一种海底振动信号测量装置和测量方法
1.本发明属于光纤光栅传感监测技术领域,具体涉及一种海底振动信号测量装置和测量方法。
背景技术:
2.传统的加速度传感器从原理上一般为电磁类,包括压电、磁电、电容式等电类传感器。但由于电类传感器存在传输距离近、易受电磁干扰、不易于分布式测量等缺点,使得它们在应用上受到限制,无法适应多种复杂的场合。光纤传感作为新型传感技术中的一种光纤传感器具有灵敏度高、抗电磁干扰、动态范围宽、体积小、重量轻、耐腐蚀、易于网络化和分布式检测等诸多优点。
3.传统的悬臂梁式结构的fbg加速度传感器,光栅全粘贴在悬臂梁上容易使光栅产生啁啾,对加速度的测量会存在一定的横向干扰。目前市场上常见的fbg三维加速度传感器多为一体式结构或在一个平面内的两个垂直方向设计成一体式,制造成本高。抛投式的监测仪器不能够精确求解出矢量加速度。
技术实现要素:
4.本发明要解决的技术问题是:提供一种海底振动信号测量装置和测量方法,用于实现在复杂场合准确采集振动信号并通过远距离传输振动信号的功能。
5.本发明为解决上述技术问题所采取的技术方案为:一种海底振动信号测量装置,包括低频fbg三维加速度传感器、光纤光栅陀螺仪和解调仪;低频fbg三维加速度传感器包括x向加速度传感单元、y向加速度传感单元和z向加速度传感单元;设x、y、z为三个相互垂直的方向,则在低频环境下,z向加速度传感单元用于测量z轴方向的振动信号,y向加速度传感单元用于测量y轴方向的振动信号,x向加速度传感单元用于测量x轴方向的振动信号;x向加速度传感单元、y向加速度传感单元和z向加速度传感单元分别包括相同结构的金属传感芯体和不同波长的fbg光纤布拉格光栅;金属传感芯体为柔性双绞链式结构,包括依次连接的基座、双绞链结构和芯体质量块,基座上设有螺纹孔;fbg光纤布拉格光栅按金属传感芯体的长度方向固定在金属传感芯体上;光纤光栅陀螺仪敏感的三轴方向分别与低频fbg三维加速度传感器敏感的三轴方向平行,光纤光栅陀螺仪用于实时测量整个装置的姿态角,并根据姿态角用算法将低频fbg三维加速度传感器确定的第一坐标系矫正到大地坐标系;低频fbg三维加速度传感器和光纤光栅陀螺仪分别通过各自的尾纤连接解调仪的不同输入通道的跳线,解调仪用于分别解调低频fbg三维加速度传感器的信号和光纤光栅陀螺仪的光信号并储存测量数据。
6.按上述方案,金属传感芯体包括相同结构的z向金属传感芯体、y向金属传感芯体和x向金属传感芯体;fbg光纤布拉格光栅包括不同波长的fbg1第一光纤布拉格光栅、fbg2第二光纤布拉格光栅、fbg3第三光纤布拉格光栅;x向加速度传感单元包括x向金属传感芯体和固定在x向金属传感芯体上的fbg3第三光纤布拉格光栅;y向加速度传感单元包括y向
金属传感芯体和固定在y向金属传感芯体上的fbg2第二光纤布拉格光栅;z向加速度传感单元包括z向金属传感芯体和固定在z向金属传感芯体上的fbg1第一光纤布拉格光栅;fbg光纤布拉格光栅在固定的过程中使栅区悬空不与金属传感芯体接触,并给光纤足够的预拉伸;z向金属传感芯体与x向金属传感芯体位于同一平面且相互垂直;y向金属传感芯体与z向金属传感芯体、x向金属传感芯体所在平面垂直;z向金属传感芯体、y向金属传感芯体和x向金属传感芯体两两相互垂直,构成空间三维坐标系,设为第一坐标系;fbg1第一光纤布拉格光栅、fbg2第二光纤布拉格光栅、fbg3第三光纤布拉格光栅的尾纤依次连接,fbg3第三光纤布拉格光栅的尾纤连接解调仪。
7.进一步的,x向金属传感芯体和z向传感金属芯体留有螺纹孔的一端为45度斜角。
8.按上述方案,低频fbg三维加速度传感器还包括底座,底座设有与金属传感芯体匹配的内螺纹,用于可拆卸式固定金属传感芯体。
