一种高速雷达装置的制作方法
1.本实用新型涉及电力电子技术领域,特别涉及一种高速雷达装置。
背景技术:
2.目前激光雷达技术应用面越来越广,各种智能机器人,无人驾驶,雷达技术等也更贴近于人们生活,需求也逐日递增。而这些产品无一例外离不开时间测量,对于时间测量核心部分便是tdc(高精度时间测量)。ms1004是一款新型高精度高速时间测量芯片,具有的高集成化,高精度,高速度,多目标测量,操作简单等特点,极大的适应于各种高速激光雷达系统,提供了一个完美的解决方案。
3.目前激光雷达方案中大都用高速fpga1(现场可编程门阵列)来实现tdc(时间数字转换器)的功能,由于fpga1的精度低、成本高,开发难度大等原因无法广泛应用。还有个别应用国外的高速tdc(时间数字转换器),由于国外芯片工艺落后、采购成本高等原因,也无法得到广泛应用。
4.传统的激光雷达方案基本使用fpga1(现场可编程门阵列)来完成的,通过fpga1内部器件的延时从完成时间计量,但由于fpga1器件内部延时过大,一般都为纳秒级别,系统的精度较低,且fpga1的成本以及开发难度都较大,只能在小部分领域内才能应用。部分厂家也会选用一些国外产的tdc产品,但国外产的tdc版本落后,采购难度较大,且成本较高,大规模应用难度也较大。
5.为此,需要一种精度更高、速度更快、实现效果更好的高速雷达装置。
技术实现要素:
6.有鉴于此,本实用新型的目的在于提供一种高速雷达装置,精度更高、速度更快、实现效果更好。其具体方案如下:
7.一种高速雷达装置,包括:fpga1和与所述fpga1连接的ms1004芯片组2;
8.所述ms1004芯片组2中的每个ms1004芯片通过spi接口与所述fpga1连接,所述ms1004芯片的en_start管脚与所述fpga1连接;
9.所述fpga1的脉冲输出端与所述ms1004芯片的start管脚、stop1管脚和stop2管脚连接;
10.所述ms1004芯片的rstn管脚与所述fpga1连接,用于接收fpga1发送的接收复位信号;
11.所述ms1004芯片的intn管脚与所述fpga1连接,以便fpga1根据intn管脚的信号进行读操作;
12.所述ms1004芯片的ssn管脚、sck管脚、miso管脚和mosi管脚作为四线中断与所述fpga1相连。
13.可选的,所述ms1004芯片的vcc管脚分别与vcc端和第一电容c1的一端连接,所述第一电容c1的另一端接地;
14.所述ms1004芯片的第一vdd管脚vdd1分别与vdd端和第二电容c2的一端连接,所述第二电容c2的另一端接地;
15.所述ms1004芯片的xin管脚分别与第三电容c3的一端、第一电阻r1的一端和所述高速晶振xtal的一端连接,所述第三电容c3的另一端接地;
16.所述ms1004芯片的xout管脚分别与第四电容c4的一端、所述第一电阻r1的另一端和所述高速晶振xtal的另一端连接,所述第四电容c4的另一端接地。
17.可选的,所述ms1004芯片的en_stop1管脚和en_stop2管脚均与vcc端连接。
18.可选的,所述ms1004芯片的gnd管脚均接地。
19.可选的,所述ms1004芯片的第二vdd管脚vdd2与vdd端连接。
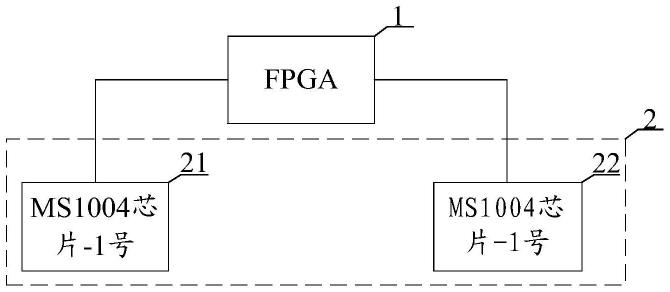
20.可选的,所述ms1004芯片组2包括分别与所述fpga1连接的两个ms1004芯片连接,所述fpga1以利用两个ms1004芯片进行并行测量。
21.可选的,两个ms1004芯片分别用于测量同一信号源的上下边沿信号。
