一种割草机器人障碍传感器性能检测设备的制作方法
1.本实用新型涉及传感器检测设备领域,具体涉及一种割草机器人障碍传感器性能检测设备。
背景技术:
2.随着割草机器人应用越来越广泛,对割草机器人的使用安全性要求也越来越高,其中包括对障碍物体的探测。要求割草机器人必须配备障碍传感器,但不限于电子式或机械式。为了检测障碍传感器的可靠性,需要本装置进行检测割草机器人能否感应到障碍,并及时停止行进与刀片运转,以及在障碍传感器失效的情况下碰撞到障碍物体时,在碰撞后0.5s内其撞击力不超过260n。
3.现有检测装置多采用活塞套筒式,其中弹簧及压力传感器内置于套筒内,此种方式不足之处在于:套筒体积较大,因此质量大,运动惯量大影响测试准确度;套筒结构加工复杂,加工精度要求高,因此加工成本高,周期长,且套筒的滑动摩擦系数大,影响测试精度及一致性;由于摩擦接触,压力传感器无法归零,较难消除套筒偏摆误差。
技术实现要素:
4.本实用新型的目的是:提供一种割草机器人障碍传感器性能检测设备,结构简单可靠,测量精度高,重复性好,检测结果准确,且维护成本低。
5.为了实现上述目的,本实用新型提供如下的技术方案:一种割草机器人障碍传感器性能检测设备,具有底座,所述底座侧壁上设置有压力传感器和托板,所述托板的上端开有安装槽,所述安装槽上设置有滑轨,所述滑轨上可滑动连接有滑块,所述滑块的左端设置有圆盘,所述圆盘的右端面和压力传感器的感应端分别设置有第一导柱和第二导柱,所述第一导柱和第二导柱间隔设置,且所述第一导柱和第二导柱之间套设有弹簧。
6.进一步的,所述压力传感器位于托板正上方,所述圆盘、压力传感器、第一导柱、第二导柱和弹簧同轴设置。
7.进一步的,所述托板上端位于安装槽左侧设置有矩形凸起,所述压力传感器和托板均与底座螺纹连接,所述滑轨与托板螺纹连接。
8.进一步的,所述圆盘与滑块螺纹连接,所述第一导柱与圆盘螺纹连接,所述第二导柱与压力传感器的感应端固定连接。
9.本实用新型的有益效果为:通过底座、压力传感器、托板、安装槽、滑轨、滑块、圆盘、第一导柱、第二导柱和弹簧的配合使用,提高测量精度,保证检测结果准确,结构简单可靠,且维护成本低。
附图说明
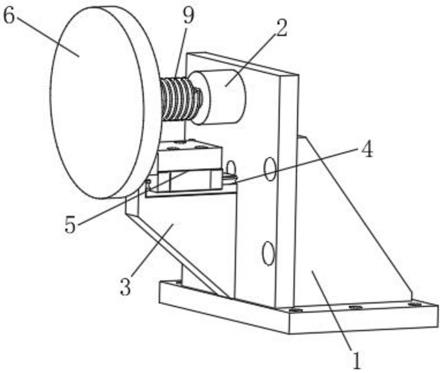
10.图1为本实用新型一种割草机器人障碍传感器性能检测设备的第一视角示意图;
11.图2为本实用新型一种割草机器人障碍传感器性能检测设备的第二视角示意图;
12.图3为本实用新型一种割草机器人障碍传感器性能检测设备的爆炸示意图。
13.图中:1、底座;2、压力传感器;3、托板;301、安装槽;4、滑轨;5、滑块;6、圆盘;7、第一导柱;8、第二导柱;9、弹簧。
具体实施方式
14.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
15.参考图1
‑
图3所示的一种割草机器人障碍传感器性能检测设备,具有底座1,所述底座1侧壁上设置有压力传感器2和托板3,所述托板3的上端开有安装槽301,所述安装槽301上设置有滑轨4,所述滑轨4上可滑动连接有滑块5,所述滑块5的左端设置有圆盘6,所述圆盘6的右端面和压力传感器2的感应端分别设置有第一导柱7和第二导柱8,所述第一导柱7和第二导柱8间隔设置,且所述第一导柱7和第二导柱8之间套设有弹簧9。
16.所述压力传感器2位于托板3正上方,所述圆盘6、压力传感器2、第一导柱7、第二导柱8和弹簧9同轴设置。
17.所述托板3上端位于安装槽301左侧设置有矩形凸起,所述压力传感器2和托板3均与底座1螺纹连接,所述滑轨4与托板3螺纹连接。
18.所述圆盘6与滑块5螺纹连接,所述第一导柱7与圆盘6螺纹连接,所述第二导柱8与压力传感器2的感应端固定连接。
