一种基于机器视觉的激光三维扫描仪及扫描方法与流程
1.本发明涉及扫描设备技术领域,尤其涉及一种基于机器视觉的激光三维扫描仪及扫描方法。
背景技术:
2.三维激光扫描技术是国际上近期发展的一项高新技术。随着三维激光扫描仪在工程领域的广泛应用,这种技术己经引起了广大科研人员的关注。光学三维测量法是目前主要的测量方法,如散斑线结构光、光栅、激光扫描。激光扫描相对来说硬件结构简单,对环境依赖少,最适合用于结构复杂的三维扫描。利用三维激光扫描技术获取的空间点云数据,可快速建立结构复杂、不规则的场景的三维可视化模型。
3.现有的激光三维扫描仪在扫描物体时容易必须依靠被测物体和测量设备间的固定距离,导致测量十分不便,同时现有测量仪不便携带,操作复杂,因此我们提出了一种基于机器视觉的激光三维扫描仪及扫描方法,用于解决上述所提出的问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在扫描物体容易必须依靠被测物体和测量设备间的固定距离,现有测量设备的不便携性,操作复杂等缺点,提出的一种基于机器视觉的激光三维扫描仪及扫描方法。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于机器视觉的激光三维扫描仪,包括机械部件、硬件部分和软件部分:
7.所述机械部件包括壳体以及与壳体相适配的电池座,壳体的一侧呈上下对称设有两个相机,壳体的一侧对称设有两个位于对应相机外侧的补光灯,壳体的一侧对称设有两个位于两个相机之间的激光头,且两个相机、两个激光头和两个补光灯均与电池座电性连接,电池座的一侧设有充电接口,壳体远离相机的一侧设有多个usb接口以及控制开关按钮;
8.所述硬件部分包括arm芯片和mcu;
9.采用所述arm芯片控制整个硬件系统,并和工控机之间通过usb接口传输图像和数据信息;
10.采用所述mcu的硬件中断计时器输出触发信号,保证相机和激光头同步;
11.所述软件部分包括系统的标定、激光点云线的提取、提取点的跟踪和优化、三维模型的后处理、三维重建系统以及三维轮轨测量系统的研发。
12.优选的,所述系统的标定为内置参数的标定、双目摄像机的标定和激光平面的标定。
13.优选的,所述激光点云线的提取是在图像预处理时,采用中值滤波方法去除杂质,再利用canny算法对图像边缘进行提取,滤掉其它杂质点和误差较大的边缘点,最后获得消除背景影响的激光线和标志点。
14.优选的,所述提取点的跟踪和优化为提取到关键的标志点后,需要进行实时跟踪和匹配,最后拼接成三维廓形。
15.优选的,所述三维重建系统是在被检测物体上贴反光标志点,实时计算三维点云,跟踪扫描仪的位置姿态,离线优化得到精细的三维重建模型。
16.优选的,所述三维轮轨测量系统的研发包括测量系统结构的设计、硬件的设计、软件算法的设计以及人机交互式软件的研究。
17.优选的,所述相机的触发信号和激光头的触发信号相位独立可调,调整输出触发的相位保证激光头发出的时间和相机采集的时间同步。
18.一种基于机器视觉的激光三维扫描方法,包括如下步骤:
19.s1、首先对该设备进行初始化,初始化成功后,开始进行扫描;
20.s2、第一帧图片的位姿设为单位阵,创建关键帧,添加全局3d点到地图点,第一帧图片的3d数据点个数要大于3个,否则重新初始化,再开始扫描;
21.s3、接着扫描第二帧,先跟关键帧进行匹配,利用当前帧的数据点,通过三角形约束找出跟关键帧的3个匹配点,3个点对计算出初始距离,通过初始距离找出更多的匹配点,若3d数据点的匹配误差都在10mm以内,这说明匹配成功,这样就完成了当前帧跟关键帧的匹配;
22.s4、若匹配不成功,需要寻找与前一帧,进行类似匹配,需要重新进行定位,再重新创建关键帧,若匹配成功,就可以得到当前帧与参考帧之间匹配的地图点,扩充了地图点,完成当前帧与参考帧(关键帧)的拼接;
23.s5、计算当前地图上任意两点间的距离,再把当前帧创建为关键帧,完成了局部优化,以此类推,直到所有帧的照片完成了拼接,得到了完整的3d点云;
24.s6、如果创建关键帧不成功,则结束拼接工作。
25.本发明中,利用三维激光测量系统的算法可以大大提高测量的精度,并且无需在固定距离进行测量,提高了测量的灵活性,使得整个测量设备操作更加的简单、方便,同时也便于携带,提高了实用性。
附图说明
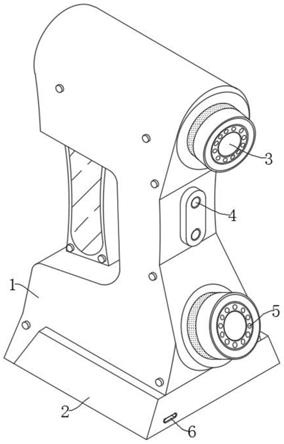
26.图1为本发明提出的一种基于机器视觉的激光三维扫描仪的整体结构立体图;
27.图2为本发明提出的一种基于机器视觉的激光三维扫描仪的硬件功能模块框图;
28.图3为本发明提出的一种基于机器视觉的激光三维扫描仪的三维激光测量系统的算法流程图;
29.图4为本发明提出的一种基于机器视觉的激光三维扫描仪的便携式三维轮轨测量系统研发的整体框架图。
