永磁同步电机驱动器IGBT开路故障诊断方法
永磁同步电机驱动器igbt开路故障诊断方法
技术领域
1.本发明属于电机驱动器(逆变器)故障诊断技术领域,涉及永磁同步电机驱动器igbt开路故障诊断方法。
背景技术:
2.永磁同步电机(permanent magnet synchronous machine,pmsm)具有体积小、功率密度大、效率高等优点,广泛应用于交流调速系统中。同时,可实现电机驱动器(逆变器)预防性维护的状态监测与故障诊断技术也受到了广泛的关注。电机驱动器会受到许多不同类型故障的影响,例如定子故障、转子故障、机械故障、传感器故障和功率开关器件故障。据统计,在电力设备中,功率开关器件的故障概率约为34%;在交流调速系统中,功率开关器件的故障概率约为38%。因此,针对电机驱动器igbt故障诊断技术进行研究对提高系统的可靠性与稳定性具有十分重要的意义。
3.电机驱动器igbt故障主要分为短路故障和开路故障。短路故障发生时间较短,通常为几微秒,不易检测,系统中通常会串联快速熔断器等硬件保护电路,将短路故障转化为开路故障进行处理。开路故障在短时间内系统仍可继续运行,但若不及时检测,很可能会造成其他健康开关电流增大、发热严重,严重时可能会导致二次故障,造成巨大的经济损失。因此,对电机驱动器故障诊断的研究重点集中于igbt开路故障诊断。以三相两电平逆变器为例,故障类型主要分为单管故障和双管故障,由于三个及以上igbt同时发生开路故障的概率较低,故一般假设最多有两个igbt同时发生开路故障。
4.目前,基于观测器的诊断方法检测时间短,诊断效果好,应用十分广泛。然而,在实际运行工况中,由于工作点变化或内外部未知扰动,电机的电阻、电感等参数易受外部影响。而基于观测器的诊断方法由于是基于电流残差进行诊断,诊断变量对电机参数变化非常敏感,若使用固定阈值,则需要根据工作点变化或内外部未知扰动导致电机参数变化而进行调整,降低了故障诊断系统的鲁棒性和准确性。因此,本发明提出了一种基于luenberger观测器的改进自适应阈值永磁同步电机驱动器igbt开路故障诊断方法。
技术实现要素:
5.本发明的目的是提供一种永磁同步电机驱动器igbt开路故障诊断方法,采用该方法提高了由于工作点变化或内外部未知扰动导致电机参数变化引起的故障诊断的准确性和鲁棒性问题。
6.本发明所采用的技术方案是,永磁同步电机驱动器igbt开路故障诊断方法,具体包括如下步骤:
7.步骤1,建立永磁同步电机动态模型和luenberger观测器模型;
8.步骤2,将采集的三相定子电流与luenberger观测器模型估计的三相定子电流进行比较,将获得的当前电流残差作为诊断变量,通过将电流残差与设计的自适应阈值rk比较进行故障检测;
9.步骤3,通过αβ电流极性设计定位变量f
l
,结合检测变量rk和定位变量f
l
对不同的开路故障类型进行定位。
10.本发明的特点还在于:
11.步骤1中,永磁同步电机电流动态模型为:
[0012][0013]
式(1)中,id、iq分别是d、q轴电流分量;ud、uq分别是d、q轴电压分量;rs、ls分别是定子绕组电阻和定子绕组电感;ωr是机械角速度;ψf是转子磁链;
[0014]
将动态模型转换为线性系统的一般形式为:
[0015][0016]
其中:
[0017][0018][0019]
luenberger状态观测器方程为:
[0020][0021]
其中,和分别是x(t)和y(t)的估计值,k是反馈增益矩阵,表示为:
[0022][0023]
假设观测值与反馈之间的误差为e,则:
[0024][0025]
将式(2)和式(4)代入式(6)可得到:
[0026]
[0027]
式(7)是一个齐次微分方程,求解可得:
[0028]
e(t)=exp((a-kc)t)e(t0),t≥0
ꢀꢀꢀ
(8)。
[0029]
步骤2的具体过程为:
[0030]
采集三相定子电流和观测器估计的三相定子电流分别计算其对应的电流因子fk、为:
[0031][0032]fk
、产生的残差表示为:
[0033][0034]
将式(9)带入式(10)得:
[0035][0036]
其中,ε
sk
是观测误差,表示为:
[0037][0038]
式(11)中,电流残差rk按下式进行调整:
[0039][0040]
将自适应阈值tk表示为:
[0041][0042]
式(14)中,k为自适应阈值系数。
[0043]
步骤3中,在一个基本周期内,矢量相位从0
°
到360
°
变化,αβ轴分量的平均值为0,当发生开路故障后,αβ电流的平均值在每个周期不会均匀变化,故该变量可作为故障定位特征。
