软化组织检测方法与流程
1.本发明涉及金属部件中存在的软化组织的检测方法。
2.本技术基于2020年4月14日向日本国特许厅申请的日本特愿2020-072227号主张优先权,并将其内容引用于此。
背景技术:
3.近年来,例如在火力发电设备中使用的高温蒸汽配管(高铬钢配管)的焊接部或母材的热影响部(haz部:heat affected zone)中产生软化组织的事例已有报道(例如参照非专利文献1)。在这样的高温、高压条件下使用的金属部件中产生的软化组织与通常区域(母材及焊接金属)相比,硬度显著降低,其晶粒也粗大化。由此,由于该软化组织的存在,金属部件的强度有可能降低,预想到非破坏地检测软化组织的需求今后会提高。
4.此外,作为非破坏地检查金属部件的方法,以往已知有超声波探伤(ut:ultrasonic testing)(参照专利文献1)。在超声波探伤中,从探伤器向例如作为高温蒸汽配管的焊接部等的检查的检查对象发送(波发送)超声波的短脉冲信号,并且接收该反射波(回波信号)而进行分析。由此,能够进行检查对象内有无缺陷和进行位置的推定。
5.现有技术文献
6.专利文献1:日本特开2018-205033号公报
7.非专利文献1:张圣德等6名,“软化组织对9cr钢长期使用材料的焊接接头的蠕变强度的影响”,第57次高温强度研讨会前刷集,2019年12月5~6日,p.46-50
技术实现要素:
8.发明所要解决的课题
9.但是,现状是不存在非破坏地检测在金属组织的内部析出的软化组织的技术的报告。用于检测微观裂纹和蠕变空隙(空洞)等缺陷的研究事例有很多(专利文献1等),但现状是没有以软化组织那样的非空洞的材料组织的检测为目的的研究事例。
10.关于这一点,本发明者们通过深入研究发现,为了能够进行基于超声波探伤的软化组织的检测,需要使用与形成软化组织的晶粒的粒径对应的波长的超声波,如果不这样,则照射的超声波的来自软化组织的反射波(回波信号的时间推移)的信号值较小,无法检测出软化组织(参照后述的图5a~图5b)。即,发现在通过超声波探伤来检测软化组织时,形成能够检测的软化组织的晶粒的粒径与超声波的波长(频率)之间具有较强的相关性。
11.鉴于上述的情况,本发明的至少一个实施方式的目的在于提供用于检测存在于金属的内部的软化组织的软化组织检测方法。
12.用于解决课题的技术方案
13.本发明的至少一个实施方式所涉及的软化组织检测方法是用于通过超声波探伤来检测金属部件的检查对象内的软化组织的软化组织检测方法,
14.所述软化组织检测方法具备如下的步骤:
15.设定步骤,设定形成所述软化组织的晶粒的假想粒径;
16.决定步骤,以满足超声波条件的方式决定设定频率,所述超声波条件规定了所述假想粒径与用于所述超声波探伤的超声波的频率即所述设定频率之间的关系;
17.探伤步骤,通过具有所述设定频率的所述超声波,执行对于所述检查对象的所述超声波探伤;及
18.判定步骤,根据所述超声波探伤的执行结果,判定所述检查对象内有无所述软化组织。
19.发明效果
20.根据本发明的至少一个实施方式,提供用于检测存在于金属的内部的软化组织的软化组织检测方法。
附图说明
21.图1是概略地表示本发明的一个实施方式所涉及的超声波探伤系统的结构的图。
22.图2是表示对在壁厚方向上断续的软化组织进行本发明的一个实施方式所涉及的超声波探伤的情况的图。
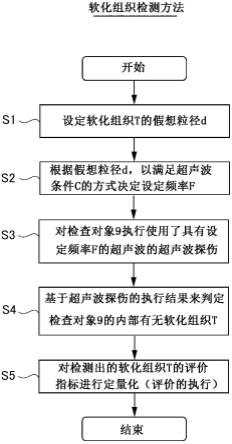
23.图3是表示本发明的一个实施方式所涉及的软化组织检测方法的图。
24.图4是表示本发明的一个实施方式所涉及的由多个晶粒形成的软化组织的示意图。
25.图5a是表示本发明的一个实施方式所涉及的超声波的波长与来自软化组织的回波信号高度的关系的图。
26.图5b是表示本发明的一个实施方式所涉及的超声波的设定频率与来自软化组织的回波信号高度的关系的图。
27.图6是表示本发明的一个实施方式所涉及的超声波的反射波的频率特性的图,实线表示软化组织的情况,虚线表示缺陷的情况。
28.图7是表示本发明的一个实施方式所涉及的判定步骤的图,表示基于有无高频率侧偏移的判定流程。
29.图8是表示本发明的一个实施方式所涉及的判定步骤的图,表示基于频率特性的形状的判定流程。
30.图9是表示本发明的一个实施方式所涉及的判定步骤的图,表示基于剪切波的传播速度的判定流程。
31.图10是表示本发明的一个实施方式所涉及的判定步骤的图,表示基于与超声波探伤的使用频率对应的响应特性的判定流程。
