一种多角点倾斜摄影测量标志及其识别方法与流程
1.本发明涉及倾斜摄影测量技术领域,具体是一种多角点倾斜摄影测量标志及其识别方法。
背景技术:
2.倾斜摄影测量是摄影测量发展至数字摄影测量阶段的一项新技术。倾斜摄影测量是通过同一飞行平台搭载多台传感器,至少从一个垂直、四个倾斜等5个不同角度进行影像采集。影像经过影像匹配和数字计算后可获得待测点的精确三维坐标。倾斜摄影测量除了具备摄影测量的非接触、高精度和快速测量等优点外,还具备多角度、适应性强等特点。如果使用无人机作为搭载平台,还具备低空域等优势。这使得倾斜摄影测量技术可用于国土资源动态调查、数字城市、电力巡线、岩土体变形监测、大坝变形监测,甚至断层活动监测等诸多领域。
3.倾斜摄影测量作业时,为了测得待测点的精确坐标,一般在待测部位布置摄影测量标志,摄影测量标志的几何中心即代表待测点的位置。
4.在上述领域的应用中,往往涉及多时相重复作业。首次布置的测量标志可能会被遮挡,那么设计一种可以在多条件下能被传感器快速识别和捕获的摄影测量标志,才可能减少遮挡带来的不变。
5.可获取多角度地面影像是倾斜摄影测量的特点之一。为了使测量标志能被不同角度的传感器捕获影像,平面标志已经不能满足多角度拍摄的需要,立体的倾斜摄影测量标志的设计成为改变这一现状的关键技术之一。
6.倾斜摄影测量的另一个特点是高精度,提供多余观测时减少误差提高观测精度的常用方法。然而,平面的摄影测量标志不能提供多余观测。设计一种可提供多余观测的倾斜摄影测量标志是改变这一现状的另一项关键技术。
技术实现要素:
7.本发明的目的是提供一种多角点倾斜摄影测量标志及其识别方法,其中在使用该倾斜摄影测量标志进行测量时,倾斜摄影的镜头与水平面有更大的夹角范围,又可以提供更多的多余观测点,从而提高测量标志的定位精度,通过喷涂颜色可以实现快速捕获与识别。
8.为了达到上述目的,本发明采取的技术方案是:提供一种多角点倾斜摄影测量标志,包括:
9.底板,所述的底板为正方形,所述的正方形具有几何中心;
10.至少4个反射识别平板,所述的至少4个反射识别平板设置在所述的底板上,所述的至少4个反射识别平板与所述的正方形几何中心具有预先确定的空间位置关系,使得当所述的倾斜摄影测量标志置于一个空间时,所述的几何中心在所述的空间中的位置能够根据至少1个反射识别平板在所述空间中的位置以及所述的预先确定的空间关系计算获得。
11.所述至少4个反射识别平板设置在所述底板上的具有已知形状的平面,或者为设置在所述底板上的具有已知形状和颜色的区域。
12.所述空间关系为反射识别平板的边长与底板对角线边长关系、几何关系,底板几何中心与反射识别平面上特定点的对应关系。
13.所述至少4个反射识别平板具有两个平面,两个平面的几何编号相同,两个平面的特定点编号相同。
14.所述反射识别平板为等腰直角三角形,所述的等腰直角三角形的直角边等于所述的底板对角线的一半。
15.所述至少4个反射识别平板几何形状一致,边长一致。
16.所述至少4个反射识别平板与底板垂直。
17.所述4个反射识别的第一、二、三、四反射识别平板的一条直角边的直角点与底板的几何中心对应,直角边的另一个角点与底板第一、二、三、四直角点对应。
18.所述的多角点倾斜摄影测量标志的识别方法,包括如下步骤:
19.(1)测量标志埋设或布置
20.根据任务需要将测量标志埋设在指定位置,如基岩、沉积物、墙角;
21.(2)飞行场地勘察
22.抵达任务场地后,开展详细勘察,勘察内容包括任务场地的交通、地形、地貌情况,确认任务场地内是否存在高压电线、通讯基站、登山缆索危害飞行安全的物体,勘察完成后,选择合适的飞行起降场地进行飞行准备工作;
23.(3)飞行准备工作
24.①
.gnss基准站架设置;
②
.飞机通讯链路电台架设;
③
.飞机组装调试;
④
.任务区航线设计;
⑤
.飞机+地面控制站联调;
25.(4)快速dsm制作