22.本实用新型中,高速雷达装置,包括:fpga1和与所述fpga1连接的ms1004芯片组2;所述ms1004芯片组2中的每个ms1004芯片通过spi接口与所述fpga1连接,所述ms1004芯片的en_start管脚与所述fpga1连接;所述fpga1的脉冲输出端与所述ms1004芯片的start管脚、stop1管脚和stop2管脚连接;所述ms1004芯片的rstn管脚与所述fpga1连接,用于接收fpga1发送的接收复位信号;所述ms1004芯片的intn管脚与所述fpga1连接,以便fpga1根据intn管脚的信号进行读操作;所述ms1004芯片的ssn管脚、sck管脚、miso管脚和mosi管脚作为四线中断与所述fpga1相连。
23.本实用新型利用ms1004配合fpga1搭建雷达装置,利用ms1004精度高、速度快和测量范围大等特点,构建了具备精度高、速度快和测量范围大等特点的雷达装置。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
25.图1为本实用新型实施例公开的一种高速雷达装置结构示意图;
26.图2为本实用新型实施例公开的另一种高速雷达装置结构示意图;
27.图3为本实用新型实施例公开的ms1004结构示意图;
28.图4为本实用新型实施例公开的一种采用ms1004的双高速雷达装置结构示意图;
29.图5为本实用新型实施例公开的一种采用ms1004时ms1004工作流程示意图。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.本实用新型实施例公开了一种高速雷达装置,参见图1所示,该装置包括:fpga1和
与所述fpga1连接的ms1004芯片组2;
32.所述ms1004芯片组2中的每个ms1004芯片通过spi接口与所述fpga1连接,所述ms1004芯片的en_start管脚与所述fpga1连接;
33.所述fpga1的脉冲输出端与所述ms1004芯片的start管脚、stop1管脚和stop2管脚连接;
34.所述ms1004芯片的rstn管脚与所述fpga1连接,用于接收fpga1发送的接收复位信号;
35.所述ms1004芯片的intn管脚与所述fpga1连接,以便fpga1根据intn管脚的信号进行读操作;
36.所述ms1004芯片的ssn管脚、sck管脚、miso管脚和mosi管脚作为四线中断与所述fpga1相连。
37.具体的,fpga1作为主控芯片控制ms1004芯片工作,构建一个高速雷达装置,ms1004芯片组2可以包括一个ms1004芯片或两个ms1004芯片,参见图2所示,fpga1可以通过与一个ms1004芯片连接,搭建一个高速雷达装置,参见图3所示,当然也可以与两个ms1004芯片连接,采用乒乓测量的方式,搭建一个高速雷达装置,可以充分利用fpga1高速以及并行的特点最大程度发挥ms1004的测量速度。
38.具体的,参见图4所示,因采用乒乓测量方式,所以ms1004芯片组2中每个ms1004芯片与fpga1的连接关系各管脚用途以及外部电路均一致,因此,本实用新型实施例着重介绍单个ms1004的连接关系以及架构。
39.具体的,ms1004通过spi接口与fpga1进行通信,共ssn,sck,miso和mosi四线中断,共3个使能端,en_start,en_stop1和en_stop2分别控制start,stop1,stop2这三个信号脚的使能,其中en_start脚由fpga1控制,en_stop1和en_stop2上拉至高电平。高速时钟部分ms1004外接一个4m高速晶振xtal用于时间测量。脉冲部分由fpga1产生脉冲给到ms1004,用于模拟实际光路信号。当采用两颗ms1004芯片以乒乓测量的方式运行时,每颗芯片外围完全相同,fpga1产生脉冲信号同时给到两个芯片的start,stop1和stop2端。
40.具体的,参见图5所示,进行复位与配置寄存器操作时,ms1004通过rstn脚拉低实现硬件复位,再通过spi口发送0x50命令进行软件复位。完成复位操作后rstn为高电平,配置32位配置寄存器。ms1004-1号芯片21en_start脚默认输入高电平,ms1004-2号芯片22en_start脚默认输入低电平。该操作仅需在系统上电时进行一次,后续连续测量过程中无需进行。
