一种AGV激光雷达安装结构的制作方法
一种agv激光雷达安装结构
技术领域
1.本实用新型涉及机械机构技术领域,尤其是涉及一种agv激光雷达安装结构。
背景技术:
2.激光雷达扫描仪是一种测量精度高、范围大的三维、非接触测量仪,在航天、航空、汽车、造船等领域有广泛应用。在移动机器人(agv)领域,激光雷达是导航的重要部件,激光雷达获取数据的可靠性决定了机器人导航、定位、避障的可靠性。
3.一般情况下,通过将激光雷达通过螺栓等安装在机器人外壳上,在常规的方案中,激光雷达的安装角度仅依靠机械加工的精度来保证,缺乏有效的调整机构。像相机一样,激光雷达的安装角度决定了其扫描视角,由于零件加工或装配的误差,可能导致激光雷达的扫描视角存在角度上的偏差。如果向下偏的较多,则容易扫描到地面,如果向上偏的较多,则容易扫描到天花板,使得激光雷达不能很好地采集有效数据。
技术实现要素:
4.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种agv激光雷达安装结构。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种agv激光雷达安装结构,包括支架本体、第一螺丝和第二螺丝,用于将激光雷达安装在l型结构的agv外壳上;
7.所述支架本体与agv外壳适配,包括底座和立板;立板与agv外壳相连,底座置于agv外壳上方,激光雷达安装在底座上;所述底座上设有第一螺纹孔和腰形通孔,第一螺丝拧紧在第一螺纹孔中并与agv外壳抵接,所述agv外壳上设有第二螺纹孔,第二螺纹孔与腰形通孔的位置适配,第二螺丝穿过腰形通孔后拧紧于第二螺纹孔。
8.优选的,所述立板与agv外壳螺接。
9.优选的,立板上设有第一通孔,agv外壳上设有连接螺纹孔,立板通过连接螺丝与agv外壳螺接。
10.优选的,所述激光雷达螺接在底座上。
11.优选的,底座上设有第二通孔,激光雷达的底面设有固定螺纹孔,激光雷达通过固定螺丝螺接在底座上。
12.优选的,激光雷达安装在底座的中间,所述第一螺纹孔的数量为2个,设置在底座的两侧,所述腰形通孔的数量为2个,设置在底座的两侧。
13.优选的,底座的中间区域镂空,镂空区域与激光雷达的底面适配,agv外壳上留有线束口,立板上留有与线束口适配的缺口。
14.优选的,缺口与镂空区域连通。
15.优选的,所述底座和立板一体成型。
16.优选的,所述第一螺纹孔为焊接在底座上的螺母。
17.与现有技术相比,本实用新型具有以下有益效果:
18.在支架本体上设置了第一螺纹孔和腰形通孔,在agv外壳上设置了第二螺纹孔,第一螺丝拧紧在第一螺纹孔内并抵住agv外壳,第二螺丝穿过腰形通孔并拧紧在第二螺纹孔内,通过拧动第一螺丝和第二螺丝实现支架本体弯曲角度的调节,从而实现安装在支架本体上的激光雷达的扫描视角的上下调整。
附图说明
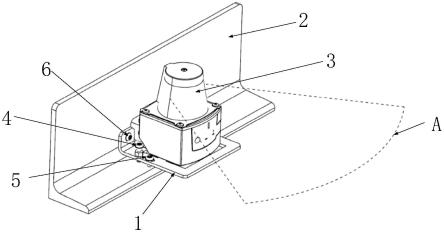
19.图1为本实用新型的结构示意图;
20.图2为本实用新型的结构示意图;
21.图3为支架本体的结构示意图;
22.图4为agv外壳的结构示意图;
23.附图标记:1、支架本体,2、agv外壳,3、激光雷达,4、第一螺丝,5、第二螺丝,6、连接螺丝,7、固定螺丝;a、激光雷达的扫描视角,b、支架本体的弯曲角度;
24.1-1、第一螺纹孔,1-2、腰形通孔,1-3、第一通孔,1-4、第二通孔,2-1、第二螺纹孔,2-2、连接螺纹孔,2-3、线束口。
具体实施方式
25.下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
