一种倾斜柱体棱镜扫描装置的制作方法
1.本实用新型涉及激光扫描技术领域,具体涉及一种倾斜柱体棱镜扫描装置。
背景技术:
2.线扫型激光雷达的视场角一般为360度,应用于机载场景进行管道巡查、廊道测图或电力巡线等带状目标测绘时,若探测目标位于激光雷达的侧方或下方的扇形区域,导致多数扫描线被浪费,同时目标区域的扫描线稀疏。对此,近年来业内提出了多种适配机载应用的激光雷达扫描方式,旨在将线扫型激光雷达的扫描视场从360度压缩至合适的角度,从而增加中心视场的扫描线数,提高目标区域的扫描效率和点云密度。其中,塔镜扫描、楔形平面反射镜扫描和振镜扫描是最具代表性的三种方式。
3.塔镜扫描是控制塔镜在电机的驱动下做高速旋转,其工作面为沿圆周方向分布的若干个斜切面。出射激光在工作面上发生反射,光路偏转后指向目标方向。一个完整的工作面掠过出射光后,激光脚点在目标上的轨迹呈现为一段弧线。该方案是目前应用较为广泛的一种技术路线,但存在以下问题:1.塔镜的加工制造难度较大,成本较高;2.在同等通光孔径下,塔镜的体积、重量及转动惯量较大,从而增加了激光雷达整机的重量和功耗;3.整机装配过程中,需要对塔镜所有工作面的制造及装配几何误差进行检定,产生较大的检定工作量,降低了生产效率。
4.楔形反射镜扫描是将楔形反射镜的工作面为一楔形平面,该工作面与其旋转轴呈一定的夹角。出射激光在工作面上反射后指向目标方向。楔形反射镜回转整圈后,激光脚点在目标上的轨迹呈现为一椭圆。通过调整楔形反射镜的楔角,以及旋转轴与光轴的夹角,可以缩放其扫描视场,并改变椭圆的长短轴。楔形反射镜扫描的技术缺陷在于:1.电机的恒定转速驱动下楔形工作面反射的光斑脚点在目标上分布不均匀,两侧点云致密,中间点云稀疏;2.在载体行进过程中,同一个目标物会被探测到2次,由于pos误差及系统标定误差,两次探测会导致数据成果产生厘米级的平面误差和高程误差,使点云产生分层现象。
5.振镜扫描是将振镜的工作面为一平面,该工作面与其旋转轴呈45度夹角,振镜的旋转轴与出射光光轴重合。振镜在伺服电机的驱动下做往复摆动,通过调整伺服电机的摆动角度可以灵活地缩放其扫描视场。出射光经振镜反射后,激光脚点在目标上的轨迹呈现为z字形。振镜扫描是最直接的技术路线,但这种方案需要将驱动器从常规的直流电机更换为伺服电机,导致以下问题:1.伺服电机及伺服驱动器功耗大,频繁的加速和刹车会消耗大量的电能并产生热量;2.为保证足够的扭矩,增加电机的重量和体积,不利于装备的小型化和轻量化;3.现有技术条件下,伺服电机的摆动频率最高只能达到几十赫兹,限制了振镜的扫描频率;4.电机转速时刻变化,而出射光的频率不变,导致点云的分布不均匀,影响数据质量。
技术实现要素:
6.本实用新型的目的在于提供一种倾斜柱体棱镜扫描装置,匹配同轴布局的发射天
线和接收天线,形成一种面向机载应用的激光雷达系统光学方案。本方案综合优化了几种现有技术状态存在的缺点或不足,在制造难度、成本、体积重量、功耗及扫描轨迹的形状和均匀性等方面达到了平衡。
7.为实现上述目的,本实用新型采用以下技术方案:本实用新型提供了一种倾斜柱体棱镜扫描装置,包括:棱镜总成;所述棱镜总成包括多面棱镜、旋转轴、固定轴及固定基座;多面棱镜的镜面为扫描装置的工作面,固定基座为系统光学器件的刚性支撑结构,用于支撑固定轴;固定轴套置于旋转轴内,旋转轴套置于多面棱镜内;
8.棱镜总成一侧设置一准直镜,作为工作光的发射天线;准直镜连接一聚光镜,聚光镜的焦点位置设置一探测器,聚光镜和探测器作为工作光的接收天线;发射天线和接收天线的光轴设置为同轴;
