输入轴的转速信息;所述输出转速传感器用于采集所述液力变矩器的输出轴的转速信息;所述角度传感器用于采集整机的姿态信息;所述控制器用于用于实现如上述第一方面所述的推土机载荷谱监测方法。
36.第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如上述第一方面所述的推土机载荷谱监测方法。
37.本发明实施例,通过获取输入转速传感器采集的液力变距器的输入轴的转速信息;获取输出转速传感器采集的液力变距器的输出轴的转速信息;并获取角度传感器采集的整机的姿态信息;然后根据所述输入轴的转速信息、所述输出轴的转速信息及所述整机的姿态信息确定整机载荷谱,实现了定性分析推土机载荷谱数据,从而精确地得到推土机载荷谱数据以指导驾驶人员进行更节能、高效的作业。
附图说明
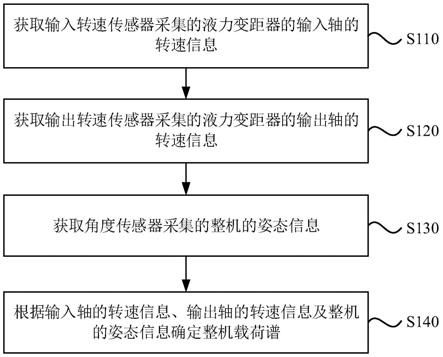
38.图1是本发明实施例提供的一种推土机载荷谱监测方法的流程图;
39.图2是本发明实施例提供的推土机载荷谱监测系统的结构框图;
40.图3是本发明实施例提供的另一种推土机载荷谱监测方法的流程图;
41.图4是本发明实施例提供的一种推土机载荷谱监测装置的结构框图。
具体实施方式
42.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
43.图1是本发明实施例提供的一种推土机载荷谱监测方法的流程图,本实施例可适用于推土机载荷谱确定情况,该方法可以由推土机载荷谱监测装置来执行,如图1所示,该监测方法具体包括如下步骤:
44.s110、获取输入转速传感器采集的液力变距器的输入轴的转速信息。
45.其中,图2是本发明实施例提供的推土机载荷谱监测系统的结构框图;如图2所示,推土机载荷谱监测系统包括推土机动力传递路线和外部监控平台;典型大马力推土机动力传递路线为发动机01提供动力传递至液力变矩器02,然后依次传递至变速箱03和中央传动04,中央传动04将动力从纵向传递转换为横向传递并分别传递至左右终传动05,终传动05驱动履带完成整机行走和转向等功能;其中发动机01为原动机,主要提供动力;液力变矩器02主要用液力柔性传递,减少冲击保护传动系统的同时,可以进行减速增扭;变速箱03主要实现整机速度的变化;中央传动04的主要作用是改变动力传递方向,通过转向和制动离合器进行整机的转向和制动控制;终传动05主要为轮边减速机构,用来进一步增加扭矩,保证推土机的合理行驶速度输出。
46.本方案中外部监测平台包括在大马力推土机液力变矩器动力输入和输出端分别安装输入转速传感器06、输出转速传感器07和控制器08,输入转速传感器06可以采集液力变矩器输入轴的转速信息;液力变矩器输入轴的转速信息即为发动机转速;输出转速传感器07可以采集液力变矩器输出轴的转速信息,液力变矩器输出轴的转速信息即变速箱输入转速;并同时将输入轴的转速信息和输出轴的转速信息发送至控制器08。
47.s120、获取输出转速传感器采集的液力变距器的输出轴的转速信息。
48.s130、获取角度传感器采集的整机的姿态信息。
49.其中,本方案中外部监测平台还包括在整机安装的角度传感器09;角度传感器采集整机纵向和横向的整机姿态数据,并同时将其发送至控制器08。
50.s140、根据输入轴的转速信息、输出轴的转速信息及整机的姿态信息确定整机载荷谱。
51.其中,控制器根据输入轴的转速信息、输出轴的转速信息确定整机牵引载荷;然后根据整机的姿态信息确定整机阻力载荷;然后根据整机牵引载荷和整机阻力载荷确定整机载荷谱,实现了定性分析推土机载荷谱数据,从而精确地得到推土机载荷谱数据以指导驾驶人员进行更节能、高效的作业。解决了现有技术中靠履带打滑、发动机声音、发动机转速下降等判断推土机的工作载荷,从而调整工作负荷,不能进行相对的定量控制等问题。
52.可选的,在上述实施例的基础上,进一步细化,图3是本发明实施例提供的另一种推土机载荷谱监测方法的流程图,如图3所示,该监测方法包括:
53.s210、获取输入转速传感器采集的液力变距器的输入轴的转速信息。
54.s211、获取输出转速传感器采集的液力变距器的输出轴的转速信息。
55.s212、获取角度传感器采集的整机的姿态信息。
