一种应用于管道或隧道的三维测绘装置的制作方法
1.本实用新型涉及三维测绘设备技术领域,更具体的是涉及一种应用于管道或隧道的三维测绘装置技术领域。
背景技术:
2.三维测绘仪器有车辆或机器人平台搭载,对隧道或管道内部的三维几何尺寸进行测量,并记录线管数据,采用单一的检测设备不具有全方位检测数据的能力,后续为了满足全方位测绘时,需要搭载专门转向的设备,还需搭载驱动供转向的设备运转,装载过的设备造成设备的体积过大以及整体设备沉重的缺陷。
技术实现要素:
3.本实用新型的目的在于:为了解决上述技术问题,本实用新型提供一种应用于管道或隧道的三维测绘装置。
4.本实用新型为了实现上述目的具体采用以下技术方案:
5.一种应用于管道或隧道的三维测绘装置,包括用于支撑的机架,在所述机架的端部一点环绕设置有多相机联合使用覆盖全部圆周视角的深度相机,所述深度相机与机架连接。
6.进一步的,所述深度相机与机架为可拆卸连接。
7.进一步的,所述深度相机与机架通过紧固件连接。
8.进一步的,所述机架包括上托板、下托板、支撑在上托板和下托板之间的第一支撑杆,所述第一支撑杆的一端与上托板,第一支撑杆的另一端与下托板连接,上托板和下托板的侧面分别连接有深度相机。
9.进一步的,所述上托板和下托板形状均为棱柱体结构。
10.进一步的,在所述上托板的顶部竖直开有至少两个安装孔。
11.进一步的,在所述下托板底部设置有安装板,所述下托板与安装板之间设置有至少两个第二支撑杆,第二支撑杆的一端与下托板连接,第二支撑杆的另一端与安装板连接。
12.进一步的,在所述安装板底部设置有底盘,在底盘上开有定位孔,底盘与安装板之间竖直设置有第三支撑杆,第三支撑杆的一端与底盘连接,第三支撑杆的另一端与安装板连接。
13.进一步的,在所述安装板与底盘之间设置有工控电脑,所述深度相机的信号输出端与工控电脑的信号输入端连接。
14.进一步的,其三维测绘装置的应用方法包括如下步骤:
15.s1:将三维测绘装置连接在机器人平台上;
16.s2:机器人平台按照预设轨道进行,并在行进中由三维测绘装置对隧道或管道内部的三维几何尺寸进行测量;
17.s3:三维测绘装置所测量的三维几何尺寸的数据信息传输至工控电脑存储;
18.s4:工控电脑接收到该三维几何尺寸的数据信息传输至终端显示。
19.本实用新型的有益效果如下:
20.1.为了实现全方位三维深度数据测绘,因此在机架上设置多个深度相机,每个相机负责圆周方向一定角度的三维深度数据测绘,多相机联合使用覆盖全部圆周视角,即可不需要装载搭载专门转向的设备,更不需要搭载驱动供转向的设备运转,相对于增加不同角度的深度相机,深度相机的体积较小,因此能够弥补设备的体积过大或设备过于沉重的问题。
21.2.选择可拆卸的方式连接深度相机与机架,便于调整实际的安装需求数量作出调整,其次,便于对受损的单个深度相机进行更换。
22.3.设计第一支撑杆用于支撑上托板和下托板的同时,为二者提供一定的高度差,以便于后续安装深度相机于上托板和下托板上。
23.4.在上托板的顶部开有多个安装孔,可后续装载其他所需的设备,同时还可用于放置于深度相机管线。
24.5.为了装载工控电脑设计第三支撑杆做支撑的同时提供一定的安装空间,并且将工控电脑放置在底盘与安装板之间起着保护的作用。
附图说明
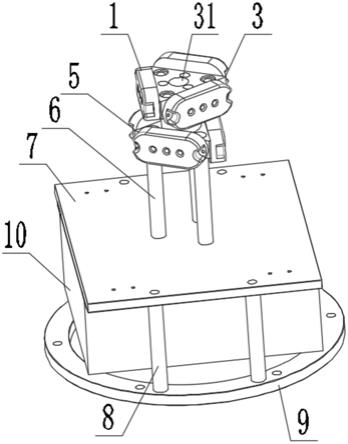
25.图1是本实用新型的结构示意图;
26.图2是本实用新型的机架结构示意图;
27.图3是本实用新型的图1的俯视示意图;
28.图4是本实用新型的图1的仰视示意图;
29.附图标记:1-深度相机;2-机架;3-上托板;31-安装孔;4-第一支撑杆;5-下托板;6-第二支撑杆;7-安装板;8-第三支撑杆;9-底盘;10-工控电脑。
具体实施方式
30.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
31.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.实施例1
33.如图1所示,本实施例提供一种应用于管道或隧道的三维测绘装置,包括用于支撑的机架2,在所述机架2的端部一点环绕设置有多相机联合使用覆盖全部圆周视角的深度相机1,所述深度相机1与机架2连接。
