激光雷达的制作方法
1.本技术涉及激光探测技术领域,尤其涉及一种激光雷达。
背景技术:
2.激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,可获得目标的有关信息;如,可获得目标的距离、方位、高度、速度、姿态、甚至形状等信息。然而,相关技术中,由于激光雷达的结构设计不合理,存在探测视场有限的问题。
技术实现要素:
3.本技术提供了一种激光雷达,用于解决相关技术中激光雷达的探测视场有限的问题。
4.本技术提供了一种激光雷达,包括:
5.两个激光发射模组;
6.一个激光接收模组,两个所述激光发射模组分别位于所述激光接收模组的相对的两侧,且两个所述激光发射模组的发射视场的组合与所述激光接收模组的接收视场相匹配。
7.本技术的激光雷达,通过设置两个激光发射模组和一个激光接收模组,且两个激光发射模组的发射视场的组合与激光接收模组的接收视场相匹配,相较于相关技术中采用一个激光发射模组的发射视场与一个激光接收模组的接收视场相匹配而言,两个激光发射模组的布置更加灵活,可以实现激光雷达的小型化设计;且设置两个激光发射模组还可提升激光接收模组的视场接收率、拓展激光雷达的探测视场角。
附图说明
8.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
9.图1是本技术实施例提供的第一种激光雷达中激光发射模组和激光接模组的立体图;
10.图2是本技术实施例提供的第二种激光雷达中激光发射模组和激光接模组的立体图;
11.图3是图1示出的激光雷达中激光发射模组和激光接模组的剖面图;
12.图4是图2示出的激光雷达中激光发射模组和激光接模组的剖面图;
13.图5是图4示出的激光雷达中激光发射模组和激光接模组的一种可替换方案的剖
面图;
14.图6是本技术实施例提供的第三种激光雷达的立体图;
15.图7是图6示出的激光雷达沿a-a方向的剖面图;
16.图8是图6示出的激光雷达的爆炸图;
17.图9是本技术实施例提供的第四种激光雷达的立体图;
18.图10是图9示出的激光雷达沿a-a方向的剖面图;
19.图11是本技术实施例提供的第五种激光雷达的立体图;
20.图12是图11示出的激光雷达沿a-a方向的剖面图;
21.图13是图11示出的激光雷达沿b-b方向的剖面图;
22.图14是本技术实施例提供的第六种激光雷达的立体图;
23.图15是图14示出的激光雷达沿a-a方向的剖面图;
24.图16是图14示出的激光雷达沿b-b方向的剖面图;
25.图17是申请实施例提供的第七种激光雷达中激光发射模组和激光接模组的立体图;
26.图18是图17示出的激光雷达中激光发射模组和激光接模组的爆炸图;
27.图19是本技术实施例提供的第八种激光雷达的立体图;
28.图20是图19示出的激光雷达沿a-a方向的剖面图;
29.图21是图20出的激光雷达沿a-a方向的一种可替换方案的剖面图;
30.图22是图20出的激光雷达沿a-a方向的另一种可替换方案的剖面图。
具体实施方式
31.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施例方式作进一步地详细描述。
32.下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
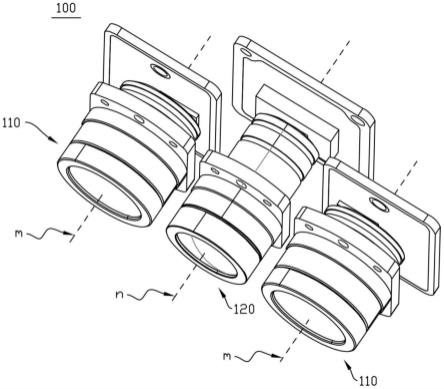
33.请参阅图1和图2,本技术实施例提供了一种激光雷达100。激光雷达100可以为固态激光雷达100,用于汽车、机器人、物流车、巡检车等产品的导航避障、障碍物识别、测距、测速、自动驾驶等功能。
34.具体地,激光雷达100可以包括两个激光发射模组110和一个激光接收模组120。两个激光发射模组110的发射视场的组合可以与激光接收模组120的接收视场相匹配。此方案相较于相关技术中采用一个激光发射模组110的发射视场与一个激光接收模组120的接收视场相匹配而言,可以使两个激光发射模组110的布置更加灵活,进而可实现激光雷达100的小型化设计;且设置两个激光发射模组110还可提升激光接收模组120的视场接收率、拓展激光雷达100的探测视场角。
35.需要说明的是,两个激光发射模组110可以相同也可以不同。在两个激光发射模组110相同时,相较于不同的两个激光发射模组110而言,由于两个激光发射模组110的参数相同,组装定位等操作更加方便。在两个激光发射模组110不同时,可使得两个激光发射模组
110的组合形式更加多样化,能够满足更多的使用场景。
36.在一种示例性的方案中,两个激光发射模组110可以位于激光接收模组120的相对的两侧。如此,两个激光发射模组110的发射视场将大致分布于激光接收模组120的两侧,便于激光接收模组120接收。且两个激光发射模组110的发射视场大致分布于激光接收模组120的两侧,也便于调节至少一个激光发射模组110以使两个激光发射模组110的发射视场在中间具有重叠区域,以使发射视场布满激光接收模组120的整个接收视场,避免出现探测盲点。
