一种船载光电吊舱和雷达协同目标跟踪方法与流程
1.本发明属于自动控制技术,涉及一种船载光电吊舱和雷达协同目标跟踪方法,用途是控制船载光电吊舱更快更准的跟随雷达运动。
背景技术:
2.船载光电吊舱集成了电视摄像机、红外热像仪和激光测距机,主要用于探测和跟踪海面、空中疑似目标。为了实现远距离探测和跟踪,吊舱内通常搭载长焦距的电视和红外传感器,其视场较小,导致光电吊舱无法在广阔的海面和空中快速搜索到疑似目标。为了实现快速搜索和及时预警,船载光电吊舱通常配合雷达协同执行任务。雷达持续对指定海面和空域快速扫描,发现疑似目标后,将目标的位置(方位角和俯仰角)发送给光电吊舱,光电吊舱快速转动到对应位置,发现并跟踪目标,实现对疑似目标的快速捕获和跟踪。
3.传统的光电吊舱角度从动控制通常采用pid控制算法,其具有算法简单、易于实现等优点,广泛应用于工业自动控制中。但光电吊舱是一个非线性系统,非常难以精确建立数学模型。因此传统的pid控制器在光电吊舱的角度从动控制过程中,难以同时兼顾快速性和精准性。因此需要采用更先进和复杂的控制算法来实现光电吊舱角度从动时的快速响应和高精度控制。
技术实现要素:
4.为解决现有技术存在的问题,本发明提出一种船载光电吊舱和雷达协同目标跟踪方法,在pid控制器的基础上,不仅把当前周期的角度偏差作为控制输入量,计算出当前周期的控制输出量,还引入了前一周期的角度偏差计算出的控制输出量,叠加到一起,来控制光电吊舱快速和精准的跟随雷达运动。
5.本发明的技术方案为:
6.所述一种船载光电吊舱和雷达协同目标跟踪方法,包括以下步骤:
7.步骤1:将雷达和光电吊舱的初始零位校准到同一位置;
8.步骤2:雷达持续扫描指定海面和空域,当有可疑目标入侵时,雷达扫描到目标,将目标的位置θr发送给光电吊舱;
9.步骤3:光电吊舱根据目标的位置θr,进行从动控制,其中从动控制稳定环路的输入为:
10.u=ud+u
p
11.其中u
p
为以当前时刻的角度偏差θe作为从动pid控制器的输入,计算出的控制输出量,θe为雷达角度θr和光电吊舱角度θ
t
存在的偏差;ud为以上一时刻的角度偏差θ
′e(s)作为从动pid控制器的输入,计算出的控制输出量。
12.进一步的,控制输出量u
p
为:
13.14.其中k
p
为从动pid控制器的比例系数、ti为积分时间常数、td为微分时间常数。
15.进一步的,控制输出量ud为:
[0016][0017]
其中q(s)为低通滤波器,t为系统采样时间,e-ts
为延迟环节。
[0018]
有益效果
[0019]
本发明提出的船载光电吊舱和雷达协同目标跟踪方法引入上一时刻的角度偏差计算出的控制量来补偿从动pi d控制器的输出,将上一周期的偏差和本周期的偏差结合起来,经过几个周期的控制之后,能够显著提高系统的控制精度。
[0020]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0021]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0022]
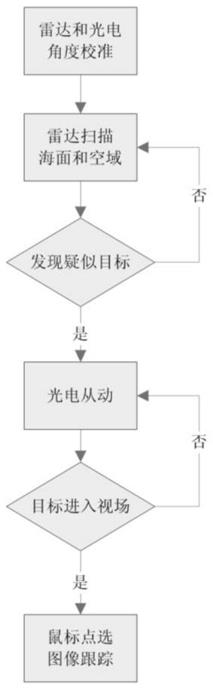
图1:雷达和光电协作探测入侵目标的工作流程;
[0023]
图2:光电角度从动控制算法的控制原理;
[0024]
图3:引入前一周期的控制量补偿前后的角度跟踪曲线;
[0025]
图4:引入前一周期的控制量补偿前后的角度误差曲线。
具体实施方式
[0026]
下面详细描述本发明的实施例,所述实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0027]
船载光电吊舱和雷达协作时,首先将雷达和光电吊舱的初始零位校准到同一位置。雷达持续扫描指定海面和空域,当有可疑目标入侵时,雷达能较快的扫描到目标,将目标的位置θr发送给光电吊舱,光电吊舱快速转动到对应位置搜寻目标。若在光电吊舱视场中未发现目标,则光电吊舱继续从动雷达运动,直至目标出现在光电吊舱视场中。在光电吊舱的电视或红外图像中用鼠标点选疑似目标,光电吊舱进入图像跟踪模式,保持对疑似目标的持续图像跟踪,提供疑似目标的图像信息和位置信息给指挥人员,由指挥人员决策下一步动作。
[0028]
由于电视和红外传感器的视场较小,因此光电吊舱从动雷达时,要求伺服速度和精度很高,才能保证在视场中发现疑似目标。从动控制算法的控制原理为:
[0029]
雷达角度θr和光电吊舱角度θ
t
存在偏差θe时:
[0030]
θe=θ
r-θ
t
[0031]
当前时刻的角度偏差θe作为从动pid控制器的输入,计算出控制输出量u
p
:
[0032][0033]
其中k
p
为从动pid控制器的比例系数、ti为积分时间常数、td为微分时间常数。通过调节从动pid控制器的3个控制参数k
p
、ti、td来获得较好的控制效果。被控对象的数学模型
越精确,pid控制的控制效果较好。对于难以建立精确数学模型的复杂系统,pid控制的控制效果并不理想。
[0034]
而光电吊舱是一个非常难以建模的复杂机电一体化系统,为了兼顾从动的快速性和精准性,结合船只受海浪冲击表现出周期性的往复摇摆运动,本发明中引入上一时刻的角度偏差计算出的控制量来补偿从动pid控制器的输出。将上一周期的偏差和本周期的偏差结合起来,经过几个周期的控制之后,能够显著提高系统的控制精度。在从动pid的三个参数不变的情况下,上一时刻的角度偏差θ
′e(s)e-ts
计算出的控制输出量为:
[0035][0036]
其中,q(s)为低通滤波器,t为系统采样时间,e-ts
为延迟环节。
[0037]
将当前周期的角度偏差计算出的控制输出量与上一周期的角度偏差计算出的控制输出量叠加,作为稳定环路的输入:
[0038]
u=ud+u
p
[0039]
稳定环路控制光电吊舱的光轴在惯性空间保持稳定指向,以消除船体摇摆对光轴指向的影响。将控制输出量u作为稳定环路的输入,即可在吊舱稳定的同时,控制吊舱转动到指定角度,实现对雷达角度的从动。
[0040]
实施数据表明,引入上一周期的控制量之后,角度从动控制精度得到了显著提升,一个船摇周期内最大控制误差由0.33度提升到了0.12度。
[0041]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1