一种用于太赫兹系统的二维扫描平移台的制作方法
:
1.本实用新型属于太赫兹光谱和成像技术领域,具体涉及一种用于太赫兹系统的二维扫描平移台。
背景技术:
2.太赫兹波是介于微波和红外波段的一种穿透能力强、光子能量低的电磁波,其频率在0.1~10thz(1thz=10
12
hz)之间。太赫兹光谱和成像系统是利用太赫兹波进行光电导采样,广泛应用于物质识别、安全检查、材料与结构的无损探伤、生物组织的活体检查、无线通信等领域。
3.太赫兹三维层析成像技术,是使用太赫兹层析成像设备,配合二维扫描平台,对被测物体进行太赫兹成像的技术手段。在应用中,二维扫描平台主要负责系统成像过程中,根据用户配置的成像需求,移动载物台上的测试样本,将实时位置数据上传到主机箱设备,配合太赫兹天线进行信号和位置的同步。
4.当下广泛使用的二维扫描平移台,大多很难有太赫兹成像设备在接口及通讯协议上兼容;且多数采用执行部件和驱动部件分离设计,驱动部件采用通用设备,驱动部件与执行部件通过线缆连接。因此造成了设备整体体积较大、重量较重,携带和搬运十分不便,且线缆连接复杂,易造成线缆连接出错等问题。
技术实现要素:
5.针对目前现有的二维平移台的诸多问题,设计的一款小型化的二维扫描平移台。在满足太赫兹三维层析成像设备对控制精度、运行速度、运行范围等条件的基本要求外,进行了小型化设计,在设备的重量、体积和便携度上进行了充分考虑,大大提高了太赫兹成像领域扫描平台的便携性。
6.为了实现上述目的,本实用新型涉及的一种用于太赫兹系统的二维扫描平移台,包括控制单元、驱动单元、执行单元、供电单元和设备外壳,控制单元与太赫兹三维层析成像系统上位机连接进行数据和指令的收发以及步进电机脉冲信号的产生,驱动单元包括x轴步进电机驱动器和y轴步进电机驱动器,执行单元包括十字交叉连接的x轴移动单元和y轴移动单元,载物台固定在执行单元上,x轴步进电机驱动器与x轴移动单元连接,驱动x轴移动单元带动载物台沿x轴运动,y轴步进电机驱动器与y轴移动单元连接,驱动y轴移动单元带动载物台沿y轴运动,供电单元分别与控制单元和驱动单元连接用于提供电能,所述控制单元、驱动单元、执行单元、供电单元集成式固定在设备外壳的空腔中。
7.具体地,控制单元包括相连接的数据处理器与usb接口芯片,usb接口芯片通过usb接口与上位机连接。
8.具体地,所述x轴移动单元和y轴移动单元十字交叉连接,一个在上一个在下,x轴移动单元和y轴移动单元结构相同,均包括两相步进电机、旋转编码器、支撑导轨、丝杆及滑块,步进电机输出轴与丝杆一端转动连接,丝杆安装在支撑导轨开槽内,滑块底部转动连接
在丝杆上,滑块底部左右两侧抵靠在支撑导轨左右两侧的槽边上旋转编码器固定在步进电机端部,用于采集步进电机的实时位置信息,旋转编码器通过编码器接口与太赫兹三维层析成像设备连接。
9.具体地,所述x轴移动单元和y轴移动单元还包括光电限位开关,光电限位开关与控制单元连接,且固定在支撑导轨上的限定位置处。
10.具体地,供电单元为一块ac220v的转换成dc24v和dc5v的双通道隔离电源,分别负责驱动单元和控制单元的供电。
11.具体地,设备外壳采用铝合金材料。
12.具体地,在设备外壳上固定设置电源接口、编码器接口、usb接口和负责二维平台的设备通断电的电源控制开关。
13.本实用新型与现有技术相比,具有以下的优点:
14.1、充分实现太赫兹三维层析成像设备对控制精度、控制距离、位置分辨率的要求。
15.2、一体化设计,将控制、驱动和执行部件集成在壳体内,产品体积小巧、携带方便、接线简单,大大提高了二维平移台类产品的便携性和操作性。
附图说明:
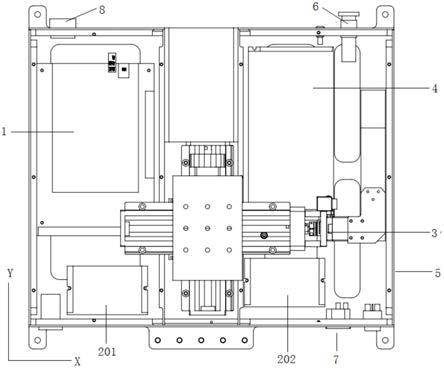
16.图1为本实用新型涉及的用于太赫兹系统的二维扫描平移台结构示意图。
17.图2为本实用新型涉及的用于太赫兹系统的二维扫描平移台原理示意图。
18.图3为本实用新型涉及的执行单元结构示意图。
19.图4为本实用新型涉及的x轴移动单元结构示意图。
具体实施方式:
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.实施例1:
22.如图1和2所示,本实施例涉及的一种用于太赫兹系统的二维扫描平移台,包括控制单元1、驱动单元2、执行单元3、供电单元4和设备外壳5,控制单元1与太赫兹三维层析成像系统上位机连接进行数据和指令的收发以及步进电机脉冲信号的产生,驱动单元2包括x轴步进电机驱动器201和y轴步进电机驱动器202,执行单元3包括十字交叉连接的x轴移动单元和y轴移动单元,载物台固定在执行单元3上,x轴步进电机驱动器201与x轴移动单元连接,驱动x轴移动单元带动载物台沿x轴运动,y轴步进电机驱动器202与y轴移动单元连接,驱动y轴移动单元带动载物台沿y轴运动,进而实现样品在x、y两个方向上的移动,供电单元4分别与控制单元1、驱动单元2连接用于提供电能,所述控制单元1、驱动单元2、执行单元3、供电单元4集成式固定在设备外壳5的空腔中,形成一体化结构。
23.具体地,根据功能和结构要求,控制单元1为独立设计的控制电路板,采用可编程逻辑器件fpga-ep4ce115f29c8n作为数据处理器,保证控制脉冲输出的准确性与时效性;数据处理器与usb接口芯片连接,usb接口芯片采用赛普拉斯-cy7c68013a-128axc型号usb接
口芯片,usb接口芯片通过usb接口与上位机连接,满足上位机与所述二维扫描平移台间的数据交互。
24.如图3和4所示,具体地,所述x轴移动单元和y轴移动单元结构相同,均包括两相步进电机301、旋转编码器302、支撑导轨303、光电限位开关304、丝杆305及滑块306,步进电机301输出轴与丝杆305一端转动连接,丝杆305安装在支撑导轨303开槽内,滑块306底部转动连接在丝杆305上,滑块306底部左右两侧抵靠在支撑导轨303左右两侧的槽边上,随着丝杆305的转动,滑块306沿丝杆305(或沿支撑导轨303)长度方向上往复运动。x轴移动单元和y轴移动单元十字交叉连接,一个在上一个在下,实现载物台在x方向和y方向上的移动,如,x轴移动单元的支撑导轨303底部固定在y轴移动单元的滑块306上,载物台固定在x轴移动单元的滑块306上,或y轴移动单元的支撑导轨303底部固定在x轴移动单元的滑块306上,载物台固定在y轴移动单元的滑块306上。与控制单元1连接的光电限位开关304固定在支撑导轨303上的限定位置处,当滑块306运动到限定位置时,光电限位开关产生限位信号给控制单元1,控制单元1停止控制脉冲的产生,从而达到避免二维平台造成堵转等问题。旋转编码器通过编码器接口与太赫兹三维层析成像设备连接,旋转编码器302固定在步进电机301端部,用于采集步进电机301的实时位置信息,并将其发送至太赫兹三维层析成像设备,收到信号后,太赫兹三维层析成像设备对该位置太赫兹信号进行采集,并将位置信息和该位置的太赫兹信号同步上传到太赫兹三维层析成像系统上位机。
25.具体地,供电单元4为一块ac220v的转换成dc24v和dc5v的双通道隔离电源,分别负责驱动单元2和控制单元1的供电,供电单元4通过电源接口外接电源。
26.具体地,设备外壳5采用铝合金材料设计,表面黑色氧化处理。强度高、密度低,造型美观。
27.具体地,在设备外壳5上固定设置电源接口6、编码器接口7、usb接口8和负责二维平台的设备通断电的电源控制开关。
28.本实施例涉及的一种用于太赫兹三维层析成像系统的二维扫描平移台,具体工作过程为:
29.1)上位机软件通过用户设置的太赫兹成像范围,根据驱动单元2对步进电机的细分控制和执行单元3的步进位移距离,计算出二维扫描平台内执行单元3中两步进电机的主动脉冲数,通过usb接口传给二维平台的控制单元1;
30.2)控制单元1将收到的数据计算后转换成步进电机实际的控制信号,传递给x轴步进电机驱动器201和y轴步进电机驱动器202,x轴步进电机驱动器201和y轴步进电机驱动器202收到控制单元发出的步进脉冲、方向和使能信号后,产生相应的放大脉冲;
31.3)x轴步进电机驱动器201和y轴步进电机驱动器202通过放大后的信号驱动对应步进电机运动,进而带动对应丝杆305转动,滑块306沿丝杆305(或沿支撑导轨303)长度方向上运动,将样品待测点移动到太赫兹发射单元和太赫兹探测单元的焦点处,此时x轴移动单元和y轴移动单元中的编码器将对应步进电机的位置信息发送到太赫兹三维层析设备,设备驱动飞秒激光器发出飞秒脉冲,采集所述待测点的太赫兹信号,并将该点的太赫兹信号和位置信息同步后发送到太赫兹三维层析系统上位机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1