37.请参阅图3至图5,每个激光发射模组110均可以包括激光发射镜头111和激光发射传感器112。激光发射传感器112可用于发射光线,激光发射镜头111可以位于激光发射传感器112的出光侧,以能够对激光发射传感器112发射的光线进行汇聚等光学处理,以增强发射视场内的光线强度,提升激光雷达100的探测准确度。
38.激光发射镜头111可以具有第一光轴m,在一些示例性的方案中,请参阅图3和图4,两个激光发射模组110的激光发射传感器112可以位于各自的第一光轴m靠近激光接收模组120的一侧。如此,激光发射传感器112发射的大部分光线经由激光发射镜头111射出后将与该激光发射模组110位于激光接收模组120的同侧。如,在两个激光发射模组110分别位于激光接收模组120的左侧和右侧时,左侧的激光发射模组110的激光发射传感器112可以靠近左侧激光发射模组110的第一光轴m的右侧布置,如此,左侧的激光发射模组110的发射视场将主要分布于激光接收模组120的左侧;同理地,右侧的激光发射模组110的激光发射传感器112可以靠近右侧激光发射模组110的第一光轴m的左侧布置,如此,右侧的激光发射模组110的发射视场将主要分布于激光接收模组120的右侧;这样左侧激光发射模组110的发射视场和右侧激光发射模组110的发射视场组合后可以大致与激光接收模组120的接收视场相匹配,而不至于出现左侧激光发射模组110的发射视场与右侧激光发射模组110的发射视场出现大面积重合区域,造成能量浪费现象。
39.需要说明的是,即使两个激光发射模组110的激光发射传感器112位于各自的第一光轴m靠近激光接收模组120的一侧,也需要保证两个激光发射模组110的发射视场具有重叠区域,避免中间区域出现视场盲区。
40.在激光雷达100的组装过程中,可首先将两个激光发射传感器112预定位至使得各自的发射视场分别位于对应的第一光轴m远离激光接收模组120的一侧,之后再通过微调至少一个激光发射传感器112的方式使得两个发射视场的中间具有重叠区域。
41.在另一种示例性的方案中,请参阅图5,两个激光发射模组110的激光发射传感器112的中心也可以位于各自的第一光轴m处。如此,两个激光发射模组110的发射视场将在各自的第一光轴m的两侧基本呈对称分布。便于两个激光发射模组110与激光接收模组120的组装定位。
42.两个激光发射模组110的第一光轴m和激光接收模组120的第二光轴n可以位于同一平面内。如此,便于两个激光发射模组110和激光接收模组120在组装时的相对距离的运算,降低组装难度;且利于使发射视场内更多的光线均能够被激光接收模组120接收,提升发射视场内的光线利用率。
43.更进一步地,在一些示例性的方案中,请结合图3,两个激光发射模组110的第一光轴m均可以与激光接收模组120的第二光轴n平行。如此,可使得激光雷达100的结构规整、更
加美观,且组装难度较低。进一步地,两个激光发射模组110的第一光轴m可以关于激光接收模组120的第二光轴n对称布置。如此,对于选用两个相同的激光发射模组110而言,可使得两个激光发射模组110的发射视场在激光接收模组120的两侧对称分布,可进一步的降低组装时相对距离的运算难度,便于组装。
44.在另一些示例性的方案中,请参阅图4和图5,两个激光发射模组110的第一光轴m可以均与激光接收模组120的第二光轴n存在夹角。如此,可使得激光发射模组110与激光接收模组120之间的组合形式更加多样,组装方便。优选地,任一个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n的夹角可以为大于0
°
且小于90
°
。
45.需要说明的是,两个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n之间的夹角可以相等也可以不等。如,其中一个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n的夹角为θ1,另一个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n的夹角为θ2,θ1与θ2可以相等也可以不等。优选地,θ1与θ2相等。即,两个激光发射模组110的第一光轴m关于激光接收模组120的第二光轴n对称布置。如此,对于选用两个相同的激光发射模组110而言,可使得两个激光发射模组110的发射视场在激光接收模组120的两侧对称分布,可进一步的降低组装时相对距离的运算难度,便于组装。
46.在又一些示例性的方案中,两个激光发射模组110内,两个第一光轴m中的一个第一光轴m可以与激光接收模组120的第二光轴n存在夹角,另一个第一光轴m可以与第二光轴n平行。本技术实施例的激光发射模组110和激光接收模组120的布置方式具有多样化,可根据实际使用需求进行灵活选取,使用前景较广。