32.图11a是例示本发明的一个实施方式所涉及的反射源是软化组织的情况下的回波信号的反射方向的图,不具有指向性。
33.图11b是例示本发明的一个实施方式所涉及的反射源是缺陷的情况下的回波信号的反射方向的图,具有指向性。
34.图12是表示本发明的一个实施方式所涉及的判定步骤的图,表示基于回波信号的有无指向性的判定流程。
具体实施方式
35.以下,参照附图对本发明的几个实施方式进行说明。但是,作为实施方式记载的或附图所示的构成部件的尺寸、材质、形状、其相对的配置等并不是将本发明的范围限定于此的意思,只不过是简单的说明例。
36.例如,“某方向”、“沿着某方向”、“平行”、“正交”,“中心”、“同心”或“同轴”等表示相对或绝对配置的表述不仅严格地表示这样的配置,还表示具有公差或能够得到相同功能的程度的角度或距离而相对位移的状态。
37.例如,“相同”、“相等”、“均质”等表示事物相等的状态的表述不仅表示严格相等的状态,还表示存在公差或能够得到相同功能的程度的差的状态。
38.例如,四边形状或圆筒形状等表示形状的表述不仅表示几何学上严格意义上的四边形状或圆筒形状等形状,而且在能够得到相同效果的范围内,还表示包含凹凸部或倒角部等的形状。
39.另一方面,“装备”、“拥有”、“具备”、“包含”、“具有”一个构成要素这样的表述不是排除其他构成要素的存在的排他的表现。
40.图1是概略地表示本发明的一个实施方式所涉及的超声波探伤系统1的结构的图。图2是表示对在壁厚方向上断续的软化组织t进行本发明的一个实施方式所涉及的超声波探伤的情况的图。图3是表示本发明的一个实施方式所涉及的软化组织检测方法的图。图4是表示本发明的一个实施方式所涉及的由多个晶粒g形成的软化组织t的示意图。图5a是表示本发明的一个实施方式所涉及的超声波的波长λ与来自软化组织t的回波信号高度的关系的图。另外,图5b是表示本发明的一个实施方式所涉及的超声波的设定频率f与来自软化组织t的回波信号高度的关系的图。
41.软化组织检测方法是用于检测存在于金属材料的软化组织t的方法。更具体而言,软化组织检测方法例如通过超声波探伤(ut:ultrasonic testing)对金属部件中的检查对象9的部位(以下,简称为检查对象9)内的软化组织t进行检测的方法。上述的金属部件也可以是例如高铬钢配管等配管。另外,检查对象9也可以包含配管的焊接部(焊接金属)及其母材的热影响部(haz部:heat affected zone)中的至少一方。
42.首先,对上述的超声波探伤系统1及测定条件进行说明,如图1所示,超声波探伤系统1具备:探伤器2,具有用于发送超声波的发送器2s及用于接收超声波的回波信号(反射波)的接收器2r;测定装置3,在从上述的发送器2s发送了超声波(超声波脉冲)后,使用接收器2r测定(观测)回波信号的信号电平(以下,称为回波信号电平),从而生成反射波的信号数据sm;及处理装置4,基于在检查对象9的多个测定位置pm分别测定的多个信号数据sm基于例如进行開口合成处理等公知的探伤原理生成音响图像i。
43.更详细而言,在上述的发送器2s及接收器2r中组装有用于产生或接收超声波的探头(传感器)。另外,测定装置3在从发送器2s发送了超声波(超声波脉冲)后,使用接收器2r测定超声波的反射波的信号电平,由此生成从来自发送器2s的超声波的发送时起在预定期间内观测到的回波信号电平的时间推移、即信号数据sm(t)(时间序列数据。以下,适当称为sm)。另外,通过对检查对象9的多个(m个)测定位置pm(m=1、2、
···
、m。以下相同。)分别进行探伤器2的设置(移动),对这些测定位置pm中的每一个进行这样的测定,由此得到图1所示的m个信号数据sm。另外,处理装置4通过将生成的音响图像i输出到显示器(图1)或打印
机等能够视觉化的显示装置12,来显示音响图像i。
44.此外,图1的例示表示在检查对象9中存在软化组织t的情况。软化组织t与检查对象9的母材物性不同,成为超声波的反射源。由此,从发送器2s发送的超声波在反射源被反射,由接收器2r接收其反射波,因此存在信号电平的变化大的部位(反射源回波)。另外,各信号数据sm在互不相同的测定位置被测定,因此各信号数据sm中的反射源回波的位置产生偏移。在反射源是缺陷h的情况下也相同。另外,上述的t例如是从超声波的发送时起的经过时间。
