洞室不稳定体监测的三维激光扫描系统及方法
1.本发明涉及三维激光扫描系统,尤其涉及一种洞室不稳定体监测的三维激光扫描系统及方法。
背景技术:
2.洞室是水利、市政等工程中的常见工程结构类型,洞室开挖后,临空面岩体失去支撑使洞室产生形变,当岩体破碎或存在不利结构面组合时,部分不稳定块体将产生大变形,到达一定程度会从洞室表面脱落,具有极大的安全隐患,尤其是当洞室开挖到一定高度、临空面较大时更为危险,因此需要准确获取洞室形态数据,对可能发生的不稳定体脱落及时预警。
3.目前工程上通常使用收敛计,配合全站仪、棱镜等对洞室进行监测,但当洞室较大时,在施工期很难固定工程基点,操作相当困难。近来年,逐渐尝试采用三维立体图像对洞室变形进行监测,常规手段有摄影测量、三维激光扫描和结构光技术,通过采用移动式的装置对洞室进行分次扫描,以固定基准点(靶点)配准的方法对不同批次的数据进行分析,但由于采集的数据量过于庞大,计算模型和数据匹配过程非常繁杂,难以快速得到高精度的监测结果,无法及时发现隐患并预警,影响其使用范围。
4.与此同时,洞室表面因开挖爆破,使得洞室表面凹凸不平,难以获取准确的表面形态数据进行后续的分析和处理。此外,洞室内部存在光线黑暗、爆破振动、灰尘较大等问题,使常规的三维激光扫描、摄影测量、结构光技术受到限制。
5.目前,亟待解决以上问题。
技术实现要素:
6.发明目的:本发明的第一目的在于提出一种洞室不稳定体监测的三维激光扫描系统,该激光扫描系统可对洞室余震进行有效减震,同时还能保障每次监测处于同一基准位置。
7.本发明的第二目的是提供该洞室不稳定体监测的三维激光扫描系统的安装方法。
8.本发明的第三目的是提供该洞室不稳定体监测的三维激光扫描系统的扫描方法,该扫描方法针对洞室在爆破开挖后、衬砌完成前洞室表面形变较大的阶段,在洞室两侧固定位置安装三维激光扫描仪,对洞室开挖断面进行双角度测量,解决监测盲区以及视线与洞室表面小角度相交引起的误差问题。
9.技术方案:为实现以上目的,本发明公开了一种洞室不稳定体监测的三维激光扫描系统,包括底座、位于底座上表面的三维激光扫描仪、位于底座下表面和侧面上且用于连接洞室内壁的弹性减震组件、位于底座下表面的上对中块、位于洞室内壁且与上对中块相对应的下对中块、一端与底座相连且另一端通过第一弹簧与洞室内壁相连的软带以及与三维激光扫描仪相连的控制单元;非监测状态下,第一弹簧和软带处于松弛状态,上对中块和下对中块相脱离,弹性减震组件支撑底座;监测状态下,第一弹簧和软带处于拉紧状态,上
对中块和下对中块相卡合对中。
10.其中,所述弹性减震组件包括相互连接的阻尼器和第二弹簧,其中第二弹簧的劲度系数小于第一弹簧的劲度系数。
11.优选的,所述上对中块上设置有圆锥形凸起,下对中块上设置有相对应的凹槽;或者上对中块上设置有圆锥形凹槽,下对中块上设置有相对应的凸起。
12.再者,所述底座上对称设置有转轮以及驱动转轮转动的转轮电机,软带的一端绕设有转轮上,转轮电机与控制单元相连接,控制单元控制转轮电机驱动转轮正反转,带动软带拉紧或放松。
13.进一步,所述控制单元包括带一侧开口且用于封装的保护盒以及位于保护盒内的控制芯片、无线通信模块和电源模块。
14.优选的,所述洞室内壁上开挖有壁槽,该壁槽高度大于安装后三维激光扫描仪顶高。
15.再者,所述壁槽口设置有与控制单元相连接的自动防尘门。
16.本发明一种洞室不稳定体监测的三维激光扫描系统的安装方法,包括如下步骤:
17.仪器定址:根据洞室洞径、开挖高度的不同,沿洞室轴线方向在洞室两侧选取相对应的洞室侧壁安装位置,其中,轴线方向相邻洞室侧壁安装位置之间小于50m;