47.本技术实施例中,激光发射模组110的发射视场可大致呈四棱锥型,激光接收模组120的接收视场可大致呈四棱锥型。四棱锥型的视场可大致分为横向视场和纵向视场,上述两个激光发射模组110的发射视场的组合与激光接收模组120的接收视场相匹配可以为:两个激光发射模组110的横向发射视场的组合与激光接收模组120的横向接收视场相匹配,且两个激光发射模组110的纵向发射视场的组合与激光接收模组120的纵向接收视场相匹配。
48.具体地,请参阅图3至图5,当其中一个激光发射模组110的横向发射视场角为α1,纵向发射视场角为β1;另一个激光发射模组110的横向发射视场角为α2,纵向发射视场角为β2;激光接收模组120的横向接收视场角为α3,纵向接收视场角为β3;两个激光发射模组110的第一光轴m和激光接收模组120的第二光轴n位于同一横向平面内时,两个激光发射模组110的横向发射视场的组合与激光接收模组120的横向接收视场相匹配可以为:α3=α1+α2;两个激光发射模组110的纵向发射视场的组合与激光接收模组120的纵向接收视场相匹配可以为:β3=β2=β1。如,图3中,α1可以与α2相等且均为59
°
,此时α3可以为118
°
;β1、β2以及β3均可以为30
°
。如,图5中,α1可以与α2相等且均为11
°
,此时α3可以为22
°
;β1、β2以及β3均可以为7
°
。
49.需要说明的是,针对图5示出的两个激光发射模组110的第一光轴m均与激光接收模组120的第二光轴n之间存在夹角,且两个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n位于同一平面内时,其中一个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n的夹角为θ1,其中一个激光发射模组110在第一平面内的发射视场角可以为2θ1。另一个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n的夹角为θ2,另一个激光发射模组110在第一平面内的发射视场角可以为2θ2。此时,激光接收模组120
在第一平面内的接收视场角为2θ1+2θ2。如此,相较于相关技术中的一个激光发射模组对应一个激光接收模组的方案而言,使得一个激光接收模组120的接收视场角为两个激光发射模组110的发射视场角之和,能够大大提升激光接收模组120的激光接收传感器122的视场接收率,加大激光雷达100的探测视场角。
50.优选地,θ1可以与θ2相等,此时,激光接收模组120的接收视场角将为4*θ1。即在两个激光发射模组110的第一光轴m与激光接收模组120的第二光轴n存在θ1的夹角时,激光接收模组120的横向接收视场角α3将为任意一个激光发射模组110的横向发射视场角的两倍,进而能够提升激光接收模组120的视场接收率,扩展激光雷达100的探测视场角。
51.优选地,θ1=θ2=5.5
°
,两个激光发射模组110的发射视场角均可以为11
°
,激光接收模组120的接收视场角可以为22
°
。在此情况下,可以使得激光雷达100兼顾广视场角和高探测精度的效果。
52.在一种示例性的方案中,两个激光发射模组110的激光发射传感器112可同时发射光线。如此,可缩减激光雷达100的探测时间,提升探测速度。在另一种示例性的方案中,两个激光发射模组110的激光发射传感器112可以不同时发射光线。如此,使得两个激光发射模组110发出的光线不易产生干扰,能够提升激光雷达100探测准确度。
53.两个激光发射模组110的激光发射传感器112均可以包括矩阵排列的多个光源。如,其中一个激光发射传感器112可以包括r*t个光源,另一个激光发射传感器112可以包括p*q个光源。使用时,在其中一个激光发射传感器112中,位于同列的光源可以同时点亮以发射光线,且t个同列光源可以按照预设时序依次点亮。如,第1秒可以点亮第一列光源、第2秒可以点亮第二列光源、第3秒可以点亮第三列光源
……
第t秒可以点亮第t列光源。同理地,在另一个激光发射传感器112中,位于同列的光源也可以同时点亮,且q个同列光源可以按照预设时序依次点亮。如,第1秒可以点亮第一列光源、第2秒可以点亮第二列光源、第3秒可以点亮第三列光源
……
第q秒可以点亮第q列光源。
54.两个激光发射传感器112同时发射光线可以为:第1秒,其中一个激光发射传感器112的第一列光源点亮且另一个激光发射传感器112的第一列光源点亮;第2秒,其中一个激光发射传感器112的第二列光源点亮且另一个激光发射传感器112的第二列光源点亮
……
等,依次类推,直至两个激光发射传感器112的所有光源均被点亮。