45.在这样的超声波探伤系统1中,在软化组织t的检测中,组装在上述的发送器2s及接收器2r中的探头(传感器)可以是公知的探头,但组装的探头的数量可以是一个,也可以是组装有多个的阵列探头。但是,为了检测较小的区域的软化组织t,最好使用声压较强的(灵敏度较高的)聚焦波束b进行探伤,也可以使用聚焦型探头或阵列探头。探伤原理只要应用一般的脉冲回波法、间距捕获法、相控阵法、开口合成法、fmc/tfm(全矩阵捕获/总聚焦方法)、pwi(平面波成像)等即可。此外,如上所述,在脉冲回波法或间距捕获法中使用聚焦探头更好。另外,在相控阵法、开口合成法、fmc/tfm、pwi法中,使用阵列探头更好。
46.另外,聚焦探头存在难以以高灵敏度检查金属材料内部整个区域的课题,因此也可以设计/应用与壁厚方向的检查范围对应的聚焦探头,或者使用折射率可变型的延迟材料向任意位置发送聚焦波束b来进行探伤。在此,为了提高检测灵敏度,最好在探头的长轴方向上赋予曲率而使其聚焦。此外,也可以使用折射率可变型的延迟材料来任意变更聚焦深度。
47.另外,近年来,报告了在焊接金属内或坡口面上,在壁厚方向(图1中的z方向。以下相同)上断续地或连续地检测软化组织t的可能性(参照图2)。但是,这样的软化组织t难以用焊接部检查中一般使用的斜角超声波探伤法进行检测。该斜角超声波探伤法相对于检查对象9倾斜地入射超声波,检查焊接部。因此,可以通过从成为焊接金属内或坡口面等的检查对象9的上表面(外表面)垂直地发送超声波来进行检查的方法或例如在金属部件为配管的情况下在其周向上入射超声波来检测软化组织t的方法来进行。在从焊接的上方发送超声波的情况下,可以在磨削焊接堆高使其平坦后进行探伤,也可以使用自适应超声波探伤。自适应超声波探伤使在保持焊接堆高的状态下入射超声波,对堆高形状的折射影响进行修正的波形处理组合的探伤方法。
48.并且,为了在从表层到深层部的整个区域检查在上述的壁厚方向上断续(连续)的软化组织t,需要向深层部入射强力的超声波束来(参照图2)进行检查。因此,在几个实施方式中,超声波探伤的探伤器2构成为从检查对象9的表面沿着深度方向(图1的z方向)照射超声波。更详细而言,使用点聚焦型垂直探头,从焊接上方入射聚焦波束b。此时,使检查的深度与波束聚焦深度一致来进行探伤。为了任意地变更检查深度来对整个区域进行探伤,可以使用聚焦深度不同的聚焦探头,或者也可以使用折射率可变型的延迟材料对任意位置赋予聚焦波束b来进行探伤。
49.另外,在使用阵列探头的影像化方法中,pwi更好。阵列探头由多个微小振子排列而构成的,但pwi是从所有的微小振子发送同时激励的波形,再构筑该波形,对检查对象9的内部进行成像的方法。在此,通过与自适应超声波探伤逻辑组合,在保持焊接堆高的状态下进行pwi成像,从而能够节省堆高磨削的时间。由此,即使在软化组织t沿着深度方向呈层状
地产生的情况下,也能够高精度地检测软化组织t。
50.上述的超声波探伤系统1及在测定条件下等执行的软化组织检测方法如图3所示,具备设定步骤s1、决定步骤s2、探伤步骤s3及判定步骤s4,按照该顺序执行。
51.按照图3的步骤顺序对软化组织检测方法进行说明。
52.设定步骤s1是在假定检查对象9的内部存在软化组织t的情况下,设定形成该软化组织t的晶粒g可能具有的粒径的假想值(以下,称为假想粒径d)的步骤。如图4所示,通常,软化组织t由多个晶粒g形成。该晶粒g的粒径(以下,称为晶粒直径)在该时间点并不确定,但置于任意的环境下的检查对象9可能产生的软化组织t的晶粒直径能够根据置于相同的环境下的同种检查对象的过去事例或模拟(数值解析)等来设想。并且,根据这样的过去事例等,将假设在检查对象9内存在软化组织t的情况下设想的晶粒直径设定为上述的假想粒径d。在一个实施方式中,假想粒径d可以为100μm以上。
53.在图4的例示中,相对较大的多个晶粒g聚集的区域(部分)是软化组织t,与软化组织t相邻(图4的下部)地存在的相对较小的晶粒聚集的区域是不存在软化组织t的检查对象9的母材部分(以下,称为通常组织tm)。并且,形成软化组织t的晶粒g的晶粒直径为100μm~200μm左右(平均为150μm左右)。由此,图4所示的金属组织是与检查对象9同种的部位相关的过去事例或模拟结果,则可以将上述的假想粒径d设定为100μm~200μm之间的任意的值,也可以设定为该数值范围外的附近的值。