26.飞行准备工作完成后,先在任务区安全高度以上,进行正射影像获取,正射影像获取任务飞行完成后,将gnss基准站数据、飞机机载gnss移动站数据、飞机飞控惯导和拍照信息数据、机载相机拍照的正射照片拷贝至任务现场的计算机内,进行快速dsm制作;
27.(5)倾斜摄影航拍
28.快速dsm制作完成后,根据获得的任务区域dsm数据,设计高分辨率的倾斜摄影航线,使无人机跟随地面仿地飞行并进行近距离拍摄,通过多个架次的不断飞行,获取任务区域的高分辨率倾斜摄影航拍数据,航拍完成后,将gnss基准站数据、飞机机载gnss移动站数据、飞机飞控惯导和拍照信息数据、机载相机获取的照片拷贝至移动硬盘内存放;
29.(6)实景三维数据制作
30.将移动硬盘的数据拷贝至计算机处理集群,使用专业处理软smart3d或contextcapture或mirauge3d进行处理,首先进行空中三角测量解算,获取每张照片的精确pos信息,然后进行实景三维重建,获得任务区域的实景三维模型数据;
31.(7)正射影像制作
32.根据生产出来的实景三维数据,进行垂直影像获取处理,获得任务区的正射影像成果;
33.(8)测量标志角点的二维坐标读取方法
34.将正射影像导入arcgis或其他遥感软件中,将影像中某一个角点放大至一个像元读取其二维坐标;
35.(9)测量标志角点的三维坐标读取方法
36.将dsm影像导入smart3d或其他软件中,将影像种某一个角点放大后,读取其三维坐标;
37.(10)重复(8)和(9)步骤量取多个角点的二维或三维坐标后,进行二维或三维坐标平差,获得测量标志的中心坐标,或根据角点与中心点的预设几何关系推导出中心点的坐标。
38.本发明的突出优点在于:
39.1、在使用该倾斜摄影测量标志进行测量时,倾斜摄影的镜头与水平面有更大的夹角范围,又可以提供更多的多余观测点,从而提高测量标志的定位精度。
40.2、通过喷涂颜色可以实现快速捕获与识别。
附图说明:
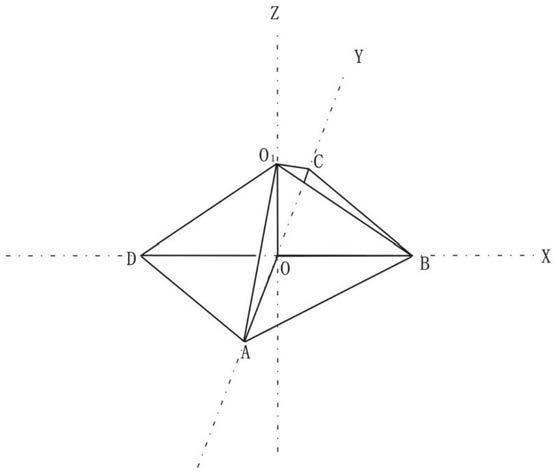
41.图1为本发明所述的多角点倾斜摄影测量标志的立体示意图。
42.图2为本发明所述的多角点倾斜摄影测量标志的俯视示意图。
43.图3为本发明所述的多角点倾斜摄影测量标志的侧视示意图。
44.图4为本发明所述的多角点倾斜摄影测量标志的识别方法流程图。
45.图5为本发明所述的多角点倾斜摄影测量标志的成品外观及整平方法图。
46.图6为本发明所述的多角点倾斜摄影测量标志识别前的野外倾斜摄影作业图。
47.图7为本发明所述的多角点倾斜摄影测量标志的角点二维坐标识别图。
48.图8为本发明所述的多角点倾斜摄影测量标志的角点三维坐标识别图。
具体实施方式
49.以下通过附图和实施例对本发明的技术方案作进一步详细描述。
50.实施例1
51.如图1到图3所示,本发明所述的多角点倾斜摄影测量标志,包括1块底板和4块等腰直角三角形板。该标志的整体轮廓为方锥体。即1块正方形底板,该正方形底板具有几何中心。整体轮廓如图1的o1abcd方锥,正方形底板如图1和图2中的正方形abcd,正方形底板的几何中心如图1和图3中的o。边长为28.28cm。
52.正方形底板设有至少4个反射识别板,至少4个反射识别板与正方形底板的几何中心o之间具有预先确定的空间位置关系。这种预先设定的空间位置关系在制作标志时可以实现。反射识别板为等腰直角三角形板,如图1中的o1oa、o1ob、o1oc和o1od。o1o、oa、ob、oc、od的腰长为20cm。等腰直角三角形板的一个角点,如图1中的a点,与正方形底板上的一个同名角点,正方形底板abcd中的a点相对应,等腰直角三角形的直角点,如图1中的o点,与正方形底板的几何中心,如图1中的o点,对应拼接。4块等腰直角三角形板拼接后,等腰直角三角形板的第三个角点成为方椎体的顶点,如图1、图2和图3中的o1点。
53.该至少4个反射识别板与底板的几何中心o的空间关系是已知的。因此,当将该倾斜摄影测量标志至于某个空间是,正方形底板的几何中心o在该空间中的空间中的位置将