55.两个激光发射传感器112不同时发射光线可以为:两个激光发射传感器112按照预设时序依次发射光线。其中,两个激光发射传感器112按照预设时序依次发射光线可以为:两个激光发射传感器112的多个光源按照预设时序依次交替的发射光线。预设时序可以根据实际情况进行灵活调整。如,第1秒点亮其中一个激光发射传感器112的第一列光源、第2秒点亮另一个激光发射传感器112的第一列光源、第3秒点亮其中一个激光发射传感器的第二列光源、第4秒点亮另一个激光发射传感器112的第二列光源
……
等,依次类推,直至两个激光发射传感器112的所有光源均被点亮。
56.在一种示例性的方案中,其中一个激光发射传感器112的第一列光源至第t列光源的排列方向可以与另一个激光发射传感器112的第一列光源至第q列光源的排列方向相同,也可以不同。如,对于两个激光发射模组110分别位于激光发射传感器112的左右两侧,且位于左侧的激光发射模组110的激光发射传感器112上的第一列光源至第t列光源的排列方向为从左至右时,位于右侧的激光发射模组110的激光发射传感器112上的第一列光源至第q
列光源的排列方向可以为从左至右,也可以为从右至左。在使用过程中,可结合实际使用需求进行灵活调整,本技术实施例对此并不作出限定。
57.请参阅图6,激光雷达100还可以包括壳体130。请参阅图7,壳体130可设置有容纳腔131,两个激光发射模组110的至少部分和激光接收模组120的至少部分均可位于容纳腔131内。使得壳体130能够对激光发射模组110和激光接收模组120起到一定的防护作用,进而能够提升激光雷达100的使用寿命。
58.为便于两个激光发射模组110和激光接收模组120在壳体130内的安装定位,请参阅图7和图8,激光雷达100还可以包括位于容纳腔131内的支架140。具体地,支架140可安装于壳体130的内壁上,支架140上可设置有第一安装孔141和分别位于第一安装孔141两侧的第二安装孔142,激光接收模组120可安装于第一安装孔141,每个激光发射模组110可分别安装于一个第二安装孔142。
59.在一种示例性的方案中,激光发射模组110的激光发射镜头111可安装于支架140上,激光接收模组120的激光接收镜头121可安装于支架140上。如此,可将激光发射镜头111和激光接收镜头121安装于支架140上后,再与支架140一体安装于壳体130内,相较于将激光发射镜头111和激光接收镜头121直接与壳体130内壁进行组装而言,组装更为方便。为便于激光发射镜头111和激光接收镜头121与支架140的组装,激光发射镜头111和/或激光接收镜头121上可以安装有固定板,以使激光发射镜头111和激光接收镜头121可经由固定板与支架140连接。
60.支架140可以为一体式结构,也可以包括对应两个激光发射模组110和激光接收模组120分开设置的三个子支架。在支架140为一体式结构时,便于支架140在壳体130内的组装。在支架140包括三个子支架时,使得两个激光发射模组110与子支架的组装、激光接收模组120与子支架的组装相互独立,组装方便。
61.在两个激光发射模组110和激光接收模组120均整体位于容纳腔131内时,壳体130可以包括第一板体132,第一板体132可以具有面向容纳腔131的第一板面1321和与第一板面1321相对的第二板面1322,第一板体132上可以设置有贯穿第一板体132与第二板面1322的第一通光孔1323、及分别位于第一通光孔1323两侧的第二通光孔1324。其中,激光接收模组120可对应第一通光孔1323设置,以使接收光线能够穿过第一通光孔1323到达激光接收模组120。每个激光发射模组110可分别对应一个第二通光孔1324设置,以使发射光线能够穿过第二通光孔1324到达被摄物体。
62.为避免灰尘等杂质经由第一通光孔1323和第二通光孔1324进入到容纳腔131内,影响激光雷达100的探测精度。请结合图6,第一通光孔1323和两个第二通光孔1324处可以设置有透光保护板150。在一种示例性的方案中,第一通光孔1323和两个第二通光孔1324处的透光保护板150可以分开设置。即,每个通光孔处均对应设置一个透光保护板150;如此,可减小透光保护板150的用量,降低生产成本;且可降低激光发射模组110与激光接收模组120之间的光学串扰。在另一种示例性的方案中,请参阅图9和图10,第一通光孔1323和两个第二通光孔1324处的透光保护板150可以为一块板。即,一个透光保护板150对应三个通光孔设置;如此,保证了结构的整体性和简洁性,能够节省组装步骤,提升组装效率。
63.为保证激光雷达100的表面平整度,第二板面1322上可以设置有用于安装透光保护板150的安装槽1325。如此,可避免透光保护板150外凸于壳体130,能够提升激光雷达100
的美观性。
64.具体地,在第一通光孔1323和两个第二通光孔1324对应一个透光保护板150设置时,第二板面1322上可以设置有一个安装槽1325,且该安装槽1325可以与第一通光孔1323和两个第二通光孔1324均连通。