[0044]
步骤3中,设计定位变量f
l
的具体过程为:
[0045]
将采集的三相定子电流经clark变换得到αβ轴电流为:
[0046][0047]
将αβ轴电流归一化后得到该电流对应幅值为:
[0048][0049]
其中,ωe是电角速度;
[0050]
根据式(16)定义定位变量f
l1
和f
l2
,表示为:
[0051][0052]
其中,h代表故障阈值;
[0053]
将两个定位变量f
l1
和f
l2
统一为一个定位指标为:
[0054]fl
=3f
l1
+f
l2
ꢀꢀꢀ
(18)。
[0055]
本发明的有益效果是:本发明提出的永磁同步电机驱动器igbt开路故障诊断方法。在实际运行工况中,由于工作点变化或内外部未知扰动导致电机的电阻、电感等参数易受外部影响,在故障诊断时若使用固定阈值,则需要根据电机参数不确定性进行调整,因此,采用了改进自适应阈值的方法,与传统固定阈值的方法相比,提高了由于工作点变化或内外部未知扰动导致电机参数变化引起的故障诊断的准确性和鲁棒性问题。
附图说明
[0056]
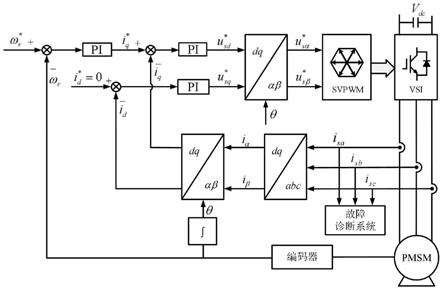
图1是本发明永磁同步电机驱动器igbt开路故障诊断方法中基于矢量控制的永磁同步电机故障诊断框图;
[0057]
图2是本发明永磁同步电机驱动器igbt开路故障诊断方法中基于luenberger观测器的改进自适应阈值开路故障诊断框图;
[0058]
图3是三相两电平电机驱动器结构原理图。
具体实施方式
[0059]
下面结合附图和具体实施方式对本发明进行详细说明。
[0060]
本发明永磁同步电机驱动器igbt开路故障诊断方法,其中基于矢量控制的永磁同步电机故障诊断框图如图1所示,具体按照以下步骤实施:
[0061]
步骤1,建立永磁同步电机电流动态模型和luenberger观测器模型,具体为:
[0062]
永磁同步电机电流动态模型为:
[0063][0064]
式(1)中,id、iq分别是d、q轴电流分量;ud、uq分别是d、q轴电压分量;rs、ls分别是定子绕组电阻和定子绕组电感;ωr是机械角速度;ψf是转子磁链。
[0065]
将动态模型转换为线性系统的一般形式为:
[0066][0067]
其中:
[0068][0069][0070]
luenberger状态观测器方程为:
[0071][0072]
其中,和分别是x(t)和y(t)的估计值,k是反馈增益矩阵,表示为:
[0073][0074]
反馈增益决定了观测器的动态性能,假设观测值与反馈之间的误差为e,则:
[0075][0076]
将式(2)和式(4)代入式(6)可得到:
[0077][0078]
式(7)是一个齐次微分方程,求解可得:
[0079]
e(t)=exp((a-kc)t)e(t0),t≥0
ꢀꢀꢀ
(8)
[0080]
式(8)中,当特征值λi(a-kc)(i=1,2,...,n)有负实部,e具有渐进稳定性,负实部
的绝对值越大,误差e收敛的越快。
[0081]
本发明诊断的开路故障类型包括单管和双管故障共15种。其中,模拟igbt开路故障是通过消除其相应的门极指令信号实现的。
[0082]
步骤2,基于luenberger观测器的改进自适应阈值开路故障诊断框图如图2所示,将采集的三相定子电流与luenberger观测器估计的三相定子电流进行比较,获得当前电流残差作为诊断变量,通过将电流残差与设计的自适应阈值rk比较进行故障检测,具体为:
[0083]
采集三相定子电流i
sk
(k=a,b,c)和观测器估计的三相定子电流分别计算其对应的电流因子fk、为:
[0084][0085]
两者产生的残差可表示为:
[0086][0087]
在正常和稳态运行情况下,电流残差rk应等于零。考虑由于工作点变化或测量噪声干扰导致电机参数变化,残差约等于零。
[0088]
将式(9)带入式(10)得:
[0089][0090]
其中,ε
sk
是观测误差,表示为:
[0091][0092]
式(11)中,电流残差rk可按下式进行调整:
[0093][0094]
为了避免工作点变化或内外部未知扰动导致的电机参数变化问题,阈值的选择较为关键。较大的阈值增加了诊断方法的鲁棒性,但也增加了检测时间,可能发生漏诊情况;较小的阈值缩短了检测时间,但会降低算法的鲁棒性,发生误警报。因此,可采用自适应阈值来解决这个问题,自适应阈值tk可表示为:
[0095][0096]
