一种矿用测斜仪异常标定数据判定及处理方法与流程
1.本发明属于数据处理领域,涉及异常数据判定及处理方法,具体是一种矿用测斜仪异常标定数据判定及处理方法。
背景技术:
2.在煤矿井下瓦斯、水害等隐蔽致灾因素探查中,普遍使用钻探方法进行勘探,通过施工钻孔实现瓦斯抽放、探放水的目的。如何判断实际钻孔轨迹是否按照设计轨迹进行钻进以及终孔点是否达到设计靶点,是制约钻探效果的关键点。目前对于钻孔轨迹的测量大多采用钻孔测斜仪进行实现,测斜仪中的测量短节采用三轴地磁场传感器和三轴加速度传感器来确定在钻孔中的三个角度:倾角、方位角和面向角。由于煤矿井下特殊的使用环境,测斜仪在使用前需要对仪器进行标定,达到更高的测量精度。
3.目前针对基于磁传感器的测斜仪误差校正方法有很多,大多采用最小二乘法、基于椭圆假设法等方法对测量短节进行误差校正,取得了比较好的效果。但这些方法都是基于标定时采集的传感器原始数据没有干扰的前提下进行的,而标定过程中,传感器会受到标定环境、人工旋转无磁转台失误等因素的影响,造成空间内某些点处传感器实际采集数据与正常数据相差较大。通常标定时并不能及时发现所上述异常数据,这种情况下进行后续误差建模和误差系数计算时,解算出的传感器误差校正系数并不是真实的校正系数,从而降低了测斜仪测量精度。发生这种情况时,通常会将测斜仪探管在无磁转台上重新进行标定,造成了大量的人工和时间的浪费。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于,提供一种矿用测斜仪异常标定数据判定及处理方法,解决现有技术中测斜仪误差校正过程中传感器的采集数据与正常数据存在较大偏差而导致测量精度低和工作量大的技术问题。
5.为了解决上述技术问题,本发明采用如下技术方案予以实现:
6.一种矿用测斜仪异常标定数据判定及处理方法,该方法具体包括以下步骤:
7.步骤一,采用测斜仪确定旋转区间和给定位置,采用传感器在每一个给定位置进行数据采集并对采集得到数据进行预处理,得到给定位置的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
];
[0008]
所述的旋转区间和给定位置通过高精度三轴无磁转台的方位角、倾角和面向角来确定;
[0009]
步骤二,根据地磁场强度和重力场强度计算得到给定位置的三轴地磁场分量理论值h
2i
=[h
x2i
,h
y2i
,h
z2i
]和三轴加速度分量理论值g
2i
=[g
x2i
,g
y2i
,g
z2i
];
[0010]
其中:i表示给定位置的序号;
[0011]
步骤三,分别计算每个旋转区间内三轴地磁场数据实际采集平均值和三轴加
速度数据实际采集平均值分别计算每个旋转区间内三轴地磁场理论平均值和三轴加速度理论平均值并求出三轴磁场差值δhj以及三轴加速度差值δgj;
[0012]
其中:j取x,y和z,x,y和z分别表示传感器x轴,y轴和z轴;
[0013]
步骤四,分别判断三个轴的磁场差值|δhj|和加速度差值|δgj|是否满足公式(6),若成立,则进行步骤七,若不成立,则进入步骤五;
[0014][0015]
其中:
[0016]hm
为磁场判定阈值;
[0017]gm
为加速度判定阈值;
[0018]
步骤五,剔除不满足公式(6)的轴对应的三轴地磁场数据h
1i
和三轴加速度数据g1i中的首尾数据,重新计算传感器的三轴地磁场实际采集平均值和三轴加速度实际采集平均值并求出磁场差值|δhj′
|和加速度差值|δgj′
|;
[0019]
步骤六,判断磁场差值|δhj′
|和加速度差值|δgj′
|是否满足公式(9),若满足,则得到无异常的三轴地磁场数据和三轴加速度数据,进入步骤七;若不满足,则重复步骤五~步骤六,直至公式(9)成立;
[0020][0021]
步骤七,将步骤五中除当次剔除的数据之外剔除的首尾数据重新加回至步骤六得到的无异常的三轴地磁场数据和三轴加速度数据中,重复步骤四,直至磁传感器和加速度传感器采集的三轴地磁场数据和三轴加速度数据判定完成;
[0022]