65.请再次参阅图7和图8,在第一通光孔1323和两个第二通光孔1324分别对应一个透光保护板150设置时,透光保护板150可以理解为包括第一子透光保护板151和两个第二子透光保护板152,第二板面1322上可以设置有第一安装槽1326、及分别位于第一安装槽1326两侧的第二安装槽1327,第一安装槽1326可以与第一通光孔1323连通,每个第二安装槽1327可以分别与一个第二通光孔1324连通;此时,第一子透光保护板151可以位于第一安装槽1326,每个第二子透光保护板152可以分别位于一个第二安装槽1327。
66.在一些示例性的方案中,透光保护板150还可以具有光线过滤作用。即,透光保护板150可以选用滤光片,以实现对非工作波段光线的滤除。
67.需要说明的是,两个激光发射模组110和激光接收模组120除可以整体设置于容纳腔131内,两个激光发射模组110和激光接收模组120也可以部分设置于容纳腔131内,部分设置于壳体130外。具体地,请参阅图11和图12,壳体130可以包括第一板体132,第一板体132上可以设置有第三安装孔1328、及分别位于第三安装孔1328两侧的第四安装孔1329,激光接收模组120的接收端124可以穿过第三安装孔1328且位于壳体130外;每个激光发射模组110的发射端114可以分别穿过一个第四安装孔1329且位于壳体130外。如此,方便激光雷达100集成在其他设备上、降低制造成本、降低光学衰减。
68.在一些示例性的方案中,壳体130可以包括第一壳体133、及与第一壳体133相对设置的第二壳体134,第一壳体133可以与第二壳体134连接并形成容纳腔131。具体地,第一壳体133与第二壳体134之间可以为可拆卸式连接,以便于激光发射模组110、激光接收模组120等器件在容纳腔131内的安装。如,第一壳体133与第二壳体134之间可以通过螺钉等方式实现可拆卸式连接。
69.在一些示例性的方案中,两个激光发射模组110的发射端114、激光接收模组120的接收端124中的至少一个的外围可以套设有遮光件160。如此,能够避免激光发射模组110和激光接收模组120之间的光线串扰,提升激光雷达100的探测精度。
70.可以理解地,遮光件160可以为遮光涂层、遮光片等任意的具有遮光性能的器件,本技术实施例对此并不作出限定。
71.每个激光发射模组110除包括激光发射镜头111、激光发射传感器112外,还可以包括与激光发射传感器112电性连接的发射板113,发射板113可用于承载激光发射传感器112并为激光发射传感器112提供供电信号、控制信号等。
72.激光接收模组120可以包括激光接收镜头121、位于激光接收镜头121成像侧的激光接收传感器122、及与激光接收传感器122电性连接的接收板123。激光接收镜头121可以对接收光线进行汇聚,并将汇聚后的光线传送至激光接收传感器122,以能够使更多的光线能够到达激光接收传感器122,提升激光雷达100的探测准确度。接收板123可用于承载激光接收传感器122并为激光接收传感器122提供供电信号、控制信号等。
73.在一些示例性的方案中,两个发射板113和接收板123均可以为独立的电路板,以便于激光发射模组110和激光接收模组120的组装。在另一些示例性的方案中,请参阅图14
至图16,两个发射板113和接收板123也可以共用同一电路板,以降低生产成本且缩减激光雷达100的体积。
74.在发射板113和接收板123相互独立时,在组装过程中,可首先将激光接收镜头121和接收板123调节成标准模组,然后与两个激光发射镜头111一起装配至壳体130内,之后通过调节两个发射板113的位置完成光调工艺。而在发射板113和接收板123共用同一电路板时,在组装过程中,可首先将两个激光发射传感器112和激光接收传感器122安装于电路板上,之后通过调节两个激光发射镜头111和激光接收镜头121完成光调工艺。
75.请参阅图12和图13,激光雷达100还可以包括主控板170,两个发射板113和接收板123均可与主控板170电性连接。主控板170可以与接口板180连接,并可通过接口板180与外部接头200的电性连接实现供电和/或通讯。其中,主控板170与接口板180之间可以利用软排线等接插件连接。主控板170和接口板180可以位于激光发射模组110和激光接收模组120的上方。
76.主控板170、发射板113、接收板123中的至少一个与壳体130可以设置有导热件190。使得主控板170、发射板113、接收板123产生的热量可以经由导热件190导到壳体130上散出,实现大功率器件的散热,提升激光雷达100的散热性能。其中,导热件190可以包括导热硅胶片、散热翅片等。