41.具体的,参见图5所示,初始化操作时,fpga1通过spi口发送0x70命令实现初始化操作(ms1004可以通过寄存器配置为快速初始化模式,快速初始化模式下这一步骤可以省略)对于ms1004-1号芯片21的en_start脚,若ms1004-2号芯片22的en_start脚为低,ms1004-1号芯片21en_start脚输入高电平;对于ms1004-2号芯片22的en_start脚,若ms1004-1号芯片21的en_start脚为低,ms1004-2号芯片22en_start脚输入高电平。这样可以保证每次脉冲有且仅有一个芯片进行测量。
42.具体的,参见图5所示,接收脉冲并等待中断时,ms1004在完成测量操作后intn脚会拉低,fpga1识别到这个低电平后进行后续的读操作,将相应的en_start脚拉低。
43.具体的,参见图5所示,fpga1读取状态寄存器时,ms1004有24位状态寄存器,可以
通过状态寄存器判断是否发生溢出且收到几个脉冲。若在快速初始化模式下,这一步骤可省略。
44.具体的,参见图5所示,fpga1读取结果寄存器时若ms1004没有溢出,可以通过发送相应地址指令读取结果寄存器,stop1十个脉冲对应地址命令为b0—b9,stop2十个脉冲对应地址命令为c0—c9。
45.具体的,图5中介绍了ms1004-1号芯片21和ms1004-2号芯片22各自执行的过程与流程。
46.具体的,ms1004精度高,ms1004最小精度可达到23ps,测距精度约0.3cm,极适合于激光雷达领域;ms1004速度快,ms1004因其测量流程简单,且spi的通信速度更快,一般测量速度最大可达到100khz/s以上,且在一些特殊应用条件下可以更快;ms1004测量范围大,ms1004最大测量时间可以达到20us,即测距范围最大可以实现3km的测量。应用范围广,从扫地机器人到望远镜,均能较好的使用;ms1004能够实现多目标测量,最大可以实现10个回波的测量,在存在干扰环境下也能实现对正确目标的采集与测量,且可以在回波数没有达到预期条件下的测量。
47.具体的,当采用两个ms1004与fpga1连接时,可以参见图4所示的ms1004与fpga1管脚之间的连接关系,ms1004各管脚与fpga1的各io管脚连接,接收或发送相应的信号实现相应的功能。
48.可见,本实用新型实施例利用ms1004配合fpga1搭建雷达装置,利用ms1004精度高、速度快和测量范围大等特点,构建了具备精度高、速度快和测量范围大等特点的雷达装置。
49.具体的,所述ms1004芯片的vcc管脚分别与vcc端和第一电容c1的一端连接,所述第一电容c1的另一端接地;
50.所述ms1004芯片的第一vdd管脚vdd1分别与vdd端和第二电容c2的一端连接,所述第二电容c2的另一端接地;
51.所述ms1004芯片的xin管脚分别与第三电容c3的一端、第一电阻r1的一端和所述高速晶振xtal的一端连接,所述第三电容c3的另一端接地;
52.所述ms1004芯片的xout管脚分别与第四电容c4的一端、所述第一电阻r1的另一端和所述高速晶振xtal的另一端连接,所述第四电容c4的另一端接地。
53.具体的,所述ms1004芯片的en_stop1管脚和en_stop2管脚均与vcc端连接。
54.具体的,所述ms1004芯片的gnd管脚均接地。
55.具体的,所述ms1004芯片的第二vdd管脚vdd2与vdd端连接。
56.具体的,两个ms1004芯片可以分别用于测量同一信号源的上下边沿信号,例如,ms1004-1号芯片21用于测量信号源的上沿信号,ms1004-2号芯片22用于测量信号源的下沿信号。
57.对所公开的实施例的上述说明,使本领域技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1