步骤八,对步骤六得到的无异常的三轴地磁场数据和三轴加速度数据进行多项式拟合,并且对剔除的异常数据进行插值,得到更新后的三轴地磁场数据和三轴加速度数据,并对更新后的三轴地磁场数据和三轴加速度数据进行误差校正处理,得到校正后的倾角、方位角、面向角以及误差校正系数。
[0023]
本发明还包括以下技术特征:
[0024]
步骤一中,所述的数据采集和预处理的具体过程为:
[0025]
步骤1.1,将测斜仪探管放置在高精度三轴无磁转台上并固定,然后将无磁转台旋转至空间内的给定位置;
[0026]
步骤1.2,通过磁传感器和加速度传感器采集并进行中值平均滤波处理,得到的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
]。
[0027]
所述的给定位置通过高精度三轴无磁转台的方位角、倾角和面向角来确定的具体方法包括以下步骤:
[0028]
s1,选定高精度三轴无磁转台的方位角,将倾角分别旋转至-20
°
、-53
°
、-75
°
、-90
°
、0
°
、+20
°
、+53
°
、+75
°
和+90
°
,得到旋转区间;
[0029]
s2,在每个所述的倾角下,在0
°
~360
°
范围内每隔10
°
旋转工具的面向角,得到的36个给定位置。
[0030]
所述的三轴地磁场分量理论值h
2i
=[h
x2i
,h
y2i
,h
z2i
]和三轴加速度分量理论值g
2i
=[g
x2i
,g
y2i
,g
z2i
]分别按照公式(1)和公式(2)进行计算:
[0031][0032][0033]
其中:
[0034]
h0为地磁场强度;
[0035]
g0为重力场强度;
[0036]
α为磁倾角;
[0037]
为给定位置方位角;
[0038]
θ为给定位置倾角;
[0039]
γ为给定位置面向角;
[0040]
所述的步骤三具体包括以下步骤:
[0041]
步骤3.1,通过公式(3)计算每个旋转区间内三轴地磁场数据实际采集平均值和三轴加速度数据实际采集平均值
[0042][0043]
其中:
[0044]
j取x,y和z,x,y和z分别表示传感器x轴,y轴和z轴;
[0045]
m为每个旋转区间内给定位置的个数;
[0046]
步骤3.2,通过公式(4)计算每个旋转区间内三轴地磁场理论平均值和三轴加速度理论平均值
[0047][0048]
步骤3.3,通过公式(5)求出三轴地磁场理论平均值与三轴地磁场实际采集平
均值的磁场差值|δhj|以及三轴加速度理论平均值与三轴加速度实际采集平均值的加速度差值|δgj|。
[0049][0050]
所述的步骤五具体包括以下步骤:
[0051]
步骤5.1,剔除磁场差值或加速度差值不满足公式(3)的轴的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
]的首尾数据后,按照公式(4)计算传感器的三轴地磁场实际采集平均值和三轴加速度实际采集平均值
[0052][0053]
步骤5.2,按照公式(5)计算三轴地磁场理论平均值与三轴地磁场实际采集平均值的磁场差值|δh
′j|以及三轴加速度理论平均值与三轴加速度实际采集平均值的加速度差值|δgj′
|。
[0054][0055]
本发明与现有技术相比,有益的技术效果是:
[0056]
本发明中通过对测斜仪标定原始采集数据进行判别和筛选,消除了标定过程中由于人为读数误差所导致的某些采集数据与正常数据偏差较大的问题,提高了测斜仪误差补偿精度及姿态解算精度;通过对判定后的采集数据进行拟合插值,进一步提高了原始数据可靠性,避免了由于原始采集数据异常导致测斜仪的重复标定,消除了人为读数误差所导致的测斜仪测量精度降低的问题;解决现有技术中测斜仪误差校正过程中传感器的采集数据与正常数据存在较大偏差而导致测量精度低和工作量大的技术问题。
附图说明
[0057]
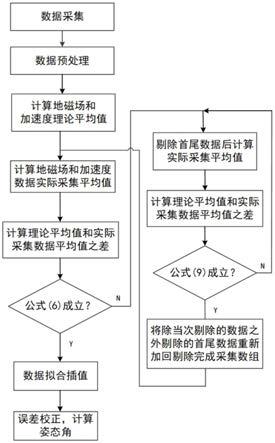
图1为本发明的测斜仪标定异常数据判别方法的流程图;
[0058]
