一种用于电法勘探的自动勘探车
1.本实用新型涉及地质勘探技术领域,尤其涉及一种用于电法勘探的自动勘探车。
背景技术:
2.电法勘探是地质调查与研究的一种重要方法。在实际操作过程中,由于电极之间距离较大、勘探环境较为恶劣,导致勘察人员体力消耗较大,复杂环境下户外工作危险系数,加重了相关行业人员的从业负担。
技术实现要素:
3.本实用新型的目的在于,针对现有技术的上述不足,提出一种用于电法勘探的自动勘探车。
4.本实用新型的一种用于电法勘探的自动勘探车,包括车体和设置在所述车体上的视觉辅助装置、供电装置、控制装置、两个供电电极、至少一个测量电极和至少三个电极下放装置;所述电极下放装置与所述供电电极和测量电极一一对应,以将所述供电电极和测量电极插入土壤中,两个所述供电电极和控制装置通过线缆与所述供电装置电连接,所述测量电极、电极下放装置、视觉辅助装置和车体均与所述控制装置电连接。
5.进一步的,所述自动勘探车还包括线缆收放组件,所述线缆收放组件包括两个线缆盘和两个第一电机,每个所述第一电机与一个所述线缆盘的中心轴传动连接,两股线缆分别绕在所述线缆盘上,两股线缆的一端分别与两个所述供电电极连接,另一端均与供电装置连接。
6.进一步的,所述线缆收放组件还包括壳体,两个所述线缆盘和两个第一电机均设置在所述壳体内,所述壳体上设有两个穿线孔,两股线缆的两端分别由所述穿线孔伸出壳体与所述供电电极和供电装置连接。
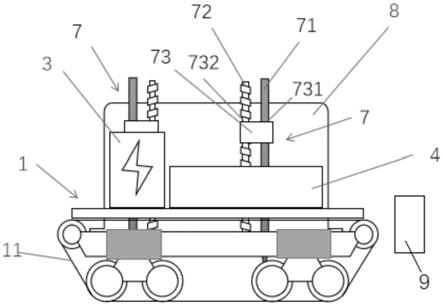
7.进一步的,所述电极下放装置包括固定杆、螺杆、滑动座、电动抓爪和驱动器,所述固定杆和螺杆竖直设置在所述车体上,所述滑动座上设有贯穿其的滑动孔和螺纹孔,所述滑动座由所述滑动孔套设在所述固定杆外,由所述螺纹孔套设在所述螺杆外,所述驱动器设置在所述车体上,且与所述螺杆的底端传动连接,以驱动所述螺杆顺时针和逆时针转动。
8.进一步的,所述驱动器包括第二电机,所述第二电机的驱动端与所述螺杆传动连接。
9.进一步的,所述视觉辅助装置包括摄像头和摄像头支架,所述摄像头通过摄像头支架安装在所述车体上。
10.进一步的,所述摄像头通过转动机构可转动的设置在所述摄像头支架。
11.进一步的,所述车体包括履带车轮。
12.进一步的,所述自动勘探车还包括远程遥控器,所述远程遥控器与所述控制装置通讯连接。
13.本实用新型的一种用于电法勘探的自动勘探车勘探流程如下:
14.供电电极在勘测时插入土壤中不跟随车体移动,供电电极与线缆相连,测量电极为移动电极,勘探时随车体移动。
15.勘探时,控制装置先控制一个电极下探装置先将一个供电电极下插入土壤中,插入指定深度后电极下探装置松开,车体行驶至勘探目标区域终点后,控制装置控制一个电极下探装置先将另一个供电电极下插入土壤中,插入指定深度后电极下探装置松开,供电装置向两个供电电极供电,建立地下电场,这时,车体在该区域继续行驶,停靠在任一想检测的位置,然后插入测量电极,将测量电极检测到的信号传输至控制装置,控制装置存储或\和传输数据至终端,勘探作业完成。
16.本实用新型的一种用于电法勘探的自动勘探车可适应大部分勘探地形,能够自动完成或通过遥控完成电极的插放、线缆的布设等工作,解决了人工作业劳动量较大的问题。
附图说明
17.图1为本实用新型的一种用于电法勘探的自动勘探车的结构示意图;
18.图2为本实用新型的一种用于电法勘探的自动勘探车的另一个角度的结构示意图;
19.图3为本实用新型的线缆收放组件的结构示意图;
20.图4为本实用新型的线缆收放组件的第一电机结构示意图;
21.图5为本实用新型的电动抓爪和供电电极的结构示意图;
22.图6为本实用新型的电动抓爪和测量电极的结构示意图。
23.1、车体;11、履带车轮;2、视觉辅助装置;21、摄像头;22、摄像头支架;23、转动机构;3、供电装置;4、控制装置;5、供电电极;6、测量电极;7、电极下放装置;71、固定杆;72、螺杆;73、滑动座;731、滑动孔;732、螺纹孔;74、电动抓爪;75、驱动器;751、第二电机;8、线缆收放组件;81、线缆盘;82、第一电机;83、壳体;831、穿线孔;9、远程遥控器。
具体实施方式
24.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
25.如图1和2所示,本实用新型的一种用于电法勘探的自动勘探车,包括车体1和设置在车体1上的视觉辅助装置2、供电装置3、控制装置4、两个供电电极5、至少一个测量电极6和至少三个电极下放装置7;电极下放装置7与供电电极5和测量电极6一一对应,以将供电电极5和测量电极6插入土壤中,两个供电电极5和控制装置4通过线缆与供电装置3电连接,测量电极6、电极下放装置7、视觉辅助装置2和车体1均与控制装置4电连接。
26.本实用新型的一种用于电法勘探的自动勘探车勘探流程如下:
27.供电电极5在勘测时插入土壤中不跟随车体1移动,供电电极5与线缆相连,测量电极6为移动电极,勘探时随车体1移动。
