超、特高压变电站GIS设备带电检测机器人的制作方法
超、特高压变电站gis设备带电检测机器人
技术领域
1.本实用新型涉及一种辅助装置,更确切的说是一种超、特高压变电站gis设备带电检测机器人。
背景技术:
2.授权公告号cn206960956u公开了变电站gis设备带电检测机器人,我们在应用中发现这种机器人有时会安装到距离地面2
‑
3米的管道上,在拆卸这个机器人时工人需要踩着人字梯,才能够将这个机器人取下,有时不慎还会让机器人掉落摔坏,对公司造成损失,另外工人手工取下机器人也存在一定的危险性。
技术实现要素:
3.本实用新型的目的是提供一种超、特高压变电站gis设备带电检测机器人,能够方便工人无需踩着人字梯,只需要站在地面上操作升降装置,从而带动插接杆和第二固定环插接配合,从而在需要将变电站gis设备带电检测机器人从管道上取下时能够让工人能够更加方便地操作。
4.本实用新型为实现上述目的,通过以下技术方案实现:
5.超、特高压变电站gis设备带电检测机器人,包括变电站gis设备带电检测机器人和推车,变电站gis设备带电检测机器人的一侧具有控制箱,所述控制箱的外侧连接第二固定环,推车的上部安装升降装置,升降装置的固定端与推车配合,升降装置的升降端部连接插接杆,插接杆的上端连接尖端,尖端能够与第二固定环插接配合,升降装置的升降端侧部安装网兜,网兜位于插接杆的下方。
6.为了进一步实现本实用新型的目的,还可以采用以下技术方案:所述升降装置包括升降管,升降管为下端封口的管状壳体,升降管的下端为升降装置的固定端,升降管的下端与推车的上部铰接,升降管的上端插接升降杆,升降杆为杆状结构,升降杆能够在升降管的内部滑动,升降杆的上端为升降装置的升降端,升降管的侧部开设螺孔,升降管通过螺孔螺纹连接第一螺栓,第一螺栓的丝杆端部能够与升降杆的侧部配合,第一螺栓能够将升降杆和升降管锁定,升降杆的侧部连接网兜固定环,网兜固定环的下部安装网兜,网兜为上部开口的纤维网制成的壳体结构,网兜的开口侧周与网兜固定环的侧周连接,网兜固定环使网兜的上部开口保持打开状态,推车的上部连接半圆形板,半圆形板为半圆形的板状结构,升降管的侧部连接u形板,u形板位u形的板状结构,u形板能够套在半圆形板上个,u形板的一侧开设螺孔,u形板能够通过螺孔螺纹连接第二螺栓,第二螺栓能够与u形板的一侧配合夹住半圆形板。
7.所述升降杆的侧部连接把手。
8.所述控制箱的侧部连接第一固定环,第二固定环的中心轴与第一固定环的中心轴相互垂直。
9.所述网兜上部开口面积可以设置为两平方米。
10.所述升降装置包括升降杆和升降管,升降管的下端与推车连接,升降管的上端与升降杆插接配合。
11.所述第二固定环为方形环,插接杆为方形杆。
12.本实用新型的优点在于:本实用新型能够方便工人无需踩着人字梯,只需要站在地面上操作升降装置,从而带动插接杆和第二固定环插接配合,从而在需要将变电站 gis设备带电检测机器人从管道上取下时能够让工人能够更加方便地操作。当需要将变电站gis设备带电检测机器人从管道上取下时,工人可以将推车推到变电站gis设备带电检测机器人下方,工人手动操作升降装置使与第二固定环插接配合,然后变电站gis设备带电检测机器人转换到与管道脱离状态,使用者手动操作升降装置将变电站gis设备带电检测机器人取下,在操作过程中万一出现第二固定环和插接杆脱离的情况,网兜可以将掉落的变电站gis设备带电检测机器人接住,从而避免变电站gis 设备带电检测机器人摔坏。本公司采用本技术制作的装置,大幅降低了变电站gis设备带电检测机器人摔坏的几率。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
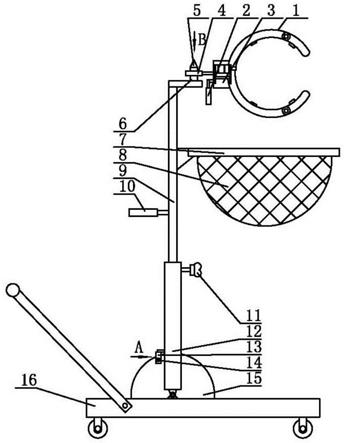
14.图1为本实用新型的结构示意图之一;
15.图2为图1的a向放大结构示意图;
16.图3为图1的b向放大结构示意图;
17.图4为本实用新型的结构示意图之二。
18.标注部件:1变电站gis设备带电检测机器人 2第一固定环 3控制箱 4第二固定环 5尖端 6插接杆 7网兜固定环 8网兜 9升降杆 10把手 11第一螺栓 12升降管 13u形板
ꢀꢀ
14第二螺栓 15半圆形板 16推车。
具体实施方式
19.以下结合附图对本实用新型的优选实施例进行说明。
20.实施例1:
21.超、特高压变电站gis设备带电检测机器人,如图1
‑
图4所示,包括变电站 gis设备带电检测机器人1和推车16,变电站gis设备带电检测机器人1的一侧具有控制箱3,所述控制箱3的外侧连接第二固定环4,推车16的上部安装升降装置,升降装置的固定端与推车16配合,升降装置的升降端部连接插接杆6,插接杆6的上端连接尖端5,尖端5能够与第二固定环4插接配合,升降装置的升降端侧部安装网兜 8,网兜8位于插接杆6的下方。