54.决定步骤s2是以满足预先确定的超声波条件c的方式决定与上述的假想粒径d对应的设定频率f的步骤,该超声波条件c确定了假想粒径d与作为用于超声波探伤的超声波的频率的设定频率f的关系。这是因为,本发明者们通过深入研究发现,为了能够进行基于超声波探伤的软化组织t的检测,需要使用与形成软化组织t的晶粒g的粒径对应的波长的超声波,如果不这样,则即使在照射的超声波从检查对象9内的反射源反射而观测(接收)到的回波信号的时间推移(以下,称为反射波)包含来自软化组织t的回波信号的情况下,其信号电平也较小,无法检测到软化组织t(参照图5a~图5b)。即,在通过超声波探伤检测软化组织t时,发现形成能够检测的软化组织t的晶粒的粒径与超声波的波长(频率)之间具有较强的相关性。
55.具体而言,在几个实施方式中,上述的超声波条件c是与上述的设定频率f对应的超声波的波长λ(λ=v/f)(v:超声波的音速)为假想粒径d的2倍以下(λ≤2d)。由此,在决定步骤s2中,以满足该超声波条件c的方式,基于假想粒径d来决定设定频率f。例如,若将常数α设为具有能够任意决定的0以上的值的常数,则可以使用λ=2d-α这样的计算式来计算超声波的波长λ,并计算设定频率f。
56.例如,在图5a~图5b中,横轴表示超声波的波长λ,纵轴表示回波信号电平相对于最大的回波信号电平的比例即回波信号高度。在图5a的例示中,在超声波探伤中使用的超声波的波长λ(横轴)大致大于2d左右的情况(λ>2d)下,纵轴所示的回波信号的回波信号高度为0附近,但当波长λ大致为2d以下时,回波信号高度上升到能够根据基本回波(噪声)来判别的程度。而且,波长λ越短,表现出回波信号高度越大的倾向。
57.另外,图5b的例示将图5a的波长λ转换为频率(频率=1/λ),但与图5a相同地,以大致相当于2d的频率即1/2d为界,在低频侧为0%的回波信号高度在高频侧从基本回波(噪声)上升到能够判别的程度。而且,表现出频率越高,则回波信号高度越高的倾向。此外,在
图5a~图5b中,设为2d=300~400μm,将观测到的回波信号电平为基本回波(噪声)以下作为不能评价的情况,设为0%。
58.这样,通过使与设定频率f对应的波长λ满足上述的超声波条件c,能够更可靠地检测出存在于检查对象9内的软化组织t。在图4的例示中,如果将多个晶粒g中的晶粒直径较小的一方的值(具体为100μm等)设定为假想粒径d,则能够更高精度地检测软化组织t整体。
59.探伤步骤s3是利用具有在上述的决定步骤s2中决定的上述的设定频率f的超声波来执行对检查对象9的超声波探伤的步骤。即,使用图1~图2所示的超声波探伤系统1,从探伤器2从检查对象9的多个的位置分别照射(发送)具有设定频率f(波长λ)的超声波,并且根据表示来自照射的超声波的反射源的反射信号(回波信号)的时间推移(反射波)的信号数据sm,来检测存在于检查对象9内的软化组织t、裂纹或蠕变空隙(空洞)等的缺陷h(内部缺陷)与母材的界面的存在。
60.此外,既可以将探头的中心频率设定为满足上述的超声波条件c,也可以使宽频带频率传感器的频带整体满足上述的超声波条件c。向波长的换算考虑超声波探伤中使用的纵波或横波的差异。
61.判定步骤s4是基于在上述的探伤步骤s3中执行的超声波探伤的执行结果来判定检查对象9内有无软化组织的步骤。通过使用具有设定频率f的超声波来执行超声波探伤,而在检查对象9内存在软化组织t的情况下,如已经说明的那样,来自具有与通常组织tm不同种界面的软化组织t的回波信号电平变高到能够由探伤器2检测出的程度,因此能够检测出其存在。
62.在图3所示的实施方式中,软化组织检测方法还具备计算包含软化组织t的尺寸及检查对象9内的位置中的至少一方的评价指标的评价步骤s5。并且,在显示装置12上显示音响图像i时,一起显示在该评价步骤s5中计算出的评价指标。
63.更具体而言,在该评价步骤s5中,实施超声波探伤成像,得到将超过任意的回波信号高度的反射源即软化组织t图像化的截面映射图像。并且,根据该图像得到软化组织t的尺寸(高度、宽度、深度)。例如,通过从图像提取软化组织t或对软化组织t进行二值化,能够得到尺寸或体积。另外,在探伤器2使用聚焦型探头的情况下,前后左右进行扫描,利用折射率可变型楔形进行波束扫描,仅记录满足任意的基准的回波信号高度的回波信号,由此能够确定软化组织t的尺寸。
64.另外,评价指标也可以包含检查对象9内的软化组织t的比例(软化组织t相对于检查对象9的壁厚的比例)。具体而言,通过使用阵列探头,记录用上述的成像方法得到软化组织t的部分的范围,能够得到上述的比例。更具体而言,通过从检查对象9实施垂直超声波探伤,而能够取得壁厚方向上的波形,因此通过根据该波形信息求出软化组织t中包含特有的波形的比例,能够求出软化组织t相对于壁厚的生成比例。另外,如后所述,通过观察基于软化组织t的剪切波的传播速度的变化,也能够主要求出上述的比例。具体而言,通过测量相对于板厚方向的传播速度的变化量,除以板厚,能够求出软化组织t的生成比例。