28.勘探时,控制装置4控制先一个电极下探装置先将一个供电电极5下插入土壤中,插入指定深度后电极下探装置松开,车体1行驶至勘探目标区域终点后,控制装置4控制一个电极下探装置先将另一个供电电极5下插入土壤中,插入指定深度后电极下探装置松开,供电装置3向两个供电电极5供电,使得该土壤区域带电,这时,车体1在该区域继续行驶,停
靠在任一想检测的位置,然后插入测量电极6,将测量电极6检测到的信号传输至控制装置4,控制装置4存储或\和传输数据至终端,勘探作业完成。
29.本实用新型的一种用于电法勘探的自动勘探车可适应大部分勘探地形,能够自动完成或通过遥控完成电极的插放、线缆的布设等工作,解决了人工作业劳动量较大的问题。
30.如图3和4所述,自动勘探车还可以包括线缆收放组件8,线缆收放组件8包括两个线缆盘81和两个第一电机82,每个第一电机82与一个线缆盘81的中心轴传动连接,两股线缆分别绕在线缆盘81上,两股线缆的一端分别与两个供电电极5连接,另一端均与供电装置3连接,第一电机82 驱动线缆盘81转动。
31.在插设供电电极5的过程中,将两个供电电极5所插设的位置一个设定为前方,一个设定位后方,
32.勘探时,一个电极下探装置先将一个供电电极5下插入土壤中,插入指定深度后松开,车体1向前移动,一个线缆盘81保持不动,另一个线缆盘81以特定速度顺时针转动,释放另一个线缆盘81上的线缆;车体1行驶至勘探目标区域终点后,另一个电极下探装置将另一个供电电极5下插入土壤中插入指定深度后松开;随后视觉辅助装置2转向,摄像头21对准后方区域,车体1准备向后行使;向后行驶过程中,两个线缆盘81同时逆时针旋转,在释放一个线缆盘81的线缆同时回收另一个线缆盘81的线缆;此外,在反向行驶过程中,每经过一段固定距离,车体1停顿一段时间,在该段时间内,电极下探装置将测量电极6下放到土壤中进行数据采集,采集完成后将测量电极6提起,继续反向行驶至下一采集点;完成所有点位的采集后,行驶至一个供电电极5,将供电电极5提起,向前行驶;向前行驶过程中,另一个电缆盘保持不动,一个线缆盘81顺时针旋转,回收线缆,直至行驶至另一个供电电极5处完成另一个供电电极5的上提动作,勘探作业完成。
33.线缆收放组件8还可以包括壳体83,两个线缆盘81和两个第一电机82均设置在壳体83内,壳体83上设有两个穿线孔831,两股线缆的两端分别由穿线孔831伸出壳体83与供电电极5和供电装置3连接,壳体83 保护线缆。
34.如图1和2所示电极下放装置7的结构有多种,在这里不做限定,在本实施例中,电极下放装置7可以包括固定杆71、螺杆72、滑动座73、电动抓爪74和驱动器75,固定杆71和螺杆72竖直设置在车体1上,滑动座 73上设有贯穿其的滑动孔731和螺纹孔732,滑动座73由滑动孔731套设在固定杆71外,由螺纹孔732套设在螺杆72外,驱动器75设置在车体1 上,且与螺杆72的底端传动连接,以驱动螺杆72顺时针和逆时针转动。
35.如图5和6所示,在下插电极时,电动抓爪74抓住供电电极5或测量电极6,驱动器75带动螺杆72动,使得电动抓爪74下移,实现供电电极 5或测量电极6的垂直下插,在本实施例中,电极下放装置7共有四组,以矩形排列。
36.驱动器75的结构有多种,在这里不做限定,在本实施例中,驱动器75 可以包括第二电机751,第二电机751的驱动端与螺杆72传动连接,第二电机751驱动螺杆72正反转动。
37.视觉辅助装置2的结构有多种,在这里不做限定,在本实施例中,视觉辅助装置2可以包括摄像头21和摄像头支架22,摄像头21通过摄像头支架22安装在车体1上。
38.摄像头21可以通过转动机构23可转动的设置在摄像头支架22。实现其360度旋转,更为清楚的采集周边地形信息。
39.车体1可以包括履带车轮11,使得车体1在行驶的过程中更为稳健。履带车轮11可
以车轮、履带、第三电机和底盘。第三电机固定在底盘上,与车轮直接连接或通过减速齿轮与车轮间接连接,车轮带动履带转动。工作时,第三电机转动直接或间接带动车轮转动,随后带动履带转动,实现履带车的前进与后退;通过两侧履带转动时的速度差实现履带车的转向,底盘上可以安装操作台,其他装置均安装在操作台上。
40.自动勘探车还可以包括远程遥控器9,远程遥控器9与控制装置4通讯连接。上述执行过程可通过远程遥控器9实现,也可根据gps、北斗等导航信息结合已有的地理信息自动完成,其通讯与定位所需的天线集成于控制装置4内测或外侧,也可通过接口外接天线。
41.其中,供电装置3包括大功率电池及其保护电路,控制装置4包括主控芯片及其外围电路,还包括一些信号调理电路与功率电路等。
42.以上未涉及之处,适用于现有技术。
43.虽然已经通过示例对本实用新型的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本实用新型的范围,本实用新型所属技术领域的技术人员可以对所描述的具体实施例来做出各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的方向或者超越所附权利要求书所定义的范围。本领域的技术人员应该理解,凡是依据本实用新型的技术实质对以上实施方式所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1