9.其中,出射的脉冲激光经准直镜准直后,到达棱镜总成的工作面,经棱镜工作面反射后指向被测目标;被测目标反射光再次经棱镜工作面反射,反射后的平行光到达聚光镜的入射面,在聚光镜内部产生折射,最终汇聚至聚光镜焦点处的探测器。
10.其中,棱镜总成的工作面与棱镜旋转轴设置为平行,棱镜总成的旋转轴与出射光的光轴呈10
‑
80度夹角,优选设置为45度。
11.其中,棱镜总成的旋转轴通过一旋转电机控制进行旋转,且所述旋转电机为外转子旋转电机。
12.其中,外转子旋转电机包括:电机定子,所述电机定子呈纺锤状,两端分别套置上端轴承和下端轴承,上端轴承和下端轴承之间自内而外依次设置电机绕组、磁钢及电机转子;其中,磁钢固定设置于电机转子的内壁,电机绕组固定设置于电机定子外侧;电机转子外侧包覆设置多面棱镜。
13.其中,磁钢为永磁体,通过铆接或粘接的方式固定于电机转子内壁;电机绕组固定在电机定子上,通电后产生交变磁场,驱动磁钢及电机转子进行圆周运动。
14.其中,电机转子为一框架型结构,其作为电机转子的同时,又充当了多面棱镜的固定基座;且多个平面反射镜依序边缘连接形成多面棱镜。
15.其中,多面棱镜为3面、4面、5面、6面或者更多面的棱镜。
16.其中,多面棱镜的工作面是通过在电机转子的侧壁上直接加工而成,在电机转子侧面上直接加工出工作面并镀金属膜。
17.其中,采用多片玻璃基底的平面反射镜作为扫描镜,通过粘接的方式固定至金属框架侧面的安装位上,随着电机转子一起旋转。
18.相比现有的各类技术方案,本实用新型存在以下优点:
19.1.相比应用较为广泛的塔镜扫描方案,本实用新型的扫描镜为常规的棱柱结构,其结构简单,尺寸精度容易达到,且成本可控;同时,在同等通光孔径前提下,电机转子体积和转动惯量较小,优化了系统的尺寸和功耗;
20.2.相比楔形反射镜扫描方案,本实用新型的激光脚点轨迹左右对称、分布均匀,且对每个目标仅扫描一次,不会产生分层,优化了点云的数据质量;
21.3.相比振镜扫描方案,本实用新型的电机仍然采用常规的直流电机,电机只需要做简单的圆周运动,电机力矩小、驱动简单,且电机和驱动器的功耗和体积均优于振镜扫描方案;
22.4.本实用新型采用外转子电机,将电机转子与平面反射镜的安装框架一体化,电机的电枢置于扫描镜内部,大大优化了扫描装置的系统布局,节省了轴向尺寸。同时,优化了电机定子的受力环境;
23.5.本实用新型采用四片玻璃基底的平面反射镜作为扫描镜,通过粘接的方式固定至金属框架侧面的安装位上。其优点在于,玻璃平面镜的加工简单,成本较低,其面形和镀膜质量容易保证,且反射率高。
附图说明
24.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
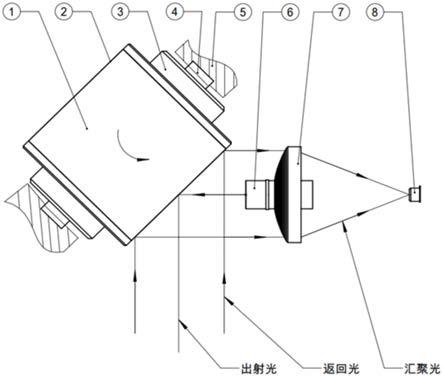
25.图1是本实用新型提供的一种倾斜柱体棱镜扫描装置的结构示意图。
26.图2是本实用新型提供的一种倾斜柱体棱镜扫描装置的俯视示意图。
27.图3是本实用新型提供的一种倾斜柱体棱镜扫描装置的侧视示意图。
28.图4是本实用新型提供的一种倾斜柱体棱镜扫描装置的扫描轨迹点坐标曲线示意图。
29.图5是本实用新型提供的一种倾斜柱体棱镜扫描装置中旋转电机的剖视示意图。
30.图6是本实用新型提供的一种倾斜柱体棱镜扫描装置中旋转电机的俯视示意图。
31.图7是本实用新型提供的一种倾斜柱体棱镜扫描装置中发射天线与接收天线旁置布置的结构示意图。
具体实施方式