65.根据上述的结构,基于在金属部件的检查对象9内产生软化组织t的情况下所设想的形成软化组织t的晶粒的粒径(假想粒径d),决定超声波探伤中使用的超声波的频率(设定频率f),以满足超声波条件c。并且,通过使用所决定的设定频率f的超声波探伤来测定检查对象9,并根据其结果来判定有无软化组织。由此,能够非破坏地检测存在于检查对象9内
的软化组织t。
66.接下来,对与上述的判定步骤s4相关的几个实施方式进行说明。
67.通过使用上述的设定频率f的超声波探伤,能够检测出软化组织t(非空洞的组织),但在该方法中,除了软化组织t以外,还能够检测出缺陷h(内部缺陷)。即,通过超声波探伤检测出的超声波的反射源实际上可以是软化组织t,也可以是缺陷h。因此,需要用于识别所检测出的反射源是否是软化组织t的识别方法。
68.以下,使用图6~图11b依次说明与识别方法相关的五个实施方式。此外,下述的五个实施方式可以分别单独使用,也可以分别实施其中的多个,例如在实施的全部的识别方法的结果相同的情况下,采用该识别结果,或者使用品质工学方法(例如,mt法)输出最终的识别结果等,进行组合。
69.(1.通过超声波的反射波的频率特性的分析的识别方法)
70.图6是表示本发明的一个实施方式所涉及的超声波的反射波的频率特性的图,实线表示软化组织t的情况,虚线表示缺陷的情况。另外,图7是表示本发明的一个实施方式所涉及的判定步骤s4的图,表示基于有无高频率侧偏移的判定流程。
71.本发明者们通过深入研究发现,根据反射超声波的检查对象9内的反射源是否是软化组织t,而超声波的反射波的频率特性(频谱)产生差异(参照图6)。具体而言,如图6所示,在存在软化组织t的情况下,与不存在软化组织t的情况相比,频率特性中的峰值(强度峰值)整体向高频率侧偏移(以下,将其称为高频率侧偏移)。另外,软化组织t通常由多个晶粒g构成,如图6所示,来自软化组织t的频率特性的形状为林状,存在多个峰值,与此相对,来自缺陷的频率特性的形状为山状,其峰值数为大概一个左右。
72.因此,在几个实施方式中,也可以通过判定上述的频率特性有无高频率侧偏移(参照图6)来进行上述的识别。具体而言,如图7所示,判定步骤s4可以具有:对象特性取得步骤s71,取得对检查对象9照射的超声波的反射波的频率特性(以下,称为对象频率特性dt);第一解析步骤s72,求出该对象频率特性dt中的存在峰值的频率的位置(峰值位置)的评价值(以下,称为对象峰值位置vp);第一识别步骤s73(s73a~s73c),取得在成为对象频率特性dt的原因的反射源为缺陷h的情况下得到的超声波的反射波的频率特性(以下,称为参照频率特性dr。参照图6)的峰值位置的评价值(以下,称为参照峰值位置vr),并且在对象峰值位置vp为具备比参照峰值位置vr大的值的第一阈值la以上的情况(vp>la>vr)下,识别为上述的反射源是软化组织t。
73.上述的对象频率特性dt通过对反射波进行fft(fast fourier transform:快速傅里叶变换)等傅里叶变换而得到。上述的对象峰值位置vp是用于判定有无上述的高频率侧偏移的指标。对象峰值位置vp及参照峰值位置vr各自的峰值位置例如可以是中心频率,也可以是具有最大的强度的峰值位置等。另外,上述的第一阈值la例如也可以通过对参照峰值位置vr乘以或加上预定的系数β(β>1)等来确定。
74.另外,上述的参照峰值位置vr能够通过模拟或对具有内部缺陷的标准试验片执行超声波探伤来求出。具体而言,关于上述的模拟,通过上述的探伤步骤s3可知检查对象9中的反射源的位置和大小,因此也可以在能够进行超声波探伤的模拟的检查对象9的数值模型中反映(设定)实际进行的上述的超声波探伤的测定条件,并且在通过实际进行的超声波探伤而检测出的反射源的位置(实际位置)设定缺陷h,来进行数值解析。关于标准试验片,
也可以对探伤器2与实际位置的相对位置关系相同的试验片执行超声波探伤。或者,也可以根据针对已知内部缺陷的位置的标准试验片的超声波探伤的执行结果,推定参照峰值位置vr,将该推定值作为参照峰值位置vr。
75.在图7所示的实施方式中,在步骤s71中取得对象频率特性dt,在步骤s72中,计算中心频率作为所取得的对象频率特性dt的对象峰值位置vp。并且,在步骤s73中,执行第一识别步骤s73。具体而言,在步骤s73a中,判定对象峰值位置vp是否为第一阈值la以上。在本实施方式中,将上述的系数β设为1.2(β=1.2),而将第一阈值la确定为1.2