56.s213、根据输入轴的转速信息、输出轴的转速信息确定液力变矩器的实时传动比。
57.s214、根据实时传动比确定液力变矩器的变距比和液力变矩器的泵轮扭矩。
58.s215、根据变距比和泵轮扭矩确定液力变矩器的涡轮扭矩。
59.s216、获取中央传动的驱动参数。
60.s217、根据涡轮扭矩和驱动参数确定整机牵引载荷。
61.其中,采集液力变矩器02的输入轴的转速信息(泵轮转速)nb,液力变矩器输出轴的转速信息(涡轮转速n
t
),则可以由输入轴的转速信息(泵轮转速)nb和输出轴的转速信息(涡轮转速n
t
)计算出液力变矩器的实时传动比i=n
t
/nb;
62.用高阶数学拟合将液力变矩器的实时传动比i和泵轮扭矩m
bg
拟合为以下多项式方程(1):
63.m
bg
=a1i5+b1i4+c1i3+d1i2+e1i+f1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
64.用高阶数学拟合将实时传动比i和液力变矩器的变矩比k拟合为以下多项式方程(2):
65.k=a2i5+b2i4+c2i3+d2i2+e2i+f2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
66.其中,a1、b1、c1、d1、e1、f1、a2、b2、c2、d2、e2、f2均为多项式拟合常数。
67.把变矩器的实时传动比i分别代入多项式方程(1)和(2),则可以计算出液力变矩器实时的泵轮扭矩m
bg
和变矩比k;
68.由变矩比k和泵轮扭矩m
bg
的乘积得到涡轮实时输出转矩m
t
,见公式(3):
69.m
t
=k*m
bg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
70.根据涡轮实时输出扭矩m
t
和驱动参数确定整机实时输出扭矩mk,见公式(4):
71.mk=m
t
·i总
/rkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
72.其中,驱动参数包括变速箱、中央传动、终传动总减速比i
总
和驱动链轮节圆半径rk。
73.则整机牵引载荷p
kρ
见公式(5);
[0074][0075]
其中,p
kp
为平整地面的整机牵引载荷;pk为整机理论牵引载荷;pf为地面滑转及自身摩擦等负载荷;η
μk
为液力变矩器的转化效率;mk为整机实时输出扭矩;rk为驱动链轮节圆半径。
[0076]
s218、根据整机的姿态信息确定整机阻力载荷。
[0077]
其中,角度传感器可以实时采集整机的姿态数据,在平整地面工作时,整机姿态对整机牵引载荷无影响,当在坡度工作时,上坡状态整机牵引载荷为p
kp
与整机重量坡度分量g
x
的和,下坡状态整机牵引载荷为p
kp
与整机重量坡度分量g
x
的差。
[0078]
s219、根据整机牵引载荷和整机阻力载荷确定整机载荷谱。
[0079]
其中,在平整地面工作时,由整机牵引载荷直接确定整机载荷谱;当在上坡度工作时,由整机牵引载荷为p
kp
与整机重量坡度分量g
x
的和确定整机载荷谱;当在下坡工作时,由整机牵引载荷为p
kp
与整机重量坡度分量g
x
的差确定整机载荷谱。
[0080]
s220、将整机载荷谱通过gps模块发送至外部工厂终端。
[0081]
其中,将载荷谱数据以t为时间间隔进行压缩打包通过gps模块传递至外部工厂终端,外部工厂终端数据分析形成各种不同工况载荷谱,以整机载荷谱为输入数据,进行传动总成、工作装置等部件的台架试验,为轻量化、耐久性设计提供数据支撑。
[0082]
s221、将整机载荷谱发送至本地显示模块。
[0083]
其中,将载荷谱数据发动至智能仪表等显示模块进行实时显示,这样基于实时显示的载荷谱数据,一方面驾驶人员可以根据载荷谱数据准确的切换发动机轻载、标准、重载等作业模式,实现节能降耗和智能辅助作业。另一方面也可以将载荷数据反馈至发动机控制器进行发动机预设模式的自动控制。本方案在上述实施例的基础上,进一步对输入轴的转速信息、输出轴的转速信息确定整机牵引载荷进行细化,并将根据整机牵引载荷和整机阻力载荷确定的整机载荷谱发送至外部工厂终端,为轻量化、耐久性设计提供了数据支撑,同时将整机载荷谱发送至本地显示模块实现了节能降耗和智能辅助作业。
