一种手持式航向系统检测装置的制作方法
1.本实用新型涉及一种检测设备领域,尤其涉及一种手持式航向系统检测装置。
背景技术:
2.目前,直升机飞机定期检查时,对该型直升机航向系统进行原位功能和性性检查。现有技术的设备航向系统检测仪中,航向信号测量采用的是小功率随动系统,以机械式同步信号自整角机为核心。该检测仪中存在缺陷。
3.机械式同步器组成的小功率伺服系统由同步信号发送器、同步信号接收器、失调信号放大器、伺服电机及减速器的组成,该检测仪体积为450
×
350
×
280mm,体积大。由于该检测仪用于航向系统原位测试,驾驶室空间有限,只能将检测仪置于驾驶室舱门处,检查过程中,既要操作机上电门,观察机上仪表,又要观察检测仪的指示,操作不便。
技术实现要素:
4.为了克服现有技术的不足,本实用新型的目的之一在于提供一种手持式航向系统检测装置,以解决现有技术中的航向系统检测仪由于体积大导致操作不便的技术问题。
5.本实用新型的目的之一采用如下技术方案实现:
6.一种手持式航向系统检测装置,所述手持式航向系统检测装置包括:
7.信号接口电路,用于与外部航向系统电信号连接并接收航向系统输出模拟量航向信号;
8.角度数字转换器,与所述信号接口电路电信号连接,接收所述模拟量航向信号,并将所述模拟量航向信号转换为数字量航向信号;
9.主控制器,与所述角度数字转换器电信号连接,接收所述角度数字转换器发送的数字量航向信号,所述主控制器测试和处理所述数字量航向信号并输出检查结果。
10.可选地,所述手持航向系统检测仪还包括用于识别工作状态的控制电路,所述控制电路与所述信号接口电路电信号连接,用于接收并识别外部航向系统向所述信号接口电路输出的工作状态信号,所述控制电路还与所述主控制器电信号连接并将识别结果发送至所述主控制器。
11.可选地,所述手持航向系统检测仪还包括用于人机交互的交互模块;
12.所述主控制器与所述交互模块电信号连接,所述主控制器发送检查结果至所述交互模块。
13.可选地,所述交互模块为串口显示屏。
14.可选地,所述串口显示屏为触控串口显示屏。
15.可选地,所述手持式航向系统检测装置还包括壳体,所述壳体包括手持端和显示端;
16.所述串口显示屏设置于所述显示端。
17.可选地,所述角度数字转换器包括:
18.控制变压器,所述控制变压器与外部航向系统电信号连接,用于接收模拟量航向信号并对接收到的模拟量航向信号进行变压;
19.误差放大器,与所述控制变压器电信号连接,用于对模拟量航向信号进行放大;
20.相敏调节器,与所述误差放大器电信号连接,用于对模拟量航向信号进行相敏整流;
21.压控振荡器,与所述相敏调节器电信号连接,输出频率信号;
22.积分器,所述积分器的输入端与所述相敏调节器电信号连接,所述积分器的输出端与压控振荡器电信号连接;
23.可逆计数器,与所述压控振荡器电信号连接,对频率信号进行计数处理;
24.输出锁存器,与所述可逆计数器电信号连接,用于将频率信号转换为数字信号,并输出数字量航向信号。
25.可选地,所述手持式航向系统检测装置还包括电源电路,所述电源电路与所述信号接口电路、角度数字转换器及主控制器电信号连接以向所述信号接口电路、角度数字转换器及主控制器供电。
26.可选地,所述手持式航向系统检测装置还包括相序识别电路,所述相序识别电路与所述电源电路电信号连接用于对输入电源电路的三相交流电进行相序检测。
27.可选地,所述主控制器为stm32微控制器处理。
28.相比现有技术,本实用新型的有益效果在于:
29.本实用新型的手持式航向系统检测装置中,信号接口电路接收模拟量航向信号,角度数字转换器将模拟量航向信号转换为可以被主控制器识别的数字量航向信号,最后通过主控制器对数字量航向信号进行测试处理,从而获得检查结果,更重要的是本实施例中,采用高度集成化的角度数字转换器及主控制器,以角度数字转换器及主控制器作为手持式航向系统检测装置的核心部件,相比于机械式同步信号自整角机,具有更小的体积,具有更高的便携性,能够带入驾驶室对航向系统进行检测,操作更加方便。
附图说明
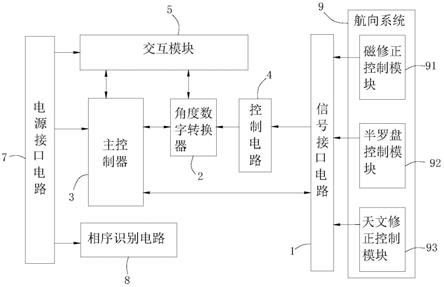
30.图1为本实用新型的手持式航向系统检测装置的模块示意图;