图2为受干扰后测斜仪标定倾角误差曲线;
[0059]
图3为异常数据判定处理后测斜仪标定倾角误差曲线;
[0060]
图4为受干扰后测斜仪标定方位角误差曲线;
[0061]
图5为异常数据判定处理后测斜仪标定方位角误差曲线。
[0062]
以下结合实施例对本发明的具体内容作进一步详细解释说明。
具体实施方式
[0063]
需要说明的是,本发明中的正常数据是指没有人为误差的实际采集数据。
[0064]
需要说明的是,本发明中的所有零部件,在没有特殊说明的情况下,均采用本领域已知的零部件。
[0065]
以下给出本发明的具体实施例,需要说明的是本发明并不局限于以下具体实施例,凡在本技术技术方案基础上做的等同变换均落入本发明的保护范围。
[0066]
本发明给出了一种矿用测斜仪异常标定数据判定及处理方法,该方法具体包括以下步骤:
[0067]
步骤一,采用测斜仪确定旋转区间和给定位置,采用传感器在每一个给定位置进行数据采集并对采集得到数据进行预处理,得到给定位置的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
];
[0068]
旋转区间和给定位置通过高精度三轴无磁转台的方位角、倾角和面向角来确定;
[0069]
步骤二,根据地磁场强度和重力场强度计算得到给定位置的三轴地磁场分量理论值h
2i
=[h
x2i
,h
y2i
,h
z2i
]和三轴加速度分量理论值g
2i
=[g
x2i
,g
y2i
,g
z2i
];
[0070]
其中:i表示给定位置的序号;
[0071]
步骤三,分别计算每个旋转区间内三轴地磁场数据实际采集平均值和三轴加速度数据实际采集平均值分别计算每个旋转区间内三轴地磁场理论平均值和三轴加速度理论平均值并求出三轴磁场差值|δhj|以及三轴加速度差值|δgj|;
[0072]
其中:j取x,y和z,x,y和z分别表示传感器x轴,y轴和z轴;
[0073]
步骤四,分别判断三个轴的磁场差值|δhj|和加速度差值|δgj|是否满足公式(6),若成立,则进行步骤七,若不成立,则进入步骤五;
[0074][0075]
其中:
[0076]hm
为磁场判定阈值,取值范围是取200~500;
[0077]gm
为加速度判定阈值,取值范围是0.03~0.05;
[0078]
步骤五,剔除不满足公式(6)的轴对应的三轴地磁场数据h
1i
和三轴加速度数据g1i中的首尾数据,重新计算传感器的三轴地磁场实际采集平均值和三轴加速度实际采集平均值并求出磁场差值|δhj′
|和加速度差值|δgj′
|;
[0079]
步骤六,判断磁场差值|δhj′
|和加速度差值|δgj′
|是否满足公式(9),若满足,则得到无异常的三轴地磁场数据和三轴加速度数据,进入步骤七;若不满足,则重复步骤五~步骤六,直至公式(9)成立;
[0080]
[0081]
步骤七,将步骤五中除当次剔除的数据之外剔除的首尾数据重新加回至步骤六得到的无异常的三轴地磁场数据和三轴加速度数据中,重复步骤四,直至磁传感器和加速度传感器采集的三轴地磁场数据和三轴加速度数据判定完成;
[0082]
步骤八,对步骤六得到的无异常的三轴地磁场数据和三轴加速度数据进行多项式拟合,并且对剔除的异常数据进行插值,得到更新后的三轴地磁场数据和三轴加速度数据,并对更新后的三轴地磁场数据和三轴加速度数据进行误差校正处理,得到校正后的倾角、方位角、面向角以及误差校正系数。
[0083]
在上述技术方案中,步骤七中,若经过n次剔除后,公式(9)成立,则将步骤五中剔除的n-1次首尾数据重新加回至步骤六得到的无异常的三轴地磁场数据和三轴加速度数据中,重复步骤四,直至磁传感器和加速度传感器采集的三轴地磁场数据和三轴加速度数据判定完成;
[0084]
通过对测斜仪标定原始采集数据进行判别和筛选,消除了标定过程中由于人为读数误差所导致的某些采集数据与正常数据偏差较大的问题,提高了测斜仪误差补偿精度及姿态解算精度;通过对判定后的采集数据进行拟合插值,进一步提高了原始数据可靠性,避免了由于原始采集数据异常导致测斜仪的重复标定,消除了人为读数误差所导致的测斜仪测量精度降低的问题;解决了现有技术中测斜仪误差校正过程中传感器的采集数据与正常数据存在较大偏差而导致测量精度低和工作量大的技术问题。