式(14)中,k为自适应阈值系数,其变化取决于电机工作点变化和估计误差变化,而估计误差ε
sk
取决于估计电流与实际电流的动态。
[0097]
在正常稳定运行情况下,每个相位的电流残差都应低于其相应的自适应阈值tk,而与电流瞬变和速度变化无关。当电机驱动器功率管发生开路故障后,对应的残差电流会超出相应的阈值,因此,可通过比较电流残差和自适应阈值检测到故障。
[0098]
步骤3,通过αβ电流极性设计定位变量f
l
,结合检测变量rk和定位变量f
l
对15种故
障类型进行诊断,故障检测和定位表如表1所示。具体为:
[0099]
在一个基本周期内,矢量相位从0
°
到360
°
变化,αβ轴分量的平均值为0。当发生开路故障后,αβ电流的平均值在每个周期不会均匀变化,故该变量可作为故障定位特征。
[0100]
将采集的三相定子电流经clark变换得到αβ轴电流为:
[0101][0102]
将αβ轴电流归一化后得到其对应幅值为:
[0103][0104]
其中,ωe是电角速度。
[0105]
根据式(16)定义定位变量f
l1
和f
l2
,可表示为:
[0106][0107]
其中,h代表故障阈值,可根据实际情况进行选择。
[0108]
为了简化方程,将两个定位变量f
l1
和f
l2
统一为一个定位指标为:
[0109]fl
=3f
l1
+f
l2
ꢀꢀꢀ
(18);
[0110]
根据式(17)和式(18),可得到15种开路情况下的对应的αβ电流极性。
[0111]
结合步骤2和步骤3的检测变量rk和定位变量f
l
即可完成对开路故障的诊断,见表1所示。
[0112]
表1
[0113][0114][0115]
基于矢量控制的永磁同步电机故障诊断框图如图1所示。首先,通过电流霍尔传感器检测到电机在三相静止坐标系下的三相电流i
sk
(k=a,b,c),经过clark变换(3s/2s)转换为两相静止坐标系下的电流i
α
、i
β
,此时,编码器采集到的角速度ωr通过积分得到角度θ,将i
α
、i
β
及θ经过park变换(2s/2r)转换为两相旋转坐标系下的电流id、iq。然后,将转速环角速度ωr与给定角速度作差经过pi调节器得到q轴电流给定d轴电流给定为0。将d轴电流给定d轴电流id以及q轴电流给定和q轴电流iq分别作差经过pi调节器得到d轴电压
给定和q轴电压给定经过反park变换(2r/2s)得到和最后,经过svpwm矢量控制驱动变换器vsi从而控制永磁同步电机。
[0116]
基于luenberger观测器的改进自适应阈值开路故障诊断框图如图2所示。采集的三相电流i
sk
(k=a,b,c)经过luenberger观测器得到估计的三相电流将采集的三相电流i
sk
(k=a,b,c)和估计的三相电流分别经过式(9)得到电流因子fk和两者做差可得到电流残差rk。为了提升故障检测的准确性和鲁棒性,将i
sk
(k=a,b,c)和通过设计的自适应阈值得到tk,电流残差rk与自适应阈值tk比较可实现故障检测。再将三相电流i
sk
(k=a,b,c)经过式(15)-(17)得到定位变量f
l
,结合故障检测和定位变量f
l
最终实现故障定位。
[0117]
三相两电平电机驱动器结构原理图如图3所示。驱动器主要由6个igbt功率管t1~t6组成,每个igbt顺向串联一个二极管,以增加器件的反向阻断能力,直流侧电源为u
dc
,电容c1、c2起到稳压和滤波的作用,负载为永磁同步电机pmsm。电机驱动器每一相的上下两个功率管互补导通,在任意时刻,每一相都有一个功率管导通,即180
°
导电方式。同一桥臂的上下功率管之间需要加入死区以避免直通。三相两电平电机驱动器一共有9种工作模式,分别是:t1、t6导通;t1、t2导通;t3、t4导通;t3、t2导通;t5、t4导通;t5、t6导通;t1、t4导通;t3、t6导通;t5、t2导通。
[0118]
本发明提出了一种基于luenberger观测器的改进自适应阈值永磁同步电机驱动器igbt开路故障诊断方法。在实际运行工况中,由于工作点变化或内外部未知扰动,电机的电阻、电感等参数易受外部影响。而基于观测器的诊断方法由于是基于电流残差进行诊断,诊断变量对电机参数变化非常敏感,若使用固定阈值,则需要根据工作点和参数模型不确定性进行调整。因此,采用了改进自适应阈值的方法,与传统固定阈值的方法相比,提高了由于工作点变化或内外部未知扰动导致电机参数变化引起的故障诊断的准确性和鲁棒性问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1