9.按上述方案,还包括锂电池;锂电池为锂电池组;锂电池的电源输出端连接解调仪的电源输入端,用于为解调仪供电,使解调仪至少连续工作一个月。
10.进一步的,还包括承压保护壳、隔板和质量块;承压保护壳的内部用隔板分为由上而下的三层;第一层与第二层之间的隔板上设置有分别用于固定低频fbg三维加速度传感器、光纤光栅陀螺仪和解调仪的安装螺纹孔,第一层用于从左到右依次固定低频fbg三维加速度传感器、光纤光栅陀螺仪和解调仪;第二层用于固定锂电池;第三层用于固定质量块;质量块为高密度质量块,用于根据锂电池的重量对海底振动信号测量装置进行配重,使海底振动信号测量装置的重心处在中心线上并降低重心。
11.进一步的,承压保护外壳采用聚乙烯材料,承受不少于500米海深的压强;承压保护外壳的表面通过涂敷防水材料进行防水密封处理。
12.按上述方案,标准件装配过程中采用螺纹胶粘接固定;光纤熔接处采用热缩管保护;固定光纤光栅的胶水采用环氧树脂胶。
13.一种基于海底振动信号测量装置的测量方法,包括以下步骤:
14.s1:采取多节点海底布网,在每个节点将海底振动信号测量装置抛下海放置在深海的海底进行离线测量工作,获取一片区域海底振动信号;
15.s2:低频fbg三维加速度传感器的质量块根据海底振动信号的作用发生共振采集三个两两相互垂直的矢量方向上的振动信号,通过测量波长漂移量确定加速度,将三个方向的加速度矢量求和得出空间立体坐标系下的实际加速度;
16.s3:光纤光栅陀螺仪根据海底振动信号测量装置的姿态实时测量姿态角;利用计算机将低频fbg三维加速度传感器坐标系转化到光纤光栅陀螺仪确定的坐标系,从而确定矢量求和的加速度方向;
17.s4:定时打捞海底振动信号测量装置取出海底,导出储存的数据、更换锂电池;
18.s5:对数据进行分析计算,反演海底振动信号测量装置所在节点的环境情况。
19.进一步的,所述的步骤s3中,坐标矫正的具体步骤为:
20.设为由坐标系a转变到坐标系b的坐标变换矩阵,将三维坐标系x0y0z0绕z0轴逆时针旋转ψ得到坐标系x1y1z1,则坐标变换矩阵为:
21.cosψ sinψ 0
[0022][0023]
0 0 1;
[0024]
将三维坐标系x1y1z1绕x1轴逆时针旋转θ得到坐标系x2y2z2,则坐标变换矩阵为:
[0025]
1 0 0
[0026]0ꢀ‑
sinθ cosθ;
[0027]
将三维坐标系x2y2z2绕y2轴逆时针旋转γ得到坐标系x3y3z3,则坐标变换矩阵为:
[0028]
cosγ 0
ꢀ‑
sinγ
[0029][0030]
sinγ 0 cosγ;
[0031]
则三次旋转的坐标转换矩阵为:
[0032][0033]
本发明的有益效果为:
[0034]
1.本发明的一种海底振动信号测量装置和测量方法,采用低频fbg三维加速度传感器测量海底振动信号,利用光纤光栅陀螺仪矫正低频fbg三维加速度传感器的测量方向,实现了在复杂场合准确采集振动信号并通过远距离传输振动信号的功能。
[0035]
2.本发明的低频fbg三维加速度传感器采用双绞链结构,避免了出现啁啾现象,提高了横向抗干扰能力,使整个传感器精准地测量低频振动信号;低频fbg三维加速度传感器为三个独立传感单元组合而成,具有低频高灵敏度的特性,结构简单,便于批量生产和降低成本;低频fbg三维加速度传感器灵敏度高、线性度好、精度高,具有较强的抗干扰能力。
[0036]
3.本发明基于光纤光栅陀螺仪实时测量装置的姿态角,通过特定算法矫正低频fbg三维加速度传感器的坐标系,从而精确测量加速度方向;本发明在海底滑坡改变装置姿态的情况下基于光纤光栅陀螺仪时刻更新姿态角的信息,从而更加精确地获取振动信号。
[0037]