19.本实用新型的工作原理是:
20.将活塞套筒式结构改为圆盘6、滑轨4和滑块5的形式,不仅降低了本装置整体质量、惯量以及摩擦力,且可以保证割草机器人在碰撞试验过程中力的垂直度及方向性,提高本装置使用寿命。
21.通过将弹簧9外置,与压力传感器2通过第一导柱7和第二导柱8进行连接,弹9簧与压力传感器2相对无紧密接触,从而保证压力传感器2可以达到归零状态,降低测量误差。
22.本装置除了滑轨4和滑块5其余配件不需要维护,必要时只需更换一组滑轨4和滑块即可保证装置的精度,因此维护成本低,维护方便。
23.工作流程:
24.在进行割草机器人障碍传感器测试时,将本装置固定在棕榈地毯上,将割草机器人置于离本装置3倍于其本身(割草机器人)长度的位置,然后启动割草机器人,使其朝向本装置运动并撞向圆盘6,首先测试割草机器人的障碍传感器是否能感应到圆盘6并停止行进与刀片运转,若割草机器人能够及时停止行进和刀片运转即为合格;测试障碍传感器失效的情况下碰撞圆盘6时,再次重复上述操作,割草机器人在碰撞后0.5s内其撞击力不超过260n即为合格,在测试过程中,撞击力通过圆盘6、第一导柱7、弹簧9和第二导柱8传递到压力传感器2,压力传感器2检测到的数据由外部计算机记录检测即可。
25.上述实施例用于对本实用新型作进一步的说明,但并不将本实用新型局限于这些具体实施方式。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应理解为在本实用新型的保护范围之内。
技术特征:
1.一种割草机器人障碍传感器性能检测设备,其特征在于:具有底座(1),所述底座(1)侧壁上设置有压力传感器(2)和托板(3),所述托板(3)的上端开有安装槽(301),所述安装槽(301)上设置有滑轨(4),所述滑轨(4)上可滑动连接有滑块(5),所述滑块(5)的左端设置有圆盘(6),所述圆盘(6)的右端面和压力传感器(2)的感应端分别设置有第一导柱(7)和第二导柱(8),所述第一导柱(7)和第二导柱(8)间隔设置,且所述第一导柱(7)和第二导柱(8)之间套设有弹簧(9)。2.根据权利要求1所述的一种割草机器人障碍传感器性能检测设备,其特征在于:所述压力传感器(2)位于托板(3)正上方,所述圆盘(6)、压力传感器(2)、第一导柱(7)、第二导柱(8)和弹簧(9)同轴设置。3.根据权利要求1所述的一种割草机器人障碍传感器性能检测设备,其特征在于:所述托板(3)上端位于安装槽(301)左侧设置有矩形凸起,所述压力传感器(2)和托板(3)均与底座(1)螺纹连接,所述滑轨(4)与托板(3)螺纹连接。4.根据权利要求1所述的一种割草机器人障碍传感器性能检测设备,其特征在于:所述圆盘(6)与滑块(5)螺纹连接,所述第一导柱(7)与圆盘(6)螺纹连接,所述第二导柱(8)与压力传感器(2)的感应端固定连接。
技术总结
本实用新型涉及一种割草机器人障碍传感器性能检测设备,具有底座,所述底座侧壁上设置有压力传感器和托板,所述托板的上端开有安装槽,所述安装槽上设置有滑轨,所述滑轨上可滑动连接有滑块,所述滑块的左端设置有圆盘,所述圆盘的右端面和压力传感器的感应端分别设置有第一导柱和第二导柱,所述第一导柱和第二导柱间隔设置,且所述第一导柱和第二导柱之间套设有弹簧。本实用新型的有益效果为:提高测量精度,保证检测结果准确,结构简单可靠,且维护成本低。维护成本低。维护成本低。
技术研发人员:刘坤 朱保岭
受保护的技术使用者:昆山保文自动化设备有限公司
技术研发日:2021.03.16
技术公布日:2021/11/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1