34.为了实现全方位三维深度数据测绘,因此在机架上设置多个深度相机,如图3所示,其虚线为深度相机1的可视范围,每个相机负责圆周方向一定角度用以三维深度数据测
绘,多相机联合使用从而覆盖全部圆周,其次圆周分布的多个深度相机1全方位覆盖,确保在行进的过程中没有死角,深度相机1的配置数量可根据单个相机的视角和被测圆周的角度决定,并提供具体的参数例如:一个相机可以覆盖的径向夹角为120度,三个相机也能实现360度全覆盖;作用于提升其三维深度数据测绘的信息完整性,即可不需要装载搭载专门转向的设备,更不需要搭载驱动供转向的设备运转,相对于增加不同角度的深度相机,深度相机的体积较小,因此能够弥补设备的体积过大或设备过于沉重的问题。
35.实施例2:
36.本实施例在实施例1的基础上开展,如图1所示,在深度相机1与机架2为可拆卸连接;具体方式在深度相机1与机架2通过紧固件连接,紧固件为紧固螺栓,在深度相机1的两侧开孔,且在机架2的上托板3、下托板5上开螺纹孔,螺栓穿过深度相机1的孔后螺纹连接在托板的螺纹孔内固定。
37.实施例3:
38.本实施例基于实施例1的基础上开展,如图2所示,所述机架2包括上托板3、下托板5、支撑在上托板3和下托板5之间的第一支撑杆4,所述第一支撑杆4的一端与上托板3,第一支撑杆4的另一端与下托板5连接,为了便于错位安装深度相机1,第一支撑杆4用于支撑上托板3和下托板5的同时,为二者提供一定的高度差,以便于后续安装多个深度相机1于上托板3和下托板5的侧面,作为优选的上托板3和下托板5可采用形状均为棱柱体结构,三棱体,且如图2所示,本实施例采用三棱体状,以水平角度错位的方式安装深度相机1,安装后的整体详情参考如图1,此形状均为三棱体仅作为本实施例开展,不仅限于该三棱体,其余四棱体,五棱体等均可使用。
39.实施例4:
40.本实施例为了便于后续装载陀螺仪、加速度计、温度计、湿度计、磁力计及其他辅助姿态和环境感知传感设备,如图3所示,所以在所述上托板3的顶部竖直开有至少两个安装孔31,同时安装孔31还可用于放置于深度相机1管线;如图2所示,在所述下托板5底部设置有安装板7,所述下托板5与安装板7之间设置有至少两个第二支撑杆6,第二支撑杆6的一端与下托板5连接,第二支撑杆6的另一端与安装板7连接,此第二支撑杆6用于提升下托板5的高度,为了确保其稳定性,可以选择呈三角形分布;在所述安装板7底部设置有底盘9,如图4所示,在底盘9上开有定位孔,其中定位孔可通过紧固件与车辆或机器人平台搭载进行任一连接,底盘9与安装板7之间竖直设置有第三支撑杆8,第三支撑杆8的一端与底盘9连接,第三支撑杆8的另一端与安装板7连接;在所述安装板7与底盘9之间设置有工控电脑10,所述深度相机1的信号输出端与工控电脑10的信号输入端连接,为了装载工控电脑10因此需要第三支撑杆8做支撑,然后将工控电脑10放置在底盘9与安装板7之间起着保护的作用,其中可设多跟第三支撑杆8沿矩阵分布来满足其稳定性,最好设置四跟来满足其稳定性。
41.实施例5:
42.其三维测绘装置的应用方法包括如下步骤:
43.s1:将三维测绘装置连接在机器人平台上;
44.s2:机器人平台按照预设轨迹进行,并在行进中由三维测绘装置对隧道或管道内部的三维几何尺寸进行测量;
45.s3:三维测绘装置所测量的三维几何尺寸的数据信息传输至工控电脑存储;
46.s4:工控电脑接收到该三维几何尺寸的数据信息传输至终端显示。
47.在底盘9上开有定位孔,通过其孔与机器人平台搭载,三维测绘装置的深度相机实施传输信息时,人工可操作机器人平台前进,还可对前沿管路的环境情况显示在显示器上,供其查阅,而存储在工控电脑内的三维几何尺寸的数据信息,工控电脑对三维几何尺寸的数据信息进行频编解码,再通tcp/ip通讯协议无线传输至终端显示,上述方式可实现其信息的实时性,对设备的周围的环境实时查看,设备在行进的过程中检测由深度相机1对隧道或管道内部的三维几何尺寸进行测量,并记录在工控电脑存储,以供后续翻阅。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1