能够根据该至少1个反射识别板在该空间中的位置以及该预先设定的空间位置关系计算获得。而该至少1个反射识别板在该空间的位置通过对该倾斜摄影测量标志进行倾斜摄影后相应地处理获得。因此,当倾斜摄影测量标志置于该空间之后,对该倾斜摄影测量获得该至少1个反射识别板在该空间中的位置,然后通过该至少1个放射识别板在该空间中的位置以及前述的,该至少设置的4个反射识别板与正方形底板几何中心o之间的预先确定的空间位置推算出底板几何中心o在该空间中的位置。
54.为了在倾斜摄影过程中更清晰更快速地识别出倾斜测量标志,可对该倾斜摄影测量标志进行分色喷涂。将一块反射识别板喷涂成黄色,如将图3中的o1oa反射识别板喷涂成黄色;将另一块放射识别板喷涂成蓝色,如将图3中的o1ob反射识别板喷涂成蓝色;将两块反射识别板与底板所构成的几何区域喷涂成红色,如将图3中的aob区域喷涂成红色。
55.该标志的整体轮廓为方锥体。
56.实施例2
57.本实施例为本发明述所述的多角点倾斜摄影测量标志的识别方法的一个实例,包括如下步骤:
58.(1)测量标志埋设或布置
59.为了测量地表变形,在测量标志下方焊接了连接杆,如在测量标志下方焊接了1m长的连接杆。在遮蔽度中等的情况下插入土中。使用罗盘上的圆水准器和管水准器整平测量标志。如图5所示。
60.(2)飞行场地勘察
61.本实施例模拟一次地表变形观测的任务,观测地表的沉降或抬升。抵达任务场地后,详细踏勘了周围地区,了解了当地的交通、地貌、输电线路、通讯基站、人员活动范围等特点。之后将勘作业区选择某河流阶地的耕地中。踏勘完成后,选择遮蔽度中等的玉米地埋设标志以及飞行起降场地。
62.(3)飞行准备工作
63.本实施例使用了大疆精灵4rtk单镜头无人机。飞行前,在野外进行了飞机组装调试、任务区航线设计、飞机与地面控制站联调等工作。航高设为7.5m,光圈2.8,快门速度1/160s,iso100,规划航线为井字形航线,倾斜摄影拍摄模式。
64.(4)快速dsm制作
65.飞行准备工作完成后,先在任务区安全高度以上,进行正射影像获取,正射影像获取任务飞行完成后,将gnss基准站数据、飞机机载gnss移动站数据、飞机飞控惯导和拍照信息数据、机载相机拍照的正射照片拷贝至任务现场的计算机内,进行快速dsm制作;
66.(5)倾斜摄影航拍
67.倾斜摄影航拍快速dsm制作完成后,根据获得的任务区域dsm数据,设计高分辨率的倾斜摄影航线,使无人机跟随地面仿地飞行并进行近距离拍摄。如图6所示。通过多个架次的不断飞行,获取任务区域的高分辨率倾斜摄影航拍数据。
68.(6)实景三维数据制作
69.航拍完成后,将飞机机载gnss移动站数据、飞机飞控惯导和拍照信息数据、机载相机获取的照片拷贝至移动硬盘内存放。将移动硬盘的数据拷贝至计算机处理集群,使用专业处理软smart3d或contextcapture或mirauge3d进行处理,进行空中三角测量解算,获取
每张照片的精确pos信息,然后进行实景三维重建,获得任务区域的实景三维模型数据。
70.(7)正射影像制作
71.根据生产出来的实景三维数据,进行垂直影像获取处理,获得任务区的正射影像成果。
72.(8)测量标志角点的二维坐标读取方法
73.将正射影像导入arcgis或其他遥感软件中,将影像中某一个角点放大至一个像元读取其二维坐标;如图7所示。
74.(9)测量标志角点的三维坐标读取方法
75.将dsm影像导入smart3d或其他软件中,将影像中某一个角点放大后,读取其三维坐标,如图8所示。
76.(10)重复(8)和(9)步骤量取多个角点的二维或三维坐标后,进行二维或三维坐标平差,获得测量标志的中心坐标,或根据角点与中心点的预设几何关系推导出中心点的坐标。
77.这里提供了一次飞行任务后的测量结果。如果需要进行沉积地表变形观测,重复(4)-(10)步骤开展复测,然后进行数据比较,即可获得两侧飞行任务时间间隔里的地表变形特征。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1