高精度三维螺纹测量机的制作方法
1.本发明涉及一种高精度三维螺纹测量机,用于螺纹测量。
背景技术:
2.在传统接触式扫描测量中,通过二轴直线运动加一个摆动轴构成的二维扫描采样,描绘出螺纹的二维图形,再计算出螺纹的大中小径及牙形角,可以通过手动更换工件或量规扫描不同截面,得到不同截面的螺纹的大中小径及牙形角。可见,上述的传统接触式扫描方法不能得到各截面的相对坐标关系,体现不出螺纹的三维空间形状。
技术实现要素:
3.本发明提供一种高精度三维螺纹测量机,以解决现有技术存在的上述问题。
4.本发明的技术方案是:一种高精度三维螺纹测量机,包括基座、测头和探头驱动机构,探头驱动机构安装在基座的上面,测头安装在探头驱动机构上;在该基座的上面装有用于夹持被测件的工作台;该测头的检测信号输出端通过数据电缆与处理系统连接,其特征在于,所述的探头驱动机构包括z轴移动组件、r轴移动组件和旋转组件,z轴移动组件的底端固定在基座的上面,水平设置的r轴移动组件的一端滑动连接在z轴移动组件上;在该r轴移动组件上滑动连接测头的顶端;在所述的基座上面安装旋转组件,在该旋转组件的顶端装有所述的工作台。
5.本发明的优点是:通过z轴移动组件和r高精度转轴直线运动及高精度转轴的旋转转动,z轴移动组件采集记录螺纹轴向坐标值,r轴移动组件采集记录螺纹径向坐标值,旋转组件采集记录螺纹不同截面角度坐标值,测头控制和补偿z轴坐标及r轴坐标值,建立圆柱坐标系。进行螺纹多条不同截面的扫描,在圆柱坐标系里描绘出各截面空间坐标,通过软件构建环塞量规三维测量模型,计算出螺纹的真实圆柱度、大中小径、牙形角及螺旋升角。
附图说明
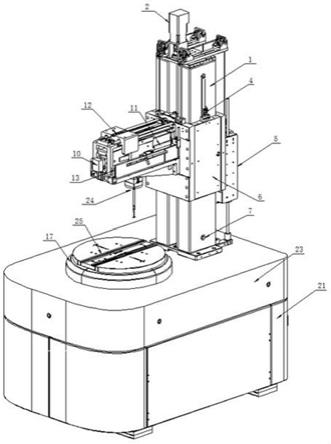
6.图1是本发明整体的立体结构示意图;图2是本发明的剖视图。
7.附图标记说明:1、z轴移动组件,2、z轴电机,3、z轴丝杆,4、z轴直线光栅,5、z轴平衡配重,6、z轴滑套,7、z轴大理石导轨,8、r轴气浮导轨,81、支架,9、r轴丝杆,10、r轴电机,11、r向直线光栅,12、r向平衡配重,13、r轴移动组件,14、r轴滑套,15、r轴驱动装置,16、z轴驱动装置,17、旋转组件,18、固定法兰,19、旋转电机,20、圆光栅角度编码器,21、底座,22、减振装置(气囊),23、大理石台面,24、测头,25、工作台,26、气浮旋转轴。
具体实施方式
8.参见图1和图2,本发明一种高精度三维螺纹测量机,包括基座、测头24和探头驱动机构,探头驱动机构安装在基座的上面,测头24安装在探头驱动机构上;在该基座的上面装
有用于夹持被测件的工作台25;该测头24的检测信号输出端通过数据电缆与处理系统连接,其特征在于,所述的探头驱动机构包括z轴移动组件1、r轴移动组件13和旋转组件17,z轴移动组件1的底端固定在基座的上面,水平设置的r轴移动组件13的一端滑动连接在z轴移动组件1上;在该r轴移动组件13上滑动连接测头24的顶端;在所述的基座上面安装旋转组件17,在该旋转组件17的顶端装有所述的工作台25。测头24为现有技术。
9.所述的z轴移动组件1包括z轴大理石导轨7、z轴滑套6、z轴驱动装置、z轴直线光栅4和z轴平衡配重5,z轴大理石导轨7的底端固定在该基座的上面,z轴滑套6滑动安装在z轴大理石导轨7上,该z轴滑套6的上端通过配重绳与z轴平衡配重5的顶端连接,该配重绳支撑在两个分别安装在z轴大理石导轨7两侧并具有相同高度的滑轮上;在该z轴大理石导轨7的顶端装有用于驱动该z轴滑套6沿着z轴大理石导轨7移动的z轴驱动装置;在该z轴大理石导轨7的一侧装有z轴直线光栅4,该z轴直线光栅4用于采集被测件的被扫描表面的z向坐标,z轴直线光栅4的信号输出端与所述的处理系统连接。z轴平衡配重5能够提高z轴滑套6的行走平稳性。
10.所述的z轴驱动装置包括z轴电机2和z轴丝杆3,z轴电机2安装在该z轴大理石导轨7的顶端;该z轴丝杆3安装在z轴大理石导轨7的凹槽内,z轴丝杆3的顶端与z轴电机2的输出轴同轴连接;在该z轴丝杆3上装有螺母,所述的z轴滑套6与该螺母连接。