18.壁槽开挖及底座安装:在洞室侧壁安装位置处开挖壁槽并安装三维激光扫描系统,正确安装状态为:上对中块和下对中块相卡合对中时,弹性减震组件处于压缩状态;上对中块和下对中块相脱离时,弹性减震组件支撑底座;
19.防尘门及控制线路连接:将自动防尘门安装于壁槽洞口,将自动防尘门和转轮电机的控制线路接至控制芯片;
20.监测状态:数据采集时,控制芯片分别向自动防尘门和转轮电机发送控制信号,自动防尘门打开,转轮由转轮电机带动随脉冲信号转动,拉紧软带和第一弹簧,使底座整体下移,直至上对中块和下对中块相卡合对中,使三维激光扫描仪每次监测时处于同一基准位置;
21.非监测状态:数据采集完成后,控制芯片分别向自动防尘门和转轮电机发送控制信号,自动防尘门关闭,转轮由转轮电机带动随脉冲信号转动,松开软带和第一弹簧,使底座整体上移,上对中块和下对中块相脱离,由底座下部和侧面的弹性减震组件支撑底座。
22.本发明一种洞室不稳定体监测的三维激光扫描系统的扫描方法,包括如下步骤:
23.数据分区初配准:洞室两侧固定位置安装有相对应的三维激光扫描系统,三维激光扫描系统进入扫描状态进行初次数据采集,由无线通信模块将数据传输至外部处理系统,将洞室表面点云数据进行区域划分并标记角度方位,存储两侧仪器对于同一区域的角度方位初始配准结果;
24.数据分析及验证:监测数据分析时,以单侧仪器采集的整体数据快速进行分析,得到每个分区的变形结果,并根据初始配准结果采用另一侧数据进行补充验证,若两侧数据分析结果差值不超过阈值,则取均值作为分区变形量输出;若差值超过阈值,则将两侧数据进行融合并分析,查找数据空洞,合并冗余数据,再计算区域变形结果;
25.变形计算和预警:根据监测需求设置数据采集的时间间隔,根据当前测量和前一次测量结果计算各分区的洞室变形量,查找洞室表面的大位移不稳定体位置,当某一分区
变形量超过预设值则进行预警。
26.有益效果:与现有技术相比,本发明具有以下显著优点:
27.(1)针对洞室爆破特殊环境,利用减震设计减少余震对于三维激光扫描仪的干扰,同时,减震对中装置保障三维激光扫描仪监测状态时处于同一基准位置,非监测状态时处于自由振动状态,保证监测精度和仪器的安全;
28.(2)利用无线通信技术实时传输监测数据,对洞室表面的不稳定体进行监控,满足了工程施工期洞室表面形态的高精度数据采集及不稳定体脱落预报需求;
29.(3)针对洞室在爆破开挖后、衬砌完成前洞室表面形变较大的阶段,在洞室两侧固定位置安装三维激光扫描仪,对洞室开挖断面进行双角度测量,解决监测盲区以及视线与洞室表面小角度相交引起的误差问题;
30.(4)本发明将三维激光扫描仪固定,以确定角度方式进行快速的数据配准,即相邻两次监测扫描视线相同,可对洞室中的不稳定体大变形进行数据快速查找、计算,能够在施工期对不稳定体进行实时预报;
31.(5)采用自动防尘门解决洞室施工期的灰尘问题,保证监测精度和仪器的安全性。
附图说明
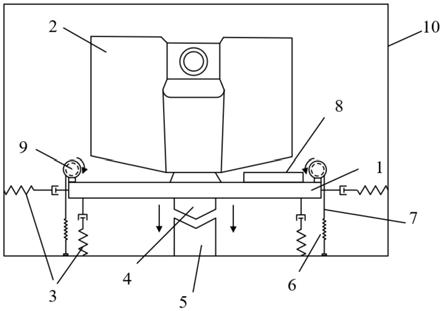
32.图1为本发明的主视图;
33.图2为本发明的侧视图;
34.图3为本发明中防尘门结构示意图;
35.图4为本发明中对中的工作原理示意图;
36.图5为本发明中三维激光扫描仪在洞室中布置的俯视图;
37.图6为本发明中数据分区区间划分示意图;
38.图7为本发明中三维激光扫描仪数据采集示意图;
39.图8为图7中a处三维激光扫描小角度测量示意图;
40.图9为图7中b处三维激光扫描遮挡测量示意图。