[0084]
本发明实施例所提供还提供了一种推土机载荷谱监测装置,本发明实施例所提供的推土机载荷谱监测装置可执行本发明任意实施例所提供的推土机载荷谱监测方法,具备执行方法相应的功能模块和有益效果。图4是本发明实施例提供的一种推土机载荷谱监测装置的结构框图,如图4所示,该推土机载荷谱监测装置包括:
[0085]
第一转速信息获取模块10,用于获取输入转速传感器采集的液力变距器的输入轴的转速信息;
[0086]
第二转速信息获取模块20,用于获取输出转速传感器采集的液力变距器的输出轴的转速信息;
[0087]
姿态信息获取模块30,用于获取角度传感器采集的整机的姿态信息;
[0088]
整机载荷谱确定模块40,用于根据输入轴的转速信息、输出轴的转速信息及整机的姿态信息确定整机载荷谱。
[0089]
可选的,整机载荷谱确定模块40包括:
[0090]
整机牵引载荷单元,用于根据输入轴的转速信息、输出轴的转速信息确定整机牵引载荷;
[0091]
整机阻力载荷确定单元,用于根据整机的姿态信息确定整机阻力载荷;
[0092]
整机载荷谱确定单元,用于根据整机牵引载荷和整机阻力载荷确定整机载荷谱。
[0093]
本发明实施例还提供了一种vcu,该vcu包括控制器和存储器,vcu中控制器的数量可以是一个或多个;存储器作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序以及模块,如本发明实施例中的推土机载荷谱监测方法对应的程序指令/模块(例如,推土机载荷谱监测装置中的第一转速信息获取模块10、第二转速信息获取模块20、姿态信息获取模块30及整机载荷谱确定模块40)。控制器通过运行存储在存储器中的软件程序、指令以及模块,从而执行vcu的各种功能应用以及数据处理,即实现上述的推土机载荷谱监测方法。
[0094]
存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、
至少一个功能所需的应用程序;存储数据区可存储根据终端的使用所创建的数据等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实例中,存储器可进一步包括相对于控制器远程设置的存储器,这些远程存储器可以通过网络连接至vcu。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
[0095]
本发明实施例还提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行一种推土机载荷谱监测方法,该方法包括:
[0096]
获取输入转速传感器采集的液力变距器的输入轴的转速信息;
[0097]
获取输出转速传感器采集的液力变距器的输出轴的转速信息;
[0098]
获取角度传感器采集的整机的姿态信息;
[0099]
根据所述输入轴的转速信息、所述输出轴的转速信息及所述整机的姿态信息确定整机载荷谱。
[0100]
当然,本发明实施例所提供的一种包含计算机可执行指令的存储介质,其计算机可执行指令不限于如上所述的方法操作,还可以执行本发明任意实施例所提供的推土机载荷谱监测方法中的相关操作。
[0101]
通过以上关于实施方式的描述,所属领域的技术人员可以清楚地了解到,本发明可借助软件及必需的通用硬件来实现,当然也可以通过硬件实现,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如计算机的软盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、闪存(flash)、硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。
[0102]
值得注意的是,上述搜索装置的实施例中,所包括的各个单元和模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0103]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1