基于PPS的嵌入式INS测量时刻标定系统及方法与流程
基于pps的嵌入式ins测量时刻标定系统及方法
技术领域
1.本发明涉及定位导航技术领域,尤其涉及一种基于pps的嵌入式ins测量时刻标定系统及方法。
背景技术:
2.gnss(global navigation satellite system,全球卫星导航系统)导航定位依赖接收gnss卫星信号进行定位,具有全天候、实时、精度较高、导航误差不随时间累积等优点,但是也存在信号容易受到遮挡或干扰导致无法定位、数据更新率低以及在动态环境中可靠性较差等问题。
3.惯性导航系统(inertial navigation system,ins)是一种不依赖于外部信息的自主式导航系统。ins根据牛顿力学原理,由陀螺仪和加速度计测得的载体相对于惯性空间的角速度和加速度信息,积分求得载体的三维速度、位置和姿态信息等导航参数。ins是一种自主性强、隐蔽性好、不受气象条件限制、短时精度高的导航系统。其优点是不受外界环境(包括遮挡、电磁干扰等)影响,并可以在一定的时间内保证较高精度,缺点是定位误差会随时间积累。高精度的惯性导航器件成本可达百万人民币,而低成本惯性器件精度较低,且误差扩散比较快,难以满足长时间独立导航需求。
4.随着对运动载体的导航定位精度和可靠性要求的提高,单一的导航系统已经难以满足用户的需求。由于gnss和ins具有良好的优势互补性,因此gnss/ins组合可以提高系统的整体导航性能及导航精度。gnss/ins组合导航可以使用低成本惯导器件,具有成本上的优势,并且可以满足民用导航定位的需求。
5.对于不生产gnss芯片的gnss/ins组合导航研发单位,通常是购买gnss芯片和ins传感器(imu,高度计,里程计等),将gnss数据和ins传感器数据输入至嵌入式芯片(一般是arm或dsp),由嵌入式芯片完成gnss/ins组合定位。
6.对于gnss/ins导航定位系统,很多传感器的数据不包含时间信息,传感器测量时刻的标定是ins的一个重点和难点。如果测量时刻标定不准确,会导致定位结果不准确,并有可能导致ins滤波发散,无法收敛的严重后果。
技术实现要素:
7.本发明实施例所要解决的技术问题在于,提供一种基于pps的嵌入式ins测量时刻标定系统及方法,以提高gnss/ins组合导航定位的精度和可靠性。
8.为了解决上述技术问题,本发明实施例提出了一种基于pps的嵌入式ins测量时刻标定系统,包括gnss芯片、ins传感器以及嵌入式芯片,嵌入式芯片包含一个以输入时钟为基准的计数器timer,该计数器按照时钟频率自动累加,其中,嵌入式芯片包括中断服务函数、ins传感器数据处理模块、gnss数据解析模块、ins解算模块,gnss芯片通过数据总线发送gnss定位结果至嵌入式芯片,并通过gpio接口输入
purpose input/output,通用型输入输出)接口输入pps至嵌入式芯片;ins传感器发送imu(inertial measurement unit,惯性测量单元)、里程计、高度计传感器数据至嵌入式芯片。
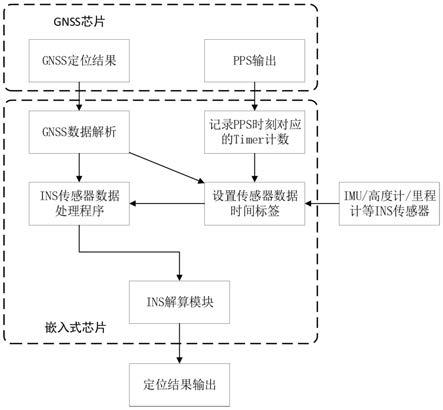
17.嵌入式芯片根据gnss定位结果完成gnss数据解析,得到定位数据;嵌入式芯片接收到pps中断后,在对应的中断服务函数中记录当前时刻的timer计数,并记录对应的gnss时间;嵌入式芯片接收到ins传感器的数据中断后,在中断服务函数中设置传感器数据时间标签,并发送至ins传感器数据处理模块;ins传感器数据处理模块接收gnss数据解析模块发送的定位数据,接收到传感器数据时间标签后,提取imu、里程计、高度计传感器数据,整理后发送至ins解算模块;ins解算模块完成ins解算,输出定位结果。
18.作为一种实施方式,在嵌入式芯片接收到gnss芯片发送的数据中断后,中断服务函数启动,从数据总线提取gnss数据并存至缓存,并发送给gnss数据解析模块,gnss数据解析模块接收到数据后,完成数据帧同步、校验、解析流程,提取位置、速度、时间信息发送至ins传感器数据处理模块或ins解算模块。
19.作为一种实施方式,嵌入式芯片在pps中断后,根据以下方法设置传感器数据时间标签:假设这是第个pps中断,记录timer计数,记为,因为pps信号比gnss时间数据来的早,所以只能根据上一个pps的时间来计算当前的gnss时间,记为;假设前后两个pps时间间隔为1s,计算公式为:;在ins传感器的数据中断后,进行数据延迟估计,延迟包括pps固有偏差、数据传输延迟,记为;读取当前数据中断的timer计数,记为,假设嵌入式系统的时钟频率为,则当前gnss时间的计算公式为:;根据计算的当前gnss时间设置传感器数据的时间标签。
20.本发明实施例的基于pps的嵌入式ins测量时刻标定方法,包括:步骤1、gnss芯片通过数据总线发送定位结果至嵌入式芯片;步骤2、gnss芯片通过gpio接口输入pps至嵌入式芯片;步骤3、嵌入式芯片完成gnss数据解析;步骤4、嵌入式芯片接收到pps中断后,在gnss数据中断服务函数中记录pps对应的timer计数,并记录对应的gnss时间;嵌入式芯片接收到ins传感器的数据中断后,在ins传感器数据中断服务函数中设置传感器数据时间标签,并发送至ins传感器数据处理模块;步骤5、ins传感器数据处理模块接收gnss数据解析模块发送的定位数据,接收到传感器数据时间标签后,提取imu、里程计、高度计传感器数据,整理后发送至ins解算模块;步骤6、ins解算模块完成ins解算;
步骤7、输出定位结果。
21.作为一种实施方式,gnss数据中断服务函数启动后,从数据总线提取gnss数据并存至缓存,发送给gnss数据解析模块;gnss数据解析模块接收到数据后,完成数据帧同步、校验、解析等流程,提取位置、速度、时间等信息,发送至ins传感器数据处理模块或者ins解算模块。
22.作为一种实施方式,1、pps中断服务函数启动,假设这是第个pps中断。
23.2、在pps中断服务函数中记录timer计数,记为。
24.3、计算当前的gnss时间,记为。因为pps信号比gnss时间数据来的早,所以只能根据上一个pps的时间来计算(假设前后两个pps时间间隔为1s),计算公式为:;gnss数据解析模块获取到当前的pps时间信息后再重新设置。
25.4、ins器件数据中断服务函数启动。以imu为例,假设这是第个imu数据中断,并且在第个pps中断之后产生。
26.5、数据延迟估计。延迟包括pps固有偏差、数据传输延迟等,记为。
27.6、设置时间标签。读取当前数据中断的timer计数,记为。假设嵌入式系统的时钟频率为,则当前gnss时间的计算公式为: ;7、ins器件数据中断的gnss时间计算完后,根据当前gnss时间设置好时间标签发送至传感器数据处理模块。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同范围限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1