4.本发明以抛投的方式放置在海底节点,通过离线方式获取海底振动信号,将监测的数据存储在解调仪内;本发明采用锂电池保证装置在海底长时间工作,定时人工更换锂电池并导出监测数据,根据监测的数据反演海底振动实况,结构简单、易于制造、系统成本底。
[0038]
5.本发明的配重层用于降低重心且使重心保持在整个装置的中心线上,使装置在降落时始终保持配重层在下,重心在下,使装置保持良好的落地姿态。
附图说明
[0039]
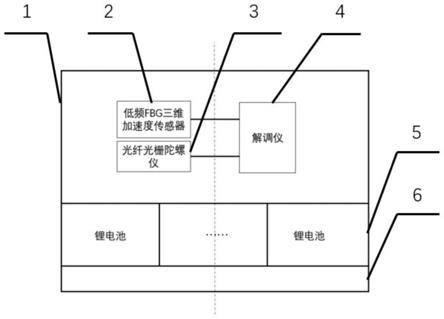
图1是本发明实施例的原理框图。
[0040]
图2是本发明实施例的低频fbg三维加速度传感器的结构图。
[0041]
图3是本发明实施例的金属传感芯体的结构图。
[0042]
图4是本发明实施例的光纤光栅陀螺仪的测量姿态角图。
[0043]
图中:1.承压保护壳;2.低频fbg三维加速度传感器;3.光纤光栅陀螺仪;4.双通道
解调仪;5.锂电池;6.质量块;21.底座;22.z向金属传感芯体;23.fbg1第一光纤布拉格光栅;24.fbg2第二光纤布拉格光栅;25.y向金属传感芯体;26.fbg3第三光纤布拉格光栅;27.x向金属传感芯体;221.螺纹孔;222.基座;223.双绞链结构;224.芯体质量块。
具体实施方式
[0044]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0045]
参见图1,本发明实施例的一种海底振动信号测量装置包括承压保护壳1、低频fbg三维加速度传感器2、光纤光栅陀螺仪3、双通道解调仪4、锂电池5和质量块6。
[0046]
承压保护壳1的内部用隔板分为由上而下的三层;第一层和第二层之间的隔板上设置有分别用于固定低频fbg三维加速度传感器2、光纤光栅陀螺仪3和双通道解调仪4的安装螺纹孔,第一层用于从左到右依次放置低频fbg三维加速度传感器2、光纤光栅陀螺仪3和双通道解调仪4;第二层用于放置锂电池5;第三层用于放置质量块6。承压保护外壳1采用聚乙烯材料,用于保护内部结构,承受不少于500米海深的压强,承压能力强,密封性好,适用于在深海的海底长期工作;由于整个装置在海底长期工作,整个设备在装配完成后在装置表面涂敷一层防水材料以保证密封性。
[0047]
参见图2,低频fbg三维加速度传感器2为包括x向加速度传感单元、y向加速度传感单元、z向加速度传感单元的三个独立传感单元的组合;x向加速度传感单元、y向加速度传感单元、z向加速度传感单元分别用于在低频环境下对应测量x、y、z三个相互垂直方向的振动信号,分别包括相同结构的金属传感芯体和不同波长的fbg光纤布拉格光栅;金属传感芯体用于固定fbg光纤布拉格光栅并预留合适长度的尾纤。
[0048]
金属传感芯体包括相同结构的z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27。参见图3,金属传感芯体为柔性双绞链式结构,包括依次连接的基座222、双绞链结构223和芯体质量块224,且基座222上设有螺纹孔221;x向金属传感芯体27和z向传感金属芯体22留有螺纹孔221的一端为45度斜角。
[0049]
铰链结构是悬臂梁的一种演变结构,只对一个方向的振动敏感;z向金属传感芯体22与x向金属传感芯体27位于同一平面且相互垂直;y向金属传感芯体25与z向金属传感芯体22、x向金属传感芯体27所在平面垂直;z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27两两相互垂直,构成空间三维坐标系,设为第一坐标系;z向金属传感芯体22用于测量z轴方向的振动信号,y向金属传感芯体25用于测量y轴方向的振动信号,x向金属传感芯体27用于测量x轴方向的振动信号。
[0050]