[0085]
具体的,步骤一中,数据采集和预处理的具体过程为:
[0086]
步骤1.1,将测斜仪探管放置在高精度三轴无磁转台上并固定,然后将无磁转台旋转至空间内的给定位置;
[0087]
步骤1.2,通过磁传感器和加速度传感器采集并进行中值平均滤波处理,得到的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
]。
[0088]
具体的,给定位置通过高精度三轴无磁转台的方位角、倾角和面向角来确定的具体方法包括以下步骤:
[0089]
s1,选定高精度三轴无磁转台的方位角,将倾角分别旋转至-20
°
、-53
°
、-75
°
、-90
°
、0
°
、+20
°
、+53
°
、+75
°
和+90
°
,得到旋转区间;
[0090]
s2,在每个倾角下,在0
°
~360
°
范围内每隔10
°
旋转工具的面向角,得到的36个给定位置。
[0091]
三轴地磁场分量理论值h
2i
=[h
x2i
,h
y2i
,h
z2i
]和三轴加速度分量理论值g
2i
=[g
x2i
,g
y2i
,g
z2i
]分别按照公式(1)和公式(2)进行计算:
[0092][0093][0094]
其中:
[0095]
h0为地磁场强度;
[0096]
g0为重力场强度;
[0097]
α为磁倾角;
[0098]
为给定位置方位角;
[0099]
θ为给定位置倾角;
[0100]
γ为给定位置面向角;
[0101]
具体的,步骤三具体包括以下步骤:
[0102]
步骤3.1,通过公式(3)计算每个旋转区间内三轴地磁场数据实际采集平均值和三轴加速度数据实际采集平均值
[0103][0104]
其中:
[0105]
j取x,y和z,x,y和z分别表示传感器x轴,y轴和z轴;
[0106]
m为每个旋转区间内给定位置的个数;
[0107]
步骤3.2,通过公式(4)计算每个旋转区间内三轴地磁场理论平均值和三轴加速度理论平均值
[0108][0109]
步骤3.3,通过公式(5)求出三轴地磁场理论平均值与三轴地磁场实际采集平均值的磁场差值|δhj|以及三轴加速度理论平均值与三轴加速度实际采集平均值的加速度差值|δgj|。
[0110][0111]
具体的,步骤五具体包括以下步骤:
[0112]
步骤5.1,剔除磁场差值或加速度差值不满足公式(3)的轴的三轴地磁场数据h
1i
=[h
x1i
,hy1i,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
]的首尾数据后,按照公式(4)计算传感器的三轴地磁场实际采集平均值和三轴加速度实际采集平均值
[0113][0114]
步骤5.2,按照公式(5)计算三轴地磁场理论平均值与三轴地磁场实际采集平均值的磁场差值|δh
′j|以及三轴加速度理论平均值与三轴加速度实际采集平均值的加速度差值|δgj′
|。
[0115][0116]
实施例:
[0117]
本实施例给出了一种矿用测斜仪异常标定数据判定及处理方法,如图1所示,该方法具体包括以下步骤:
[0118]
步骤一,采用测斜仪确定旋转区间和给定位置,采用传感器在每一个给定位置进行数据采集并对采集得到数据进行预处理,得到给定位置的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
];
[0119]
旋转区间和给定位置通过高精度三轴无磁转台的方位角、倾角和面向角来确定;
[0120]
本实施例中,通过方位角、倾角和面向角确定9个区间内,9个区间内包括324处给定位置,在倾角为0
°
的旋转区间内,共计36处给定位置,在加速度传感器x轴数据中的第1,10,20位置和磁传感器x轴数据中的第1,10,20位置分别人为设置3个数据异常点,其余正常,如表1所示。测斜仪标定完成后倾角测量误差曲线如图2所示,倾角误差绝对值最大超过1