11.所述的r轴移动组件13包括r轴气浮导轨8、r轴滑套14和r轴驱动装置,水平设置的r轴气浮导轨8一端通过支架81固定在所述的z轴滑套6上,在该r轴气浮导轨8上滑动安装r轴滑套14,所述的测头24安装在r轴滑套14的下面;在该r轴气浮导轨8另一端的支架81上装有用于驱动r轴滑套14沿着该r轴气浮导轨8移动的r轴驱动装置;在该r轴气浮导轨8上装有r向直线光栅11。r轴直线光栅11用于采集被扫描表面的r坐标(被测工件或量规螺纹直径方向),r轴直线光栅11的信号输出端与所述的处理系统连接。
12.所述的r轴驱动装置包括r轴丝杆9和r轴电机10,r轴电机10安装在该r轴气浮导轨8的另一端,r轴丝杆9转动安装在该r轴导轨13的水平凹槽内,该r轴丝杆9一端与该r轴电机10的输出轴同轴连接;在该r轴丝杆9上装有螺母,所述的r轴滑套14与该螺母连接。电机10 驱动r轴丝杆9转动,从而带动螺母和r轴滑套14左右移动。
13.在所述r轴滑套14的上方装有用于恒定r轴移动组件13重心的r向平衡配重12,该r轴平衡配重12连接在环形带上,该环形带环绕支撑在两个安装在相同高度的带轮之间,该带轮转动安装在该支架81的上面;该r轴平衡配重12和r轴滑套14分别连接在该环形带的上端和下端。
14.所述的基座包括底座21、大理石台面23和减振装置22(如气囊),大理石台面23设在底座21的上面,在大理石台面23与底座21之间装有减振装置22;在该大理石台面23的中部设有用于安装旋转组件17的安装孔。通过减振装置22隔离环境振动对测量的影响。
15.所述的旋转组件17包括固定法兰18、旋转电机19、气浮旋转轴26和圆光栅角度编码器20,圆筒状的固定法兰18安装在大理石台面23的安装孔内,气浮旋转轴26转动安装在该固定法兰18内,所述工作台25的底面安装于气浮旋转轴26的顶端;该气浮旋转轴26的底端与旋转电机19的转子同轴连接;在面对该转子下面的电机端盖上装有圆光栅角度编码器20,用于采集被测件的角度值。
16.本发明通过z轴移动组件1和r轴移动组件 13带动测头24的z、r二轴直线运动,以
及通过旋转组件17带动工作台25旋转,建立圆柱坐标系,实现被测件的螺纹不同截面的扫描,描绘出各截面在圆柱坐标系里,通过软件(为现有技术)构建环塞量规三维测量模型。
17.本发明的r轴移动组件13中的z轴大理石导轨7可以采用高精度直线导轨代替;气浮旋转轴26可以用密珠转轴代替。
技术特征:
1.一种高精度三维螺纹测量机,包括基座、测头(24)和探头驱动机构,探头驱动机构安装在基座的上面,测头(24)安装在探头驱动机构上;在该基座的上面装有用于夹持被测件的工作台(25);该测头(24)的检测信号输出端通过数据电缆与处理系统连接,其特征在于,所述的探头驱动机构包括z轴移动组件(1)、r轴移动组件(13)和旋转组件(17),z轴移动组件(1)的底端固定在基座的上面,水平设置的r轴移动组件(13)的一端滑动连接在z轴移动组件(1)上;在该r轴移动组件(13)上滑动连接测头(24)的顶端;在所述的基座上面安装旋转组件(17),在该旋转组件(17)的顶端装有所述的工作台(25)。2.根据权利要求1所述的高精度三维螺纹测量机,其特征在于,所述的z轴移动组件(1)包括z轴大理石导轨(7)、z轴滑套(6)、z轴驱动装置、z轴直线光栅(4)和z轴平衡配重(5),z轴大理石导轨(7)的底端固定在该基座的上面,z轴滑套(6)滑动安装在z轴大理石导轨(7)上,该z轴滑套(6)的上端通过配重绳与z轴平衡配重(5)的顶端连接,该配重绳支撑在两个分别安装在z轴大理石导轨(7)两侧并具有相同高度的滑轮上;在该z轴大理石导轨(7)的顶端装有用于驱动该z轴滑套(6)沿着z轴大理石导轨(7)移动的z轴驱动装置;在该z轴大理石导轨(7)的一侧装有z轴直线光栅(4),该z轴直线光栅(4)用于采集被测件的被扫描表面的z向坐标,并与所述的处理系统连接。