×
β(la=β
×
vr)。并且,在步骤s73a中vp<tla的情况下,在步骤s73b中,将超声波的反射源识别为缺陷h。相反,在步骤s73a中vp≥ta的情况下,在步骤s73c中将超声波的反射源识别为软化组织t。
76.即,在图7所示的实施方式中,将从参照峰值位置vr(该情况为中心频率)向高频率侧偏移了相当于β的比例(在图7为20%)以上的情况视为有意义的差,在满足该条件的情况下,将该反射源判定为软化组织t。本发明者们确认了通过将系数β确定为1.2的第一阈值la,而能够适当地进行反射源的识别。
77.根据上述的结构,计算成为超声波的反射波(反射波的信号)的频率特性的例如中心频率等的对象峰值位置vp。另外,根据在反射源不是软化组织t而是缺陷h的情况下可能得到的参照峰值位置vr来确定与该对象峰值位置vp进行比较的第一阈值la,在对象峰值位置vp为第一阈值la以上的情况(vp≥la>vr)下,识别为通过超声波探伤所检测出的反射源是软化组织t。由此,能够适当地识别上述的反射源是非空洞的软化组织t还是缺陷h,能够适当地检测出存在于检查对象9内的软化组织t。
78.在其他几个实施方式中,也可以通过判定上述那样的反射波的频率特性是否呈现林状回波的样态来进行上述的识别。
79.图8是表示本发明的一个实施方式所涉及的判定步骤s4的图,表示基于频率特性的形状的判定流程。
80.具体而言,如图8所示,判定步骤s4可以具有:对象特性取得步骤s81(与s71相同),取得对检查对象9照射的超声波的反射波的对象频率特性dt;第二解析步骤s82,进行该对象频率特性dt的形状评价;及第二识别步骤s83(s83a~s83c),基于该形状评价的结果,识别成为对象频率特性dt的原因的反射源是否是软化组织t。即,在第二识别步骤s83中,形状评价的结果是,在对象频率特性的形状为林状的情况下,识别为反射源是软化组织t,在例如为山状等不是林状的情况下,识别为反射源为不是软化组织t的例如缺陷h。
81.关于上述的形状评价的具体的评价方法,可以考虑各种方法。例如,在几个实施方式中,也可以统计对象频率特性dt中的峰值数。在统计峰值数时,例如也可以统计具有最大的强度的预定比例(例如50%等)以上的强度的峰值的数量。并且,也可以在峰值数为2以上的预定数量的第二阈值以上的情况下,判定为对象频率特性的形状为林状。例如,由于来自缺陷的反射波的频率特性中存在的峰值数大致为1个左右,因此考虑到成为2个的可能性,上述的第二阈值例如也可以是3。另外,例如在检查对象9包含焊接部的情况下,由于根据焊接条件而产生来自再结晶的噪声回波,因此在反射波中也包含噪声回波。考虑到这样的情况,也可以根据检查对象9中的噪声回波的状态(焊接条件)将第二阈值设为比3大的数。
82.在其他几个实施方式中,也可以通过对对象频率特性dt进行平滑化处理来生成平
滑化的分布(平滑化频率特性),并且通过统计该平滑化频率特性的强度为第三阈值以上的点,来判定对象频率特性dt是否是林状。在该情况下,第三阈值也可以根据检查对象9中的噪声回波的状态(焊接条件)来设定。平滑化处理例如使用移动平均等公知的方法即可。
83.在其他几个实施方式中,在反射波中包含来自软化组织t的回波信号和来自缺陷的回波信号的情况下,也可以仅提取前者后,通过先前说明的评价方法来进行形状评价。具体而言,在几个实施方式中,例如也可以使用高斯函数、洛伦兹函数、福格特函数等具有吊钟型形状的多个函数(以下,成为吊钟型型函数)来制作与对象频率特性dt近似的形状,使用该形状从对象频率特性dt提取来自软化组织t的回波信号。
84.例如,在将对象频率特性dt的峰值数设为n的情况下,准备n+1个吊钟型函数。并且,使其中的n个吊钟型函数的线宽(fwhm:full width at half maximum(半峰高宽度))相同,仅剩余的吊钟型函数的线宽与其他不同。并且,调整n+1个吊钟型函数的参数(线宽、峰值高度),使得与对象频率特性dt的差为规定值以下。其结果是,判断为在成为规定值以下的情况下的上述的线宽相同的n个吊钟型函数的合成波形来自软化组织t,而剩余的1个吊钟型函数来自缺陷h。在其他几个实施方式中,也可以仅用线宽窄的吊钟型函数的合成波形来近似对象频率特性dt的形状。