31.图2为本实用新型的手持式航向系统检测装置的工作原理示意图;
32.图3为本实用新型的手持式航向系统检测装置中的角度数字转换器的电路示意图;
33.图4为本实用新型的手持式航向系统检测装置中的信号采集和测试地原理图;
34.图5为本实用新型的手持式航向系统检测装置中的控制电路的电路示意图;
35.图6为本实用新型的手持式航向系统检测装置的外壳结构图。
36.图中:
37.1、信号接口电路;
38.2、角度数字转换器;21、控制变压器;22、误差放大器;23、相敏调节器;24、压控振荡器;25、积分器;26、可逆计数器;27、输出锁存器;
39.3、主控制器;4、控制电路;5、交互模块;51、串口显示屏;6、壳体;61、手持端;62、显示端;7、电源电路;8、相序识别电路;
40.9、航向系统;91、磁修正控制模块;92、半罗盘控制模块;93、天文修正控制模块。
具体实施方式
41.下面,结合附图1至附图6以及具体实施方式,对本实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
42.如图1、图2所示,本实用新型提供了一种手持式航向系统检测装置,手持式航向系统检测装置包括信号接口电路1、角度数字转换器2及主控制器3。其中信号接口电路1用于与外部航向系统9电信号连接,信号接口电路1接收航向系统9输出模拟量航向信号。角度数字转换器2与信号接口电路1电信号连接,接收从信号接口电路1发送过来的模拟量航向信号,并将模拟量航向信号转换为能够被主控制器3识别的数字量航向信号。主控制器3与角度数字转换器2电信号连接,主控制器3接收角度数字转换器2发送的数字量航向信号,主控制器3测试和处理数字量航向信号,从而获得检查结果,在用户需要使用检查结果时,主控制器3还能够输出检查结果。本实施例中,信号接口电路1接收模拟量航向信号,角度数字转换器2将模拟量航向信号转换为可以被主控制器3识别的数字量航向信号,最后通过主控制器3对数字量航向信号进行测试处理,从而获得检查结果,更重要的是本实施例中,采用高度集成化的角度数字转换器2及主控制器3,以角度数字转换器2及主控制器3作为手持式航向系统检测装置的核心部件,相比于机械式同步信号自整角机,具有更小的体积,具有更高的便携性,能够带入驾驶室对航向系统9进行检测,操作更加方便。
43.另外,以角度数字转换器2及主控制器3为核心部件,角度数字转换器2具有更高的航向信号采集精度,以主控制器3对航向信号进行测试处理,测试精度更高,提高了检测精度。
44.在一些实施例中,主控制器3为stm32微控制器处理。
45.如图1、图2及图4所示,航向系统9其内部具有多个辅助导航或者定位的模块,比如磁修正控制模块91、半罗盘控制模块92及天文修正控制模块93等,对应的也具有多种工作状态,比如半罗盘工作状态、磁修正工作状态及天文修正工作状态等。航向系统9处于不同的工作状态时,输出不同的工作状态信号,比如,在半罗盘工作状态下,半罗盘控制模块92输出半罗盘信号;在磁修正工作状态下,磁修正控制模块91输出快速修正信号;在天文修正工作状态下,天文修正控制模块93输出天文修正信号。因此,在对航向系统9进行检查时既要对航向信号进行检查,还需要对在不同工作状态进行识别,从而对工作状态信号进行处理,从而获得检测结果。在一些实施例中,为了对不同工作状态进行识别,手持航向系统9检测仪还包括用于识别工作状态的控制电路4,控制电路4与信号接口电路1电信号连接,用于接收并识别外部航向系统9向信号接口电路1输出的工作状态信号,控制电路4还与主控制器3电信号连接并将识别结果发送至主控制器3。通过设置控制电路4,控制电路4在接收到不同的工作状态下的信号时,能够线路切换线路,识别不同的工作状态信号,从而识别航向系统9的工作状态,经过处理后输出对应的识别结果至主控制器3。主控制器3根据接收到的工作状态信号,对航向信号、工作状态信号进行检测,从而实现对不同的工作状态进行检测。
46.具体来说,航向系统9主要工作状态是陀螺半罗盘工作状态,它通过航向陀螺的稳