77.请参阅图17和图18,两个激光发射模组110中,至少一个激光发射模组110还可以包括第一调节件115,第一调节件115可以连接激光发射镜头111及发射板113。第一调节件115可以调节激光发射镜头111与发射板113上激光发射传感器112的相对位置,实现发射光轴的配准,进而提升激光雷达100的探测精度。
78.在一种示例性的方案中,第一调节件115可以包括第一调节板1151、第二调节板1152及第一锁紧部1153,第一调节板1151可以连接激光发射镜头111,第一调节板1151上可以设置有第一限位孔g1。第二调节板1152上可以设置有第二限位孔g2,第一限位孔g1和/或第二限位孔g2可沿第一方向延伸,第一锁紧部1153可以穿设于第一限位孔g1及第二限位孔g2内且与第一调节板1151、第二调节板1152可拆卸连接。如此,在组装激光发射模组110时,可首先通过第一调节件115实现激光发射镜头111与发射板113的预定位,之后将第一锁紧部1153在第一限位孔g1和/或第二限位孔g2内沿第一方向微调,即可实现激光发射镜头111与发射板113上激光发射传感器112的微调,进而提升发射光轴的配准度,调节方式简单且易操作。
79.在一种示例性的方案中,第一锁紧部1153可以包括螺钉和螺母,螺钉的杆部可以穿设于第一限位孔g1及第二限位孔g2,螺母可以位于螺钉的杆部背离螺钉的端部的一侧且与杆部螺纹连接。如此,螺钉与螺母拧紧时,螺钉的端部和螺母可以抵紧于第一调节板1151和第二调节板1152的相背的两个板面,从而实现第一调节板1151和第二调节板1152的固定。在需要沿第一方向调节激光发射镜头111与发射板113的相对位置时,可首先松动螺钉与螺母之间的连接,且沿第一方向移动第二调节板1152,在移动到位后可将螺钉与螺母拧紧从而将第一调节板1151与第二调节板1152固定。通过螺钉和螺母配合实现第一调节板1151和第二调节板1152的抵接锁紧和解除锁紧,调节方便且连接可靠。
80.需要说明的是,第一锁紧部1153也可以包括销钉,销钉的外表面可以与第一限位孔g1的内壁面、第二限位孔g2的内壁面过盈配合,从而实现第一调节板1151与第二调节板
1152的固定。当然,第一锁紧部1153还可以包括固定安装于第一限位孔g1或第二限位孔g2内的插销等,本技术实施例对此并不作出限定。
81.进一步地,第一调节件115还可以包括第三调节板1154及第二锁紧部1155,第二调节板1152上还可以设置有第三限位孔g3,第三调节板1154可以设置有第四限位孔g4,第三限位孔g3和/或第四限位孔g4可沿第二方向延伸,第二锁紧部1155可穿设于第三限位孔g3及第四限位孔g4内且与第二调节板1152、第三调节板1154可拆卸连接。其中,第二方向可以与第一方向相交,第三调节板1154连接发射板113,以能够实现激光发射镜头111与发射板113在两个方向上的微调。具体地,在组装激光发射模组110时,可首先通过第一调节件115实现激光发射镜头111与发射板113的预定位,之后将第一锁紧部1153在第一限位孔g1和/或第二限位孔g2内沿第一方向运动可实现激光发射镜头111与发射板113在第一方向上的微调,将第二锁紧部1155在第三限位孔g3和/或第四限位孔g4内沿第二方向运动可实现激光发射镜头111与发射板113在第二方向上的微调,能够从两个方向上对发射光轴进行配准,提升发射光轴的配准度。
82.同理地,第二锁紧部1155可以包括螺钉和螺母,也可以包括销钉,还可以包括固定安装于第三限位孔g3或第四限位孔g4内的插销等,本技术实施例在此不再赘述。
83.进一步地,第一调节件115还可以包括第三锁紧部1156,第三调节板1154与发射板113之间可通过第三锁紧部1156连接。具体地,第三调节板1154上还可以设置有第五限位孔g5,发射板113上可以设置有第六限位孔g6,第五限位孔g5和/或第六限位孔g6可沿第三方向延伸,第三锁紧部1156可穿设于第五限位孔g5及第六限位孔g6内且与第三调节板1154、发射板113可拆卸连接。其中,第一方向、第二方向和第三方向可以两两垂直,以能够实现激光发射镜头111与发射板113在两两相互垂直的三个方向上的微调。具体地,在组装激光发射模组110时,可首先通过第一调节件115实现激光发射镜头111与发射板113的预定位,之后将第一锁紧部1153在第一限位孔g1和/或第二限位孔g2内沿第一方向运动可实现激光发射镜头111与发射板113在第一方向上的微调,将第二锁紧部1155在第三限位孔g3和/或第四限位孔g4内沿第二方向运动可实现激光发射镜头111与发射板113在第二方向上的微调,将第三锁紧部1156在第五限位孔g5和/或第六限位孔g6内沿第三方向运动可实现激光发射镜头111与发射板113在第三方向上的微调,能够从两两相互垂直的三个方向上对发射光轴进行配准,能够实现发射光轴调整至最佳配准状态。
84.同理地,第三锁紧部1156可以包括螺钉和螺母,也可以包括销钉,还可以包括固定安装于第五限位孔g5或第六限位孔g6内的插销等,本技术实施例在此不再赘述。