85.在图8所示的实施方式中,在步骤s81中取得对象频率特性dt,在步骤s82中,通过上述的多个实施方式中的至少一个,执行所取得的对象频率特性dt的形状评价。并且,在步骤s83中执行第二识别步骤s83。具体而言,在步骤s83a中,判定对象频率特性dt的形状是否是林状,在该形状不是林状的情况(山状的情况)下,在步骤s83b中将超声波的反射源识别为缺陷h。相反,在步骤s83a中,在该形状为林状的情况下,在步骤s83c中将超声波的反射源识别为软化组织t。
86.根据上述的结构,评价对象频率特性dt的形状,并且根据该评价结果,识别通过超声波探伤而检测出的反射源是否是软化组织t。由此,能够根据对象频率特性dt的形状,适当地检测存在于检查对象9内的软化组织t。
87.此外,在其他几个实施方式中,也可以组合基于高频率侧偏移的识别方法和基于频率特性的形状的识别方法,在任一方法中都得到相同的结果的情况下,可以采用该结果。另外,不仅从软化组织t直接反射的回波,而且透过软化组织t后的形状引起的反射回波(底面回波等)也可以采用本方法。而且,也可以扫描脉冲电压或脉冲宽度等超声波探伤时的设定参数,使用多个波形确认再现性,或实施基于响应性的不同的识别。由此,能够提高判定步骤s4的判定精度。
88.(2.基于软化组织t中的超声波的传播速度v(传播时间)的识别方法)
89.图9是表示本发明的一个实施方式所涉及的判定步骤s4的图,表示基于剪切波的传播速度v的判定流程。
90.软化组织t的机械性质与位于其周围的母材(金属组织)相比,硬度(杨氏模量)、弹性模量、密度ρ等物性值不同,其结果是声阻抗不同。另外,在作为其他技术领域的医疗领域中,通过在生物体组织内产生剪切波(弹性波),并测量该剪切波的传播速度v来测量生物体组织的硬度的方法已被实用化。因此,本发明者们考虑了通过对由超声波探伤检测出的超声波的反射源照射超声波脉冲而从反射源产生剪切波,并且根据该剪切波的传播速度v的测量结果来识别反射源是否是软化组织t。
91.具体而言,定性地说,如果假定密度ρ相同,则越是硬的组织,则传播速度v越快,越是柔缓的组织,则传播速度v越慢,因此根据与从反射源产生的剪切波的测量速度的比较,进行上述的识别。或者,根据剪切波的传播速度v、密度ρ、杨氏模量或刚性率的理论的关系式,计算杨氏模量或刚性率或密度ρ,根据其与母材或软化组织t的物性值的一致度,进行上述的识别。
92.因此,在几个实施方式中,如图9所示,上述的判定步骤s4具有:传播速度取得步骤s91,取得由超声波探伤检测出的超声波的反射源产生的剪切波的传播速度v;及第三识别步骤s92,根据由此取得的传播速度v来识别反射源是否是软化组织t。更详细而言,上述的传播速度取得步骤s91具有:剪切波生成步骤s91a,向由超声波探伤检测出的反射源照射聚焦超声波(聚焦波束b。以下相同);及速度测量步骤91b,测量通过执行步骤s91a而从反射源产生的剪切波的传播速度v。
93.作为提供上述的该聚焦超声波的具体的方法,可以使公知的方法中的任一种,例如可以使相控阵法或pwi等,也可以使用对探头提供曲率的聚焦型探头。可以对反射源提供聚焦波束(聚集波束),也可以提供通过延迟时间修正或折射率可变延迟材料等使聚焦位置在深度方向上断续地变化的聚焦波束b。
94.并且,当向反射源照射聚焦超声波时,反射源被该超声波激励而产生剪切波。在该剪切波的传播路径上的两个以上的多个的位置分别检测剪切波,根据在这些多个的位置检测出的剪切波的检测时间之差和传播距离之差,测量剪切波的传播速度v。在剪切波的位移测量中,能够利用在多普勒法等中使用的自相关法等。另外,为了测量各位置的局部的剪切波,也可以缩窄采样间隔或进行时移跟踪而以高速周期进行测量。
95.另外,例如,第三识别步骤s92也可以根据取得的传播速度v来计算反射源的硬度,并且根据计算出的反射源的硬度来识别反射源是否是软化组织t。已知剪切波的传播速度v等于剪切弾性系数(刚性率)
÷
密度ρ的平方根。另外,已知杨氏模量可以以3
×
ρ
×
传播速度v近似。或者,在第三识别步骤s92中,也可以在所取得的传播速度v比反射源不是软化组织t而是缺陷h的情况下可能得到的参照传播速度慢的情况下,识别为由超声波探伤检测出的反射源是软化组织t。参照传播速度也可以如下取得,向通过超声波探伤未检测出反射源的位置照射聚焦超声波,如上述那样测量由此产生的剪切波的传播速度v。
96.在图9所示的实施方式中,在步骤s91中,执行传播速度取得步骤s91。具体而言,在步骤s91a中,向上述的反射源照射聚焦超声波。在步骤s91b中,测量通过执行步骤s91a而从反射源产生的剪切波的传播速度v。由此,能够取得测量对象的传播速度v,因此,之后在步骤s92中,进行基于取得的传播速度v的反射源的识别。