°
;方位角误差曲线如图4所示,方位角误差绝对值最大超过9
°
。
[0121]
表1.倾角0
°
时传感器采集数据
[0122]
[0123]
[0124][0125]
步骤二,根据地磁场强度和重力场强度计算得到给定位置的三轴地磁场分量理论值h
2i
=[h
x2i
,h
y2i
,h
z2i
]和三轴加速度分量理论值g
2i
=[g
x2i
,g
y2i
,g
z2i
];
[0126]
其中:i表示给定位置的序号;
[0127]
在本实施例中,计算得到倾角为0
°
时36个给定位置的三轴地磁场分量和三轴加速度分量理论值如表2所示。
[0128]
表2.倾角为0
°
时三轴地磁场分量和三轴加速度分量理论值
[0129]
[0130][0131]
步骤三,分别计算每个旋转区间内三轴地磁场数据实际采集平均值和三轴加速度数据实际采集平均值分别计算每个旋转区间内三轴地磁场理论平均值和三轴加速度理论平均值并求出三轴磁场差值|δhj|以及三轴加速度差值|δgj|;
[0132]
其中:j取x,y和z,x,y和z分别表示传感器x轴,y轴和z轴;
[0133]
在本实施例中,倾角为0
°
旋转区间内36个给定位置的三轴地磁场数据实际采集平
均值三轴加速度数据实际采集平均值三轴地磁场理论平均值三轴加速度理论平均值三轴磁场差值|δhj|以及三轴加速度差值|δgj|,如表3所示。
[0134]
表3.倾角为0
°
采集数据、理论数据及对应差值
[0135][0136]
步骤四,分别判断三个轴的磁场差值|δhj|和加速度差值|δgj|是否满足公式(6),若成立,则进行步骤七,若不成立,则进入步骤五;
[0137][0138]
其中:
[0139]hm
为磁场判定阈值,取值为200;
[0140]gm
为加速度判定阈值,取值为0.03;
[0141]
在本实施例中,参见表3的数据,判断是否满足公式(6)判定条件,经过判断得到加速度x轴和地磁场x轴数据不满足公式(6)的判定条件,故将加速度传感器和地磁场传感器x轴数据代入步骤五中;加速度传感器和地磁场传感器的y轴和z轴数据满足公式(6)判定条件,代入步骤七中;
[0142]
步骤五,剔除不满足公式(6)的轴对应的三轴地磁场数据h
1i
和三轴加速度数据g1i中的首尾数据,重新计算传感器的三轴地磁场实际采集平均值和三轴加速度实际采集平均值并求出磁场差值|δhj′
|和加速度差值|δgj′
|;
[0143]
在本实施例中,首次剔除加速度x轴和地磁场x轴首尾数据后,地磁场x轴实际采集平均值和加速度x轴实际采集平均值以及地磁场x轴差值|δh
x
′
|和加速度x轴差值|δg
x
′
|如表4所示。
[0144]
表4.首次剔除首尾数据后地磁场、加速度x轴平均值及对应差值
[0145][0146]
步骤六,判断磁场差值|δhj′
|和加速度差值|δgj′
|是否满足公式(9),若满足,则得到无异常的三轴地磁场数据和三轴加速度数据,进入步骤七;若不满足,则重复步骤五~步骤六,直至公式(9)成立;
[0147][0148]
参见如表4的数据,剔除数据后地磁场传感器x轴和加速度传感x轴数据仍不满足公式(9),因此继续重复步骤五~步骤六,直至地磁场传感器x轴和加速度传感x轴数据满足公式(9);
[0149]
步骤七,将步骤五中除当次剔除的数据之外剔除的首尾数据重新加回至步骤六得到的无异常的三轴地磁场数据和三轴加速度数据中,重复步骤四,直至磁传感器和加速度传感器采集的三轴地磁场数据和三轴加速度数据判定完成;
[0150]
本实施例中,地磁场x轴和加速度x轴数据经过3次剔除后公式(9)成立,则将前两次剔除的数据重新加回至步骤六得到的无异常的三轴地磁场数据和三轴加速度数据中,重复步骤四,直至地磁场x轴数据和加速度x轴数据判定完成。
[0151]
步骤八,对步骤六得到的无异常的三轴地磁场数据和三轴加速度数据进行多项式拟合,并且对剔除的异常数据进行插值,得到更新后的三轴地磁场数据和三轴加速度数据,并对更新后的三轴地磁场数据和三轴加速度数据进行误差校正处理,得到校正后的倾角、方位角、面向角以及误差校正系数。