具体实施方式
41.下面结合附图对本发明的技术方案作进一步说明。
42.如图1、图2和图3所示,本发明一种洞室不稳定体监测的三维激光扫描系统,包括底座1、三维激光扫描仪2、弹性减震组件3、上对中块4、下对中块5、第一弹簧6、软带7、控制单元8、转轮9、壁槽10和自动防尘门11。
43.本发明的洞室上开挖有壁槽10,壁槽口设置有与控制单元相连接的自动防尘门11,控制单元控制自动防尘门11的开启和关闭,壁槽高度大于三维激光扫描仪顶部到洞室内壁的距离。底座1的下表面设置4个对称布置的弹性减震组件3,底座1的左右侧面和后侧分别设置有弹性减震组件3共6个,弹性减震组件3的一端与壁槽的内壁相连,实现底座1与洞室的相连,弹性减震组件3包括相互连接的阻尼器和第二弹簧。三维激光扫描仪2设置在底座1的上表面。上对中块4设置在底座的下表面,下对中块5设置于洞室内壁与上对中块相对应的位置,上对中块4上设置有圆锥形凸起,下对中块5上设置有相对应的凹槽;或者上对中块4上设置有圆锥形凹槽,下对中块5上设置有相对应的凸起。底座上表面对称设置有转
轮9,转轮9上连接有用于驱动转轮转动的转轮电机,转轮电机与控制单元的控制芯片相连接;软带7的一端绕设在转轮9上,软带7的另一端通过第一弹簧6与洞室内壁相连;控制单元8控制转轮电机驱动转轮9正反转,带动软带7拉紧或放松;非监测状态下,第一弹簧和软带处于松弛状态,上对中块和下对中块相脱离;监测状态下,第一弹簧和软带处于拉紧状态,上对中块和下对中块相卡合对中;其中第二弹簧的劲度系数小于第一弹簧的劲度系数,第一弹簧的高劲度系数保障弹簧拉紧状态下可提供足够大的力f1确保上对中块和下对中块相卡合对中紧密连接,如图4所示。
44.控制单元8与三维激光扫描仪相连,控制单元8包括带一侧开口且用于封装的保护盒以及位于保护盒内的控制芯片、无线通信模块和电源模块。如图5所示,三维激光扫描仪对测量范围内的洞室断面进行三维激光扫描,三维激光扫描可根据扫描角度确定洞室表面某位置的坐标数据,数据分析时无需基准点匹配即可定位两次数据采集中的形变量,当洞室完成衬砌后,洞室不稳定体监测的三维激光扫描系统可移动至洞室开挖段,重复使用。如图6所示,当激光扫描角度变化所对应的洞室表面数据设置为一个数据分析区间,其中不同分区的扫描角度α可设置为变量,并在初配准时确定。
45.如图4所示,本发明非监测状态时,系统整体由弹性减震组件支撑,软带和第一弹簧处于松弛状态,在非监测状态系统能够自由振动,并由弹性减震组件的阻尼器吸收振动能量,避免振动冲击;监测状态时,软带和第一弹簧处于旋紧状态,底座整体下移,直至上对中块和下对中块相卡合对中实现稳定连接,此时弹性减震组件的第二弹簧处于受压状态,产生f1作用力,软带连接的第一弹簧处于拉紧状态,根据弹簧性质和受力分析可知,即使软带及旋紧装置出现小幅度松动,第一弹簧的高劲度系数保障弹簧拉紧状态仍然提供足够大的力f2确保上对中块和下对中块相卡合对中实现紧密连接。
46.本发明一种洞室不稳定体监测的三维激光扫描系统的安装方法,包括如下步骤:
47.仪器定址:根据洞室洞径、开挖高度的不同,沿洞室轴线方向在洞室两侧选取相对应的洞室侧壁安装位置,轴线方向相邻洞室侧壁安装位置之间小于50m;
48.壁槽开挖及底座安装:在洞室侧壁安装位置处开挖壁槽并安装激光扫描系统,正确安装状态为:上对中块和下对中块相卡合对中时,弹性减震组件处于压缩状态;上对中块和下对中块相脱离时,弹性减震组件支撑底座;
49.防尘门及控制线路连接:将自动防尘门安装于壁槽洞口,将自动防尘门和转轮电机的控制线路接至控制芯片;