22.本实用新型能够方便工人无需踩着人字梯,只需要站在地面上操作升降装置,从而带动插接杆6和第二固定环4插接配合,从而在需要将变电站gis设备带电检测机器人1从管道上取下时能够让工人能够更加方便地操作。当需要将变电站gis设备带电检测机器人1从管道上取下时,工人可以将推车16推到变电站gis设备带电检测机器人1下方,工人手动操作升降装置使6与第二固定环4插接配合,然后变电站gis 设备带电检测机器人1转换到与管道脱离状态,使用者手动操作升降装置将变电站 gis设备带电检测机器人1取下,在操作过程中万一出现第二固定环4和插接杆6脱离的情况,网兜8可以将掉落的变电站gis设备
带电检测机器人1接住,从而避免变电站gis设备带电检测机器人1摔坏。本公司采用本技术制作的装置,大幅降低了变电站gis设备带电检测机器人1摔坏的几率。
23.实施例2:
24.所述升降装置包括升降管12,升降管12为下端封口的管状壳体,升降管12的下端为升降装置的固定端,升降管12的下端与推车16的上部铰接,升降管12的上端插接升降杆9,升降杆9为杆状结构,升降杆9能够在升降管12的内部滑动,升降杆 9的上端为升降装置的升降端,升降管12的侧部开设螺孔,升降管12通过螺孔螺纹连接第一螺栓11,第一螺栓11的丝杆端部能够与升降杆9的侧部配合,第一螺栓11 能够将升降杆9和升降管12锁定,升降杆9的侧部连接网兜固定环7,网兜固定环7 的下部安装网兜8,网兜8为上部开口的纤维网制成的壳体结构,网兜8的开口侧周与网兜固定环7的侧周连接,网兜固定环7使网兜8的上部开口保持打开状态,推车 16的上部连接半圆形板15,半圆形板15为半圆形的板状结构,升降管12的侧部连接u形板13,u形板13位u形的板状结构,u形板13能够套在半圆形板15上个,u 形板13的一侧开设螺孔,u形板13能够通过螺孔螺纹连接第二螺栓14,第二螺栓14 能够与u形板13的一侧配合夹住半圆形板15。
25.本实用新型的升降装置可以通过调节升降杆9探出升降管12的长度从而调节升降装置的总长度,本实用新型的升降管12可以沿着与推车16的铰接轴转动,从而调节升降装置的角度,二者结合能够方便使用者调节尖端5到合适的位置,从而方便插接杆6与第二固定环4插接配合,从而方便将变电站gis设备带电检测机器人1从管道上取下。本实用新型的第二螺栓14与u形板13的一侧配合夹住半圆形板15能够在升降管12调节到合适的倾角后将升降管12和半圆形板15锁定。本实施例实际操作时,先调节升降装置的高度和角度,使第二固定环4和插接杆6插接配合,然后使用第一螺栓11将升降杆9和升降管12锁定、使用第二螺栓14和u形板13将升降管 12和半圆形板15锁定,然后使变电站gis设备带电检测机器人1转换至打开状态,然后推动推车16,使变电站gis设备带电检测机器人1和管道分离。
26.实施例3:
27.所述升降杆9的侧部连接把手10。
28.本实用新型的把手10可以方便使用者推动该升降杆9升降。
29.实施例4:
30.所述控制箱3的侧部连接第一固定环2,第二固定环4的中心轴与第一固定环2 的中心轴相互垂直。
31.本实用新型的第一固定环2,第二固定环4的中心轴与第一固定环2的中心轴相互垂直可以方便在控制箱3位于管道下方时,插接杆6与第一固定环2插接配合。
32.实施例5:
33.所述网兜8上部开口面积可以设置为两平方米。
34.本实用新型的网兜8上部开口面积设置为两平方米在我们实际测试中,能够使网兜8有效接住不慎掉落的变电站gis设备带电检测机器人1。
35.实施例6:
36.所述升降装置包括升降杆9和升降管12,升降管12的下端与推车16连接,升降管12的上端与升降杆9插接配合。
37.本实用新型的升降装置可以在需要将插接杆6与第二固定环4插接配合时,方便工
人将升降杆9从升降管12上拔下,从而手动控升降杆9升降,进而控制插接杆6 与第二固定环4插接配合。
38.实施例7:
39.所述第二固定环4为方形环,插接杆6为方形杆。
40.本实用新型的第二固定环4为方形环,插接杆6为方形杆。能够避免第二固定环4和插接杆6插接配合后,变电站gis设备带电检测机器人1产生以插接杆6中心轴为转轴旋转。
41.适用范围具体实施的选材和可行性分析:我们实际制作的样品以说明书附图作为图纸,按照说明书附图中各个部件的比例和配合方式实施,所述的连接为强力胶黏剂连接焊接铆接法兰连接一体成型式连接等常用的连接方式,实际制作时可以根据实际连接强度需要无需创造性的选择对应的连接方式、连接点的厚度和强度。本实用新型的的变电站gis设备带电检测机器人1可以采用授权公告号cn206960956u公开了变电站gis设备带电检测机器人,其中变电站gis设备带电检测机器人具备控制箱,本技术在控制箱上焊接第二固定环4和第一固定环2。网兜8采用凯夫拉纤维制成具备足够的承接变电站gis设备带电检测机器人1的强度。
42.实施过程中遇到的问题及解决方法表:
43.[0044][0045]
本技术与现有技术测试效果对比表(每拆卸变电站gis设备带电检测机器人20次、变电站gis设备带电检测机器人(1)掉落到地面上的次数):
[0046][0047]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1