一种带有多相机的三维激光扫描装置的制作方法
1.本实用新型涉及激光三维成像领域,特别是涉及一种带有多相机的三维激光扫描装置。
背景技术:
2.三维激光扫描技术从上世纪90年代的原理样机逐步商品化而投入实际应用,已经成为三维空间信息获取所不可缺少的技术手段。随着市场应用需求的提高,特别是地面三维激光扫描技术得到了迅速的发展,一方面要求设备整体性能提高,包括点云密度、测量精度等;另一方面要求设备的多功能集成化高、小型化、操作性简便,适应少量操作人员的野外操作。
3.在现有技术中,操作人员在野外操作时,需要配合三维激光扫描装置以及全站仪等,以实现对不同次扫描场景的采集以及后续拼接。由于携带的装置较多,且需分别操作,对于人员数量,工作时长的要求均较高,特别是对于远离城区的户外环境中,人力以及经济成本较高。
4.功能集成度高的产品能够更好的符合实际应用场景的需要,提高作业操作的效率,降低成本。
技术实现要素:
5.本实用新型解决的技术问题在于,提供一种带有多相机的三维激光扫描装置,可以在三维激光扫描装置中集成多种功能。
6.本实用新型公开了一种带有多相机的三维激光扫描装置,该装置包括:激光扫描测量模块、第一相机、第二相机和控制计算模块;
7.该激光扫描测量模块、该第一相机以及该第二相机均绕同一旋转轴旋转;
8.该第一相机与该激光扫描测量模块随时保持同步旋转,该第一相机用于进行与该激光扫描测量模块至少部分视场重叠的扫描拍摄;
9.该第二相机用于进行后视定向;
10.该控制计算模块用于控制该激光扫描测量模块进行扫描、控制该第一相机进行扫描拍摄以及控制该第二相机进行后视定向。
11.该第一相机为线阵相机,该第二相机为面阵相机。
12.该装置还包括远程无线通信模块,该远程无线通信模块与该控制计算模块连接。
13.该装置还包括显示屏,该显示屏与该控制计算模块连接,该显示屏用于显示该第二相机采集的图像。
14.一移动控制端通过该无线通信模块与该第二相机进行远程连接,控制该第二相机,并接收该第二相机采集的数据。
15.该激光扫描测量模块、该第一相机以及该第二相机均随时保持同步旋转。
16.该激光扫描测量模块包括激光器以及多棱塔镜。
17.该多棱塔镜包括:
18.多棱底座,具有多个安置面;
19.多个反射镜,每个反射镜设置于对应的安置面,每个反射镜与对应的安置面一体成型。
20.该装置还包括定位整平模块,用于实现该三维激光扫描装置在预定坡度范围内的自动整平。
21.该激光扫描测量模块、该第一相机、该第二相机三者视场始终保持至少部分重叠。
22.本实用新型使得利用该带有多相机的三维激光扫描装置即可同时实现对三维激光点云数据的采集、图像采集以及后视定向,提升设备功能集成度,提升用户体验。同时可远程控制该多相机的三维激光扫描装置的各个功能模块的运行以及实时查看输出的图像数据,提高用户的操作效率。
附图说明
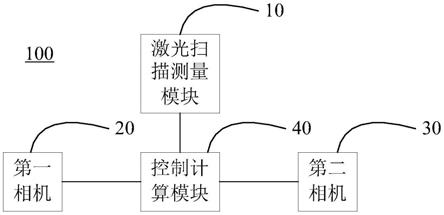
23.图1所示为本实用新型的一种带有多相机的三维激光扫描装置的结构框架示意图。
24.图2所示为本实用新型的一种带有多相机的三维激光扫描装置的结构框架示意图。
25.图3所示为本实用新型的一种带有多相机的三维激光扫描装置的结构示意图。
26.图4所示为本实用新型的激光扫描测量模块的结构图。
具体实施方式
27.以下结合具体实施例描述本实用新型的技术方案的实现过程,不作为对本实用新型的限制。
28.本实用新型公开了一种带有多相机的三维激光扫描装置,如图1、2所示为其结构框架示意图。
29.如图1所示,该带有多相机的三维激光扫描装置100包括:激光扫描测量模块10、第一相机20、第二相机30和控制计算模块40。
30.该控制计算模块40分别与该激光扫描测量模块10、第一相机20、第二相机30连接。
31.该激光扫描测量模块10用于进行三维激光点云数据的采集,该第一相机 20用于进行扫描拍摄,且该第一相机20拍摄图片的视场与该激光扫描测量模块10的视场至少部分重叠。使得该激光扫描测量模块10与该第一相机20可同时针对同一视场进行三维激光点云以及二维图像的拍摄,便于后续的三维激光点云数据与二维图像数据的融合处理。
32.为了保持视场的一致,该第一相机20与该激光扫描测量模块10随时保持同步旋转。