32.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。
33.如图1所示,本实用新型提供了一种倾斜柱体棱镜扫描装置,包括:棱镜总成1;棱镜总成1包括多面棱镜2、旋转轴3、固定轴4及固定基座5;多面棱镜2的镜面为扫描装置的工作面,固定基座5为系统光学器件的刚性支撑结构,用于支撑固定轴4;固定轴4套置于旋转轴3内,旋转轴3套置于多面棱镜2内;
34.棱镜总成1一侧设置一准直镜6,作为工作光的发射天线;准直镜6连接一聚光镜7,聚光镜7的焦点位置设置一探测器8,探测器8用于接收聚光镜7的汇聚光信号并转换为电信号,聚光镜7和探测器8作为工作光的接收天线;发射天线和接收天线的光轴设置为同轴;
35.其中,出射的脉冲激光经准直镜6准直后,到达棱镜总成1的工作面,经棱镜工作面反射后指向被测目标;被测目标反射光再次经棱镜工作面反射,反射后的平行光到达聚光镜7的入射面,在聚光镜7内部产生折射,最终汇聚至聚光镜7焦点处的探测器8。
36.其中,棱镜总成1的工作面与棱镜旋转轴3设置为平行,棱镜总成1的旋转轴3与出射光的光轴呈10
‑
80度夹角,优选设置为45度。
37.其中,棱镜总成1的旋转轴3通过一旋转电机9控制进行选择,且所述旋转电机9为外转子旋转电机。
38.其中,外转子旋转电机包括:电机定子91,电机定子91呈纺锤状,两端分别套置上端轴承92和下端轴承96,上端轴承92和下端轴承96之间自内而外依次设置电机绕组94、磁钢93及电机转子97;其中,磁钢93固定设置于电机转子97的内壁,电机绕组94固定设置于电
机定子91外侧;电机转子97外侧包覆设置多面棱镜2。
39.其中,磁钢93为永磁体,通过铆接或粘接的方式固定于电机转子97内壁;电机绕组94固定在电机定子91上,通电后产生交变磁场,驱动磁钢93及电机转子97进行圆周运动。
40.其中,电机转子97为一框架型结构,其作为电机转子97的同时,又充当了多面棱镜2的固定基座;且多个平面反射镜依序边缘连接形成多面棱镜2。
41.其中,多面棱镜2为3面、4面、5面、6面或者更多面的棱镜。通过配置不同数量的工作面,可以调整多棱镜扫描的视场角。多棱镜的工作面以平面反射镜粘接方案进行。
42.其中,多面棱镜2的工作面是通过在电机转子97的侧壁上直接加工而成,在电机转子97侧面上直接加工出工作面并镀金属膜。省去了平面镜粘接的工艺过程。同时,棱镜在高速旋转时的可靠性也得到了保证。
43.本实用新型以四棱镜为例进行说明。
44.图1
‑
3中,1为四棱镜总成,2为四棱镜的工作面,该工作面为平面,该平面与四棱镜的旋转轴3平行。
45.本实用新型结构的优势在于:首先,发射天线和接收天线的光轴同轴,最大限度地节省了系统空间,有利于装置整体结构的小型化和轻量化;第二,棱镜的四个工作面与棱镜旋转轴平行,四棱镜总成是一个规则的长方体,这种棱镜结构加工简单、成本可控,同时降低了装置的几何标定难度和动平衡装调难度;第三,四棱镜的旋转轴与出射光的光轴呈45度夹角,当四棱镜旋转至左右对称状态时,工作光在棱镜工作面上的入射角为45度,此时工作光将被偏转90度。当四棱镜继续旋转时,入射角不断增大,当四棱镜的一个工作面完整地掠过出射光时,其投射到目标上的激光脚点轨迹呈现为一段弧形。
46.设准直镜6出射光轴到平面目标物的距离为200米,通过计算机模拟,本实用新型的激光脚点轨迹坐标如图4所示。图4中,y轴负方向与准直镜的出射光方向重合,x方向与y方向垂直,共同构成了目标平面。为显示方便,该轨迹点进行了抽稀处理,四棱镜每旋转3度给出一个采样点,并以