3.根据权利要求2所述的高精度三维螺纹测量机,其特征在于,所述的z轴驱动装置包括z轴电机(2)和z轴丝杆(3),z轴电机(2)安装在该z轴大理石导轨(7)的顶端;该z轴丝杆(3)安装在z轴大理石导轨(7)的凹槽内,z轴丝杆(3)的顶端与z轴电机(2)的输出轴同轴连接;在该z轴丝杆(3)上装有螺母,所述的z轴滑套(6)与该螺母连接。4.根据权利要求1所述的高精度三维螺纹测量机,其特征在于,所述的r轴移动组件 (13) 包括r轴气浮导轨(8)、r轴滑套(14)和r轴驱动装置,水平设置的r轴气浮导轨(8)一端通过支架(81)固定在所述的z轴滑套(6)上,在该r轴气浮导轨(8)上滑动安装r轴滑套(14),所述的测头(24)安装在r轴滑套(14)的下面;在该r轴气浮导轨(8)另一端的支架(81)上装有用于驱动r轴滑套(14)沿着该r轴气浮导轨(8)移动的r轴驱动装置;在该r轴气浮导轨(8)上装有r向直线光栅(11),用于采集被测工件的r坐标,并与所述的处理系统连接。5.根据权利要求4所述的高精度三维螺纹测量机,其特征在于,所述的r轴驱动装置包括r轴丝杆(9)和r轴电机(10),r轴电机(10)安装在该r轴气浮导轨(8)的另一端,r轴丝杆(9)转动安装在该r轴导轨(13)的水平凹槽内,该r轴丝杆(9)一端与该r轴电机(10)的输出轴同轴连接;在该r轴丝杆(9)上装有螺母,所述的r轴滑套(14)与该螺母连接。6.根据权利要求4所述的高精度三维螺纹测量机,其特征在于,在所述r轴滑套(14)的上方装有用于恒定r轴移动组件(13)重心的r向平衡配重(12),该r轴平衡配重(12)连接在环形带上,该环形带环绕支撑在两个安装在相同高度的带轮之间,该带轮转动安装在该支架(81)的上面;该r轴平衡配重(12)和r轴滑套(14)分别连接在该环形带的上端和下端。7.根据权利要求1所述的高精度三维螺纹测量机,其特征在于,所述的基座包括底座(21)、大理石台面(23)和减振装置(22),大理石台面(23)设在底座(21)的上面,在大理石台面(23)与底座(21)之间装有减振装置(22);在该大理石台面(23)的中部设有用于安装旋转组件(17)的安装孔。8.根据权利要求7所述的高精度三维螺纹测量机,其特征在于,所述的旋转组件(17)包括固定法兰(18)、旋转电机(19)、气浮旋转轴(26)和圆光栅角度编码器(20),圆筒状的固定
法兰(18)安装在大理石台面(23)的安装孔内,气浮旋转轴(26)转动安装在该固定法兰(18)内,所述工作台(25)的底面安装于气浮旋转轴(26)的顶端;该气浮旋转轴(26)的底端与旋转电机(19)的转子同轴连接;在面对该转子下面的电机端盖上装有圆光栅角度编码器(20),用于采集被测件的角度值。
技术总结
一种高精度三维螺纹测量机,包括基座、测头和探头驱动机构,探头驱动机构安装在基座的上面,测头安装在探头驱动机构上;在基座的上面装有用于夹持被测件的工作台;测头的检测信号输出端与处理系统连接。该探头驱动机构包括Z轴移动组件、R轴移动组件和旋转组件,Z轴移动组件的底端固定在基座的上面,水平设置的R轴移动组件的一端滑动连接在Z轴移动组件上;在该R轴移动组件上滑动连接测头的顶端;在所述的基座上面安装旋转组件,在该旋转组件的顶端装有所述的工作台。优点是:通过二轴直线运动,高精度转旋轴的旋转,建立圆柱坐标系,能够计算出螺纹的真实圆柱度、大中小径、牙形角及螺旋升角。通过二维扫描测头能够建立三维高精度数学模型。数学模型。数学模型。
技术研发人员:邹功文 张鹏 张达民 朱小平 杜华
受保护的技术使用者:深圳市中图仪器股份有限公司
技术研发日:2021.12.13
技术公布日:2022/2/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1