33.为了丰富该带有多相机的三维激光扫描装置100的功能,提升该装置还包括第二相机30。该第二相机30用于实现后视定向。
34.该激光扫描测量模块10、该第一相机20以及该第二相机30均可绕同一旋转轴o旋转。
35.该控制计算模块40用于控制该激光扫描测量模块10进行扫描、控制该第一相机20
进行扫描拍摄以及控制该第二相机30进行后视定向。
36.该激光扫描测量模块10、第一相机20、第二相机30和控制计算模块40 均设置于该转台50上。
37.该转台50可搭载该激光扫描测量模块10、该第一相机20以及该第二相机30并进行转动。该激光扫描测量模块10、该第一相机20以及该第二相机 30通过固定支架60支撑,使得三者的相对位置固定,从而可架构该带有多相机的三维激光扫描装置100的坐标系。该转台50可360度旋转,使得该激光扫描测量模块10、该第一相机20均可实现360度视场。该第二相机30可在 360度范围内进行瞄准,实现该激光扫描测量模块10的后视定向。
38.另外,该第一相机20以及该第二相机30也可以不同步的旋转。该第一相机20以及该第二相机30可分别设置于不同转台上,或受不同驱动装置的驱动。
39.更进一步的,该第一相机20为线阵相机,该第二相机30为面阵相机。
40.该装置100还包括显示屏70,该显示屏70可显示该第二相机30实时采集到的图像,便于用户进行现场观察,实现后视定向。
41.在另一实施例中,该装置100还包括远程无线通信模块80,该远程无线通信模块80与该控制计算模块40连接。
42.一移动控制端200通过该无线通信模块80与该控制计算模块40连接。该移动控制端200可为一手机或平板电脑,用户可通过该移动控制端200发出指令,驱动该激光扫描测量模块10、该第一相机20以及该第二相机30中至少之一开始工作。
43.移动控制端200还通过该无线通信模块80接收该第二相机30采集的图像,并可观察该第二相机30实时采集到的图像,并发出指令,利用该第二相机进行瞄准,从而实现远程对该带有多相机的三维激光扫描装置100的控制以及对后视定向的进程控制。特别是当三维激光扫描装置100由于设置在移动平台或升降平台,而发生位置改变时,利用该移动控制端200可清晰的实时观察第二相机30采集到的数据,提升用户体验。
44.更进一步的,该激光扫描测量模块10、该第一相机20、该第二相机30 三者视场始终保持至少部分重叠。
45.在一优化的实施例中,该第一相机20位于该激光扫描测量模块10上方,该第二相机30位于该激光扫描测量模块10下方。或者,该第一相机20、第二相机均位于该激光扫描测量模块10上方或下方。或者,该第一相机20、该第二相机30位于该激光扫描测量模块10侧边。
46.另外,该装置100还包括定位整平模块,通过该定位整平模块可以实现该装置100在一定坡度范围内自动整平。
47.如图4所示为本实用新型的激光扫描测量模块10的结构图。
48.该激光扫描测量模块10用于采集空间目标的三维激光扫描点云数据。该激光扫描测量模块10包括激光器11以及多棱塔镜12。多棱塔镜12围绕扫描轴x旋转,该激光器11持续发出的激光信号照射到该多棱塔镜12的反射镜上,并投射至周围环境中。
49.该多棱塔镜12包括:
50.多棱底座121,具有多个安置面。
51.多个反射镜122,每个反射镜122设置于对应的安置面,每个反射镜122 与对应的安置面一体成型。使得镜面轻薄,稳定性强,不易掉落。
52.该反射镜的表面涂覆有反射膜层。该反射膜层包括金属膜或介质膜。
53.该多棱塔镜12包括三或四或五或六个安置面,则对应设置有三或四或五或六个镜面。
54.本实用新型使得利用该带有多相机的三维激光扫描装置即可同时实现对三维激光点云数据的采集、图像采集以及后视定向,提升设备功能集成度,提升用户体验。同时可远程控制该多相机的三维激光扫描装置的各个功能模块的运行以及实时查看输出的图像数据,提高用户的操作效率。
55.上述实施例仅为实现本实用新型的示例性描述,而不用以限制本实用新型的保护范围,本领域的技术人员可据以做出各种明显变形以及等同替换的技术方案,皆涵盖于本实用新型的公开范围内,本实用新型的保护范围请参阅后附带权利要求书中记载为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1