26.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本实用新型并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件。
27.实施例1:
28.一种agv激光雷达安装结构,如图1至图4所示,包括支架本体1、第一螺丝4和第二螺丝5,用于将激光雷达3安装在l型结构的agv外壳2上;
29.支架本体1与agv外壳2适配,形状为l形,包括底座和立板,底座和立板一体成型;立板与agv外壳2相连,底座置于agv外壳2上方,激光雷达3安装在底座上;底座上设有第一螺纹孔1-1和腰形通孔1-2,第一螺丝4拧紧在第一螺纹孔1-1中并与agv外壳2抵接,agv外壳2上设有第二螺纹孔2-1,第二螺纹孔2-1与腰形通孔1-2的位置适配,第二螺丝5穿过腰形通孔1-2后拧紧于第二螺纹孔2-1。考虑到支架本体1的厚度,第一螺纹孔1-1可以为焊接在底座上的螺母。
30.立板与agv外壳2螺接。本实施例中,立板上设有第一通孔1-3,agv外壳2上设有连接螺纹孔2-2,立板通过连接螺丝6与agv外壳2螺接,连接螺丝6穿过第一通孔1-3后拧紧在连接螺纹孔2-2中。螺接的方式便于拆卸更换,本实施例中通孔与螺纹孔的设置可以隐藏连接螺丝6,整齐度高,更加美观,其他实施方式中,也可以使用螺栓等紧固件实现支架本体1的agv外壳2的连接。
31.激光雷达3螺接在底座上。本实施例中,底座上设有第二通孔1-4,激光雷达3的底面设有固定螺纹孔,激光雷达3通过固定螺丝7螺接在底座上,固定螺栓穿过第二通孔1-4后
拧紧在固定螺纹孔中。螺接的方式便于拆卸更换,本实施例中通孔与螺纹孔的设置可以隐藏固定螺丝7,整齐度高,更加美观,其他实施方式中,也可以使用螺栓等紧固件实现支架本体1的agv外壳2的连接。为了便于装配,第二通孔1-4可以设置成沉头孔。
32.激光雷达3安装在底座的中间,第一螺纹孔1-1的数量为2个,设置在底座的两侧,腰形通孔1-2的数量为2个,设置在底座的两侧。两侧的第一螺纹孔1-1及腰形通孔1-2对称设置。这样两侧对称的设置能更好地调节底座与agv外壳2之间的倾斜度,从而使得安装在底座上的激光雷达3的扫描仰角发生改变。
33.调节方式如下:
34.第一螺丝4穿过第一螺纹孔1-1抵靠在agv外壳2上,第二螺丝5穿过腰形通孔1-2拧紧在agv外壳2上的第二螺纹孔2-1内。拧动第一螺丝4,在螺丝力的作用下,底座背向agv外壳2推远,从而使得支架本体1的弯曲角度b减小,实现激光雷达3扫描视角a的向上调整;拧动第二螺丝5,在螺丝力的作用下,底座向agv外壳2拉近,从而使得支架本体1的弯曲角度b增加,实现激光雷达3扫描视角a的向下调整。
35.如图3所示,底座的中间区域镂空,镂空区域与激光雷达3的底面适配,agv外壳2上留有线束口2-3,立板上留有与线束口2-3适配的缺口,从而可以将激光雷达3的线路连接至agv机器人内部。镂空区域的设置可以减轻重量,而且调节激光雷达3扫描视角a时更加省力,缺口与镂空区域连通。
36.本技术的结构简单,成本较低,可以高精度、灵活调整底座与agv外壳2之间的角度,将底座拉近或推离agv外壳2,从而改变支架本体1的弯曲角度b,实现激光雷达3扫描视角a的上下微调,调节效果好。常规的方案中仅依靠机械加工的精度来保证激光雷达3的安装角度,无疑对加工精度要求较高,在批量化产品生产时由于零件加工的误差或是装配的误差,难以保证各个产品的安装角度合格,激光雷达3的扫描视角a可能存在角度上的偏差。本技术的投用,可以实现激光雷达3安装角度的微调,从而保证agv工作时激光雷达3的扫描视角a,以保证其扫描的数据的可靠性。
37.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1