定性来保证飞行方向必要的精度。另一种工作状态是磁校正工作状态,它通过感应式磁传感器输出与地磁场相对应的磁航向信号对航向陀螺进行校正。航向系统9中的陀螺机构,利用航向陀螺仪来稳定航向,并输出航向信号。在接收磁校正信号后,可稳定磁传感器所测定的航向,断开磁校正工作,以半罗盘状态工作时,可相对大圆圈平面保持方位稳定,以测定大圆圈航向。
47.测航向系统9的半罗盘工作状态主要测试航向角度和及半罗盘控制模块92输出的角度漂移量。在磁修正工作状态中需要测试航向角度和及磁修正控制模块91输出的磁修正工作速度。航向角度的采集由角度数字转换器2采集转换成数字量航向信号,并通主控制器3来测试处理。主控制器3接收控制电路4的识别结果,切换检测方式或者检测电路,从而对磁修正工作速度、角度漂移量进行检测。,最后由下文中的串口显示屏51显示出来。原理框图如图6所示。
48.对于前述控制电路4,其中一个实施例如图5所示,图中三个虚线框为三个识别电路,在控制电路4中,具有开关k3、开关k4及对应设置的电磁继电器,通过开关k3、开关k4及电磁继电器实现识别电路的切换。控制电路4通过前述三个识别电路识别不同的工作状态信号,并且通过接口pb1输出关于半罗盘工作状态的识别结果,接口pb2输出关于磁修正状态的识别结果,以及通过接口pb3输出关于天文修正工作状态的识别结果。
49.在一些实施例中,如图1所示,手持航向系统9检测仪还包括用于人机交互的交互模块5。
50.主控制器3与交互模块5电信号连接,主控制器3发送检查结果至交互模块5。通过交互模块5,输出或者显示测试结果,通过交互模块5输入操作指令,以控制手持式航向系统检测装置工作,从而提高使用的便利性。
51.在一些实施例中,交互模块5包括串口显示屏51、鼠标及键盘等。其中串口显示屏51可以是触控串口显示屏或者非触控串口显示屏,通过前述交互模块5,实现对交互界面的操作。键盘即可以是自己所设置的键盘,比如在手持端61设置实体键盘,也可以是触控串口显示屏中的虚拟键盘,还可以是外接的接口键盘。
52.在一些实施例中,如图6所示,手持式航向系统检测装置还包括壳体6,壳体6包括手持端61和显示端62。串口显示屏51设置于显示端62。壳体6设置手持端61和显示端62,手持端61便于持握,增加使用的便利性,显示端62显示测试结果,能够直观地查看检查结果,维修人员交互、检测、维修。
53.在一些实施例中,如图3所示,角度数字转换器2包括控制变压器21、误差放大器22、相敏调节器23、压控振荡器24、积分器25及输出锁存器27。控制变压器21与外部航向系统9电信号连接,用于接收航向信号并对接收到的航向信号进行变压。误差放大器22与控制变压器21电信号连接,用于对航向信号进行放大。相敏调节器23与误差放大器22电信号连接,用于对航向信号进行相敏整流。压控振荡器24与相敏调节器23电信号连接,输出频率信号。积分器25的输入端与相敏调节器23电信号连接,积分器25的输出端与压控振荡器24电信号连接。可逆计数器26与压控振荡器24电信号连接,对频率信号进行计数处理。输出锁存器27与可逆计数器26电信号连接,用于将频率信号转换为数字量航向信号,并输出数字量航向信号。通过角度数字转换器2,采集模拟量航向信号,并将模拟量航向信号转换为串行通讯数字信号,便于主控制器3识别测试。
54.在一些实施例中,如图1所示,手持式航向系统检测装置还包括电源电路7,电源电路7与信号接口电路1、角度数字转换器2及主控制器3电信号连接以向信号接口电路1、角度数字转换器2及主控制器3供电。电源电路7用于向手持式航向系统检测装置提供二次电源。
55.在一些实施例中,如图1所示,手持式航向系统检测装置还包括相序识别电路8,相序识别电路8与电源电路7电信号连接,用于对输入电源电路7的三相交流电进行相序检测。
56.从整体上来说,手持式航向系统检测装置以基于arm的32位微主控制器3为控制核心,用高精度12位角度数字转换器2芯片采集航向系统9输出的航向信号,集液晶显示驱动、图片字库存储、图形用户界面操作、时钟芯片显示及各种组态控件于一体的串口显示终端,完成对航向系统9的性能测试。手持式航向系统检测装置为手持式数字显示终端,具有较小的体积、较高的可靠性和电磁兼容性,检测仪设计便于维修人员交互、检测、维修。
57.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1