±
30度为界。表1给出了轨迹点的x、y坐标值。从图6和表1可见,本扫描方案在目标上的激光脚点为一段开口向下的抛物线,该抛物线左右对称,且分布均匀。在装备随飞机载体前进时,同一个目标点只会被采集一次,该轨迹效果适合作为机载激光点云数据。
[0047][0048][0049]
表1轨迹点坐标
[0050]
在现有的各类技术方案中,扫描镜与其驱动器相对孤立:驱动器通过输出轴与扫描镜相连.这种布局方式增加了系统的轴向尺寸,同时对输出轴的刚性提出了很高的要求。因为对现有的各类技术方案来说,扫描镜是一个远端负载,其质量负载及离心负载将通过输出轴的力臂对电机内部的支点形成弯矩,如果输出轴自身刚度不足,扫描镜的工作面与出射光轴之间的几何关系将发生变化,使系统内部几何参数的标定失去意义,并使最终数据测距误差。
[0051]
本实用新型中,将电机由常规的内转子电机改为外转子电机,同时将电机与四棱镜进行深度集成,电机的电枢布置在四棱镜内部,从而节省了系统空间,同时优化了电机输出轴的工况。其具体实现方案见图5。
[0052]
图5为四棱镜沿对称面的剖视图。图中,91为电机定子,其形态类似常规电机的转子,为一轴形零件。电机定子固定不动,其上下两端直接与系统基座5相连;92为上端轴承;93为电机磁钢,94为电机绕组,95为平面反射镜;96为下端轴承,该轴承可与上端轴承92为同一型号;97为电机转子。
[0053]
电机转子97为一框架型结构,其作为电机转子97的同时,又充当了平面反射镜95的固定基座。将电机的磁钢93和电机绕组94置于四棱镜的内部,大大节省了系统的轴向尺寸。同时,负载完全处于上下两端的轴承之间,负载力臂对比外置远端负载来说大大缩短,两个轴承均可对质量负载及离心负载进行可靠支撑,电机定子91的受力环境得到改善。图5仅用于解释本专利的实现原理,考虑到装配可行性,具体实现中需要对电机转子97进行轴
向拆分。拆分时,转子可沿轴向分为两段或三段,拆分后转子将至少含有一个端盖,端盖安装过程中,可同时对两侧轴承进行预紧,提高电机转子空间位置的稳定性。
[0054]
图5中,电机转子在其4个侧面预留了平面反射镜95的安装位。平面反射镜95通过粘接的方式直接镶嵌至电机转子97的安装位中。图6为电机转子与平面反射镜的横切断面图。
[0055]
本实用新型中,电机以集成在多棱镜内部的方案进行了描述。可替代地,也可以采用常规的电机外置方案,电机通过输出轴与多棱镜相连。电机可以布置在多棱镜的斜上方或斜下方。
[0056]
图6中,95为平面反射镜;97为电机转子。平面反射镜采用4片尺寸完全相同的矩形平面镜制作,均布于电机转子97四周。其基底为玻璃材质,两侧进行45度倒边。在其工作面上,可加镀工作光波段的介质反射膜,与常规的金属基底镀金属膜相比,其反射率更高(可超过99%),同时保证了膜层具有更好的损伤阈值及附着力。
[0057]
多面棱镜2的工作面与其旋转轴3是平行的。可替代地,多面棱镜2的工作面与其旋转轴3可以不平行,通过调整多面棱镜2的每一个工作面与其旋转轴3的夹角,使不同的工作面产生不同的扫描轨迹。多面棱镜2的工作面与其旋转轴3的夹角可以是0度到90度之间的任意度数。
[0058]
可替代地,系统的发射天线与接收天线可以为旁轴平行布置,见图7。旁轴布置可以减少发射天线对返回光的遮挡,提高系统的测距能力。
[0059]
上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1