50.监测状态:数据采集时,控制芯片分别向自动防尘门和转轮电机发送控制信号,自动防尘门打开,转轮由转轮电机带动随脉冲信号转动,拉紧软带和第一弹簧,使底座整体下移,直至上对中块和下对中块相卡合对中,使三维激光扫描仪每次监测时处于同一基准位置;
51.非监测状态:数据采集完成后,控制芯片分别向自动防尘门和转轮电机发送控制信号,自动防尘门关闭,转轮由转轮电机带动随脉冲信号转动,松开软带和第一弹簧,使底座整体上移,上对中块和下对中块相脱离,由底座下部和侧面的弹性减震组件支撑整体重量。
52.如图7所示,本发明一种洞室不稳定体监测的三维激光扫描系统的扫描方法,包括如下步骤:
53.数据分区初配准:洞室两侧固定位置安装有相对应的三维激光扫描系统,三维激光扫描系统进入扫描状态进行初次数据采集,由无线通信模块将数据传输至外部处理系统,将洞室表面点云数据进行区域划分并标记角度方位,存储两侧仪器对于同一区域的角度方位初始配准结果;
54.数据分析及验证:监测数据分析时,以单侧仪器采集的整体数据快速进行分析,得到每个分区的变形结果,并根据初始配准结果采用另一侧数据进行补充验证,若两侧数据分析结果差值不超过阈值,则取均值作为分区变形量输出;若差值超过阈值,则将两侧数据进行融合并分析,查找数据空洞,数据空洞可能由测量小角度及遮挡造成,合并冗余数据,再计算区域变形结果;
55.变形计算和预警:根据监测需求设置数据采集的时间间隔,根据当前测量和前一次测量结果计算各分区的洞室变形量,查找洞室表面的大位移不稳定体位置,当某一分区变形量超过预设值则进行预警,在常规岩性、洞径情况下,该预设值可设置为5毫米。
56.本发明通过在洞室的两侧相对位置安装三维激光扫描仪,对测量范围内的洞室断面进行三维激光扫描,其中洞室不稳定体监测的三维激光扫描系统的布置方式能够将扫描数据的角度与洞室表面某位置的坐标建立数据对应关系,并将洞室表面进行分区标记,在初次扫描时,分别记录两侧扫描仪对应每个区域的扫描方位值,作为后续变形量分区计算的初配准基础数据。两侧相对布置能够提高洞室断面部分位置的数据采集精度,当发射激光与洞室表面夹角θ较小时,即使激光角度发生微小变化,测量位置也会产生较大变化,导致较大的数据空洞和测量误差,此时对应侧三维激光扫描仪的发射激光和该部分表面夹角较大,能够对该部位进行精准测量。当因洞室爆破开挖,其表面凹凸不平,单侧扫描时可能存在凸出部分遮挡,造成部分数据丢失,此时对应侧三维激光扫描仪可从另外一侧获取被遮挡部位数据;因此本发明中采用双侧对应位置设置三维激光扫描仪,当一侧激光处于小角度测量,相对位置激光可大角度准确采集数据,解决激光小角度测量误差较大问题;或当一侧激光采集凹凸不平表面存在遮挡问题,导致单侧数据采集不完整时,相对位置激光可对遮挡部分进行准确采集。如图8所示,当发射激光与洞室表面夹角较小时,即使激光角度发生微小变化,测量位置也会产生较大变化,导致产生较大的数据空洞和测量误差,此时,对应侧三维激光扫描仪的发射激光和该部分表面夹角较大,能够对该部位进行精准测量;其中θ为激光扫描和洞室表面的角度差,θ越小,扫描精度越差。如图9所示,开挖洞室表面呈凹凸不平状态,单侧扫描时可能存在凸出部分遮挡,造成部分数据缺失,此时对应侧三维激光扫描仪可从另外一侧获取被遮挡部位的数据;在相对的固定位置设置三维激光扫描仪,对洞室开挖的断面进行双角度测量,准确获取洞室表面形态数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1