85.同理地,激光接收模组120还包括第二调节件125,第二调节件125可以连接激光接收镜头121与接收板123。第二调节件125可以调节激光接收镜头121与接收板123上激光接收传感器122的相对位置,实现接收光轴的配准,进而提升激光雷达100的探测精度。
86.在一种示例性的方案中,第二调节件125可以包括第四调节板1251、第五调节板1252及第四锁紧部1253,第四调节板1251可以连接激光接收镜头121,第四调节板1251上可以设置有第一定位孔h1。第五调节板1252上可以设置有第二定位孔h2,第一定位孔h1和/或第二定位孔h2可沿第一方向延伸,第四锁紧部1253可以穿设于第一定位孔h1及第二定位孔h2内且与第四调节板1251、第五调节板1252可拆卸连接。如此,在组装激光接收模组120时,可首先通过第二调节件125实现激光接收镜头121与接收板123的预定位,之后将第四锁紧
部1253在第一定位孔h1和/或第二定位孔h2内沿第一方向微调,即可实现激光接收镜头121与接收板123上激光接收传感器122的微调,进而提升接收光轴的配准度,调节方式简单且易操作。
87.在一种示例性的方案中,第四锁紧部1253可以包括螺钉和螺母,螺钉的杆部可以穿设于第一定位孔h1及第二定位孔h2,螺母可以位于螺钉的杆部背离螺钉的端部的一侧且与杆部螺纹连接。如此,螺钉与螺母拧紧时,螺钉的端部和螺母可以抵紧于第四调节板1251和第五调节板1252的相背的两个板面,从而实现第四调节板1251和第五调节板1252的固定。在需要沿第一方向调节激光接收镜头121与接收板123的相对位置时,可首先松动螺钉与螺母之间的连接,且沿第一方向移动第五调节板1252,在移动到位后可将螺钉与螺母拧紧从而将第四调节板1251与第五调节板1252固定。通过螺钉和螺母配合实现第四调节板1251和第五调节板1252的抵接锁紧和解除锁紧,调节方便且连接可靠。
88.需要说明的是,第四锁紧部1253也可以包括销钉,销钉的外表面可以与第一定位孔h1的内壁面、第二定位孔h2的内壁面过盈配合,从而实现第四调节板1251与第五调节板1252的固定。当然,第四锁紧部1253还可以包括固定安装于第一定位孔h1或第二定位孔h2内的插销等,本技术实施例对此并不作出限定。
89.进一步地,第二调节件125还可以包括第六调节板1254及第五锁紧部1255,第五调节板1252上还可以设置有第三定位孔h3,第六调节板1254可以设置有第四定位孔h4,第三定位孔h3和/或第四定位孔h4可沿第二方向延伸,第五锁紧部1255可穿设于第三定位孔h3及第四定位孔h4内且与第五调节板1252、第六调节板1254可拆卸连接。其中,第二方向可以与第一方向相交,第六调节板1254连接接收板123,以能够实现激光接收镜头121与接收板123在两个方向上的微调。具体地,在组装激光接收模组120时,可首先通过第二调节件125实现激光接收镜头121与接收板123的预定位,之后将第四锁紧部1253在第一定位孔h1和/或第二定位孔h2内沿第一方向运动可实现激光接收镜头121与接收板123在第一方向上的微调,将第五锁紧部1255在第三定位孔h3和/或第四定位孔h4内沿第二方向运动可实现激光接收镜头121与接收板123在第二方向上的微调,能够从两个方向上对接收光轴进行配准,提升接收光轴的配准度。
90.同理地,第五锁紧部1255可以包括螺钉和螺母,也可以包括销钉,还可以包括固定安装于第三定位孔h3或第四定位孔h4内的插销等,本技术实施例在此不再赘述。
91.进一步地,第二调节件125还可以包括第六锁紧部1256,第六调节板1254与接收板123之间可通过第六锁紧部1256连接。具体地,第六调节板1254上还可以设置有第五定位孔h5,接收板123上可以设置有第六定位孔h6,第五定位孔h5和/或第六定位孔h6可沿第三方向延伸,第六锁紧部1256可穿设于第五定位孔h5及第六定位孔h6内且与第六调节板1254、接收板123可拆卸连接。其中,第一方向、第二方向和第三方向可以两两垂直,以能够实现激光接收镜头121与接收板123在两两相互垂直的三个方向上的微调。具体地,在组装激光接收模组120时,可首先通过第二调节件125实现激光接收镜头121与接收板123的预定位,之后将第四锁紧部1253在第一定位孔h1和/或第二定位孔h2内沿第一方向运动可实现激光接收镜头121与接收板123在第一方向上的微调,将第五锁紧部1255在第三定位孔h3和/或第四定位孔h4内沿第二方向运动可实现激光接收镜头121与接收板123在第二方向上的微调,将第六锁紧部1256在第五定位孔h5和/或第六定位孔h6内沿第三方向运动可实现激光接收
镜头121与接收板123在第三方向上的微调,能够从两两相互垂直的三个方向上对接收光轴进行配准,能够实现接收光轴调整至最佳配准状态。