[0152]
本实施例中,对步骤七得到的无异常地磁场x轴数据和加速度x轴数据进行多项式拟合插值,拟合幂数为8次幂。得到更新后的地磁场x轴数据和加速度x轴数据,如表5所示
[0153]
表5.拟合插值后得到的最终地磁场、加速度x轴数据
[0154]
[0155][0156]
图3为采用本发明提供的异常数据判定和处理方法处理后,倾角测量误差曲线,可看出判定处理后,倾角绝对值可控制在0.3
°
之内;图5为采用本发明提供的异常数据判定和处理方法处理后,方位角测量误差曲线,可看出处理后方位角误差绝对值可控制在1.3
°
之内,证明本发明解决了现有技术中测斜仪误差校正过程中传感器的采集数据与正常数据存在较大偏差而导致测量精度低和工作量大的技术问题。
[0157]
作为本实施例的一种优选方案,步骤一中,数据采集和预处理的具体过程为:
[0158]
步骤1.1,将测斜仪探管放置在高精度三轴无磁转台上并固定,然后将无磁转台旋转至空间内的给定位置;
[0159]
步骤1.2,通过磁传感器和加速度传感器采集并进行中值平均滤波处理,得到的三轴地磁场数据h
1i
=[h
x1i,hy1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
]。
[0160]
作为本实施例的一种优选方案,给定位置通过高精度三轴无磁转台的方位角、倾角和面向角来确定的具体方法包括以下步骤:
[0161]
s1,选定高精度三轴无磁转台的方位角,将倾角分别旋转至-20
°
、-53
°
、-75
°
、-90
°
、0
°
、+20
°
、+53
°
、+75
°
和+90
°
,得到旋转区间;
[0162]
s2,在每个倾角下,在0
°
~360
°
范围内每隔10
°
旋转工具的面向角,得到的36个给定位置。
[0163]
三轴地磁场分量理论值h
2i
=[h
x2i
,h
y2i
,h
z2i
]和三轴加速度分量理论值g
2i
=[g
x2i
,g
y2i
,g
z2i
]分别按照公式(1)和公式(2)进行计算:
[0164][0165][0166]
其中:
[0167]
h0为地磁场强度;
[0168]
g0为重力场强度;
[0169]
α为磁倾角;
[0170]
为给定位置方位角;
[0171]
θ为给定位置倾角;
[0172]
γ为给定位置面向角;
[0173]
作为本实施例的一种优选方案,步骤三具体包括以下步骤:
[0174]
步骤3.1,通过公式(3)计算每个旋转区间内三轴地磁场数据实际采集平均值和三轴加速度数据实际采集平均值
[0175][0176]
其中:
[0177]
j取x,y和z,x,y和z分别表示传感器x轴,y轴和z轴;
[0178]
m为每个旋转区间内给定位置的个数;
[0179]
步骤3.2,通过公式(4)计算每个旋转区间内三轴地磁场理论平均值和三轴加速度理论平均值
[0180]
[0181]
步骤3.3,通过公式(5)求出三轴地磁场理论平均值与三轴地磁场实际采集平均值的磁场差值|δhj|以及三轴加速度理论平均值与三轴加速度实际采集平均值的加速度差值|δgj|。
[0182][0183]
作为本实施例的一种优选方案,步骤五具体包括以下步骤:
[0184]
步骤5.1,剔除磁场差值或加速度差值不满足公式(3)的轴的三轴地磁场数据h
1i
=[h
x1i
,h
y1i
,h
z1i
]和三轴加速度数据g
1i
=[g
x1i
,g
y1i
,g
z1i
]的首尾数据后,按照公式(4)计算传感器的三轴地磁场实际采集平均值和三轴加速度实际采集平均值
[0185][0186]
步骤5.2,按照公式(5)计算三轴地磁场理论平均值与三轴地磁场实际采集平均值的磁场差值|δh
′j|以及三轴加速度理论平均值与三轴加速度实际采集平均值的加速度差值|δgj|。
[0187]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1