30.图中:1、壳体;2、电池座;3、相机;4、激光头;5、补光灯;6、充电接口。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
32.实施例一
33.参照图1-4,一种基于机器视觉的激光三维扫描仪,包括机械部件、硬件部分和软件部分,机械部件包括壳体1以及与壳体1相适配的电池座2,壳体1的一侧呈上下对称设有两个相机3,壳体1的一侧对称设有两个位于对应相机3外侧的补光灯5,壳体1的一侧对称设有两个位于两个相机3之间的激光头4,且两个相机3、两个激光头4和两个补光灯5均与电池座2电性连接,电池座2的一侧设有充电接口6,壳体1远离相机5的一侧设有多个usb接口以及控制开关按钮;硬件部分包括arm芯片和mcu,采用arm芯片控制整个硬件系统,并和工控机之间通过usb接口传输图像和数据信息,采用mcu的硬件中断计时器输出触发信号,保证相机3和激光头4同步;软件部分包括系统的标定、激光点云线的提取、提取点的跟踪和优化、三维模型的后处理、三维重建系统以及三维轮轨测量系统的研发。
34.实施例二
35.在实施例一的基础上进一步改进的:参照图1-4,一种基于机器视觉的激光三维扫描仪,包括机械部件、硬件部分和软件部分。
36.机械部件包括壳体1以及与壳体1相适配的电池座2,壳体1的一侧呈上下对称设有两个相机3,壳体1的一侧对称设有两个位于对应相机3外侧的补光灯5,壳体1的一侧对称设有两个位于两个相机3之间的激光头4,且两个相机3、两个激光头4和两个补光灯5均与电池座2电性连接,电池座2的一侧设有充电接口6,壳体1远离相机5的一侧设有多个usb接口以及控制开关按钮。
37.本发明中,相机3的触发信号和激光头4的触发信号相位独立可调,调整输出触发的相位保证激光头3发出的时间和相机3采集的时间同步。
38.硬件部分中采用arm芯片控制整个硬件系统,并和工控机之间通过usb接口传输图像和数据信息。
39.硬件部分中采用mcu的硬件中断计时器输出触发信号,保证相机3和激光头4同步。
40.软件部分中的系统的标定为内置参数的标定、双目摄像机的标定和激光平面的标定。
41.软件部分中激光点云线的提取是在图像预处理时,采用中值滤波方法去除杂质,再利用canny算法对图像边缘进行提取,滤掉其它杂质点和误差较大的边缘点,最后获得消除背景影响的激光线和标志点。
42.软件部分中提取点的跟踪和优化为提取到关键的标志点后,需要进行实时跟踪和匹配,最后拼接成三维廓形。
43.软件部分中三维重建系统是在被检测物体上贴反光标志点,实时计算三维点云,跟踪扫描仪的位置姿态,离线优化得到精细的三维重建模型。
44.软件部分中三维轮轨测量系统的研发包括测量系统结构的设计、硬件的设计、软件算法的设计以及人机交互式软件的研究。
45.一种基于机器视觉的激光三维扫描方法,包括如下步骤:
46.s1、首先对该设备进行初始化,初始化成功后,开始进行扫描;
47.s2、第一帧图片的位姿设为单位阵,创建关键帧,添加全局3d点到地图点,第一帧图片的3d数据点个数要大于3个,否则重新初始化,再开始扫描;
48.s3、接着扫描第二帧,先跟关键帧进行匹配,利用当前帧的数据点,通过三角形约束找出跟关键帧的3个匹配点,3个点对计算出初始距离,通过初始距离找出更多的匹配点,
若3d数据点的匹配误差都在10mm以内,这说明匹配成功,这样就完成了当前帧跟关键帧的匹配;
49.s4、若匹配不成功,需要寻找与前一帧,进行类似匹配,需要重新进行定位,再重新创建关键帧,若匹配成功,就可以得到当前帧与参考帧之间匹配的地图点,扩充了地图点,完成当前帧与参考帧(关键帧)的拼接;
50.s5、计算当前地图上任意两点间的距离,再把当前帧创建为关键帧,完成了局部优化,以此类推,直到所有帧的照片完成了拼接,得到了完整的3d点云;
51.s6、如果创建关键帧不成功,则结束拼接工作。
52.一种基于机器视觉的激光三维扫描仪的设计方法,包括以下步骤:
53.s1、首先研究出基于三维激光测量的检测系统的总体方案;
54.s2、再根据图像处理技术,设计检测系统的硬件模块、算法模块和软件模块;
55.s3、确定好硬件模块方案后,对硬件系统的原理图和pcb板进行设计;
56.s4、然后进行激光传感器和镜头的选型;
57.s5、接着将所有传感器连接起来,保证电路能正常工作;
58.s6、最后编写控制板的程序,实现数据传输和usb协议的实现。
59.然而,如本领域技术人员所熟知的,电池座2、相机3、激光头4和补光灯5的工作原理和接线方法是司空见惯的,其均属于常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配。
60.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1