92.同理地,第六锁紧部1256可以包括螺钉和螺母,也可以包括销钉,还可以包括固定安装于第五定位孔h5或第六定位孔h6内的插销等,本技术实施例在此不再赘述。
93.可以理解的是,本技术通过设置第一调节件115和第二调节件125,通过调节件中的调节板、限位孔和锁紧件的配合,可以在保证尽量小的调节量的同时,保证调节效率和精度。
94.请参阅图19和图20,图19和图20是本技术实施例的第九种激光雷达100的立体图及剖面图,图20所示的激光雷达100与图7示出的激光雷达100的不同之处包括:图7示出的两个激光发射模组110和激光接收模组120位于同一个容纳腔131内,而图20示出的两个激光发射模组110和激光接收模组120位于不同的容纳腔。具体地,壳体130可以包括第一板体135、第二板体136、周侧板137以及两个第一隔板138。第二板体136可以与第一板体135间隔设置,周侧板137可以位于第一板体135的外围且连接第一板体135和第二板体136,周侧板137、第一板体135和第二板体136之间形成容纳腔131。周侧板137可以包括多个侧板,若将相对设置的两个侧板分别定义为第一侧板1371和第二侧板1372,两个第一隔板138可以间隔分布于容纳腔131且均连接于第一侧板1371和第二侧板1372之间。两个第一隔板138之间可以形成第一容纳腔1311,每个第一隔板138与周侧板137之间可以形成第二容纳腔1312,激光接收模组120的至少部分可以位于第一容纳腔1311,每个激光发射模组110的至少部分可以分别位于一个第二容纳腔1312。如此,激光发射模组110与激光接收模组120之间不会产生光串扰,有利于提升激光雷达100的探测精度。
95.进一步地,壳体130还可以包括第二隔板139,第二隔板139可位于容纳腔131内且连接于第一侧板1371和第二侧板1372之间,且两个第一隔板138可位于靠近第一板体135的一侧,第二隔板139可位于靠近第二板体136的一侧。第二隔板139与周侧板137之间可形成第三容纳腔1313,激光雷达100的主控板170、接口板180等可位于第三容纳腔1313内,以使激光发射模组110、激光接收模组120、主控板170、接口板180等结构的安装相互独立,且布线更加方便。其中,第二隔板139上可以设置有穿设线路的安装孔。
96.与图7示出的方案相同,参见图20,激光接收模组120和两个激光接收模组120均可以整体位于容纳腔131。此时,第一板体135可以具有面向容纳腔131的第一板面1351和与第一板面1351相对的第二板面1352,第一板体135上可以设置有贯穿第一板面1351与第二板面1352的第一通光孔1353、及分别位于第一通光孔1353两侧的第二通光孔1354。激光接收模组120可对应第一通光孔1353设置,以使接收光线能够穿过第一通光孔1353到达激光接收模组120。每个激光发射模组110可分别对应一个第二通光孔1354设置,以使发射光线能够穿过第二通光孔1324到达被摄物体。
97.需要说明的是,图20中,激光接收模组120和两个激光接收模组120均整体位于容纳腔131,具体为,激光接收模组120整体位于第一容纳腔1311,每个激光接收模组120整体分别位于一个第二容纳腔1312。
98.同理地,图20中,第二板面1352处可以设置有覆盖第一通光孔1353及两个第二通光孔1354的透光保护板150。第二板面1352上可以设置有安装槽1355,安装槽1355可以与第一通光孔1353和两个第二通光孔1354均连通,透光保护板150位于安装槽1355内。使得透光
保护板150不外凸于壳体130,提升激光雷达100的美观性。
99.在一种示例性的方案中,第二板面1352上可以设置有第一安装槽、及分别位于第一安装槽两侧的第二安装槽,第一安装槽可以与第一通光孔1353连通,每个第二安装槽可以分别与一个第二通光孔1354连通,透光保护板150包括第一子透光保护板150和两个第二子透光保护板150,第一子透光保护板150可以位于第一安装槽,每个第二子透光保护板150可以分别位于一个第二安装槽。在另一种示例性的方案中,结合图21,安装槽1355可以为一个整体,且与第一通光孔1353及两个第二通光孔1354均连通。
100.结合图22,两个激光发射模组110和激光接收模组120也可以部分设置于容纳腔131内,部分设置于壳体130外。此时,第一板体135上设置有第一安装孔1356、及分别位于第一安装孔1356两侧的第二安装孔1357,激光接收模组120的接收端穿过第一安装孔1356且位于壳体130外,每个激光接收模组120的发射端分别穿过一个第二安装孔1357且位于壳体130外。
101.以上所揭露的仅为本技术较佳实施例而已,当然不能以此来限定本技术之权利范围,因此依本技术权利要求所作的等同变化,仍属本技术所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1