fbg光纤布拉格光栅包括不同波长的fbg1第一光纤布拉格光栅23、fbg2第二光纤布拉格光栅24、fbg3第三光纤布拉格光栅26,用焊接机分别配置焊接固定在z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27上;固定fbg光纤布拉格光栅的时候,使栅区悬空不与金属传感芯体接触,并给光纤足够的预拉伸;按照z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27的顺序将fbg1第一光纤布拉格光栅23、fbg2第二光纤布拉格光栅24、fbg3第三光纤布拉格光栅26的尾纤依次用熔接机焊接起来,并预留fbg3第三光纤布拉格光栅26的尾纤用于与双通道解调仪4连接。
[0051]
低频fbg三维加速度传感器2还包括底座21,底座21设有与金属传感芯体匹配的内螺纹,用于通过螺栓固定金属传感芯体。
[0052]
光纤光栅陀螺仪3与低频fbg三维加速度传感器2平行放置在承压保护壳1的第一层,用于实时测量整个装置的姿态角,并根据姿态角利用算法将低频fbg三维加速度传感器2确定的第一坐标系矫正到大地坐标系。
[0053]
双通道解调仪4的通道一和通道二分别用跳线连接低频fbg三维加速度传感器2的尾纤和光纤光栅陀螺仪3,用于分别解调低频fbg三维加速度传感器2的信号和光纤光栅陀螺仪3的光信号,并储存测量数据。
[0054]
锂电池5为锂电池组,锂电池5的电源输出端连接双通道解调仪4的电源输入端,用于为双通道解调仪4供电,使整个装置至少在海底连续工作一个月。
[0055]
质量块6为固定在本发明实施例底部的高密度质量块,用于根据锂电池5的重量对整个装置进行配重,使重心处在装置的中心线上并降低整个装置的重心,使重心处在合理位置。
[0056]
装置所有的螺纹配合用螺纹胶固定;光纤熔接处采用热缩管保护;固定光纤光栅的胶水采用环氧树脂胶。
[0057]
本发明实施例的一种坐标矫正方法,具体步骤为:
[0058]
s1:将装置抛下海底,整个传感装置放置在深海的海底工作,采取多节点海底布网用于获取一片区域海底振动信号;
[0059]
s2:海底的振动信号作用在整个传感装置上,传感器里的质量块同时发生共振,低频fbg三维加速度传感器能够精确地测量三个矢量方向上的振动信号,加速度与波长漂移的基本成线性变化,通过测量波长漂移量可以确定加速度,将三个方向的加速度矢量求和得出空间立体坐标下的实际加速度;
[0060]
s3:光纤光栅陀螺仪测量装置的姿态角,利用计算机将低频fbg三维加速度传感器坐标系转化到光纤光栅陀螺仪确定的坐标系上,确定矢量求和的加速度方向,且陀螺仪根据整个装置姿态的改变而实时测量姿态角,避免海底滑坡改变装置姿态影响监测质量;
[0061]
参见图4,坐标矫正方法为:将三维坐标系x0y0z0绕z0轴逆时针旋转ψ得到坐标系x1y1z1;将x1y1z1绕x1轴旋转θ得到坐标系x2y2z2;将坐标系x2y2z2绕y2轴旋转γ得到坐标系x3y3z3。设为由坐标系a转变到坐标系b的坐标变换矩阵,则由坐标系矫正算法分别得到坐标变换矩阵如下:
[0062]
cosψ sinψ 0
[0063][0064]
0 0 1,
[0065]
1 0 0
[0066][0067]0ꢀ‑
sinθcosθ,
[0068]
cosγ 0
ꢀ‑
sinγ
[0069]
sinγ 0 cosγ,
[0070][0071]
s4:整个装置为离线测量,定时打捞取出海底,导出储存的数据、更换锂电池,降低成本;
[0072]
s5:对数据进行分析计算,反演此节点的环境。
[0073]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1