97.根据上述的结构,测量通过对由超声波探伤检测出的超声波的反射源照射超声波而产生的剪切波的传播速度v,并且根据测量出的传播速度v来进行反射源是否是软化组织的识别。由此,能够适当地检测存在于检查对象9内的软化组织t。
98.(3.使用软化组织t的检测灵敏度不同的多个频率的识别方法)
99.图10是表示本发明的一个实施方式所涉及的判定步骤s4的图,表示基于与超声波探伤的使用频率对应的响应特性的判定流程。
100.如已经说明的那样,用于超声波探伤的超声波的频率需要满足超声波条件c(例如,λ≤2d)等,需要具有对软化组织t的检测灵敏度。相反地考虑,在通过超声波探伤检测到
反射源的情况下,若对该反射源执行使用了对软化组织t没有检测灵敏度的频率(λ>2d)的超声波探伤,则在反射源是软化组织t的情况下,不再检测到反射源。由此,本发明者们考虑了这样根据针对超声波探伤中使用的频率的响应特性的变化来识别反射源是否是软化组织t。
101.因此,在几个实施方式中,如图10所示,软化组织检测方法具有:参照探伤步骤s101,在通过上述的探伤步骤s3检测到超声波的反射源的情况下,利用具有不满足例如λ≤2d等的上述的超声波条件c的频率(即,满足λ>2d的频率)的超声波(以下,称为参照超声波)对相同的检查对象9执行超声波探伤;及第四识别步骤s102(s102a~s102c),在上述的探伤步骤s3中检测出的反射源在上述的参照探伤步骤s101中未被检测出的情况下,识别为该反射源是软化组织t。在该参照探伤步骤s101中,也可以分别使用不满足上述的超声波条件c的频率范围内的多个频率来执行超声波探伤。另外,作为进行评价的反射源,也可以将透过软化组织t后的形状回波(底面回波等)作为对象。
102.在图10所示的实施方式中,在步骤s100中,判定在上述的探伤步骤s3中是否检测到反射源,在未检测到的情况下,直接结束流程。相反,在步骤s100中检测到了反射源的情况下,在步骤s101中,执行上述的参照探伤步骤s101。然后,执行上述的第四识别步骤s102。即,在步骤s102a中,判定使用参照超声波的超声波探伤的结果是否检测到与在探伤步骤s3中检测到的反射源相同的反射源。对于该判定的结果为未检测到的反射源,在步骤s102b中识别为例如缺陷h等。相反,对于在步骤s102a中检测到相同的反射源的情况,在步骤s102c中识别为软化组织t。
103.根据上述的结构,分别执行使用了满足超声波条件c的超声波和不满足超声波条件c的超声波的超声波探伤,在使用了满足超声波条件c的超声波的情况下能够检测出的反射源在使用了不满足超声波条件c的超声波的情况下无法被检测到的情况下,识别为反射源是软化组织t。这利用了形成能够检测的软化组织t的晶粒g的粒径与用于检查的超声波的波长(频率)有较强的相关性,即使利用不满足超声波条件c的超声波进行超声波探伤,也难以检测到软化组织t。由此,能够适当地检测存在于检查对象9内的软化组织t。
104.(4.基于软化组织t特有的散射波/衍射波的识别方法)
105.图11a是例示本发明的一个实施方式所涉及的反射源为软化组织t的情况下的回波信号的反射方向的图,不具有指向性。另外,图11b是例示本发明的一个实施方式所涉及的反射源为缺陷h的情况下的回波信号的反射方向的图,具有指向性。另外,图12是表示本发明的一个实施方式所涉及的判定步骤s4的图,表示基于回波信号有无指向性的判定流程。
106.如图11a所示,来自软化组织t的回波信号表示接近粒界散射的反射行为,产生无指向性的反射波。因此,如果忽略噪声电平,则回波信号电平的例如最大值与回波信号的测定位置pm无关,在任何测定位置pm都没有大的差别。例如图11a中,示出了在检查对象9中的多个的位置分别使用接收器2r来观测回波信号的样态(在后述的图11b中也相同),但在任意的测定位置pm观测到的回波信号电平的最大值大致类似。
107.与此相对,如图11b所示,来自缺陷的回波信号具有由在空隙面(异种界面)上的反射引起的指向性。因此,回波信号电平的例如最大值根据回波信号的测定位置pm不同而不同。例如在图11b中,回波信号电平的最大值根据反射波的指向性的影响,根据测定位置pm不同而不同。
108.因此,考虑基于根据反射源是软化组织t(有指向性)还是缺陷h(无指向性)而确定的回波信号的指向性的有无,来识别反射源是否是软化组织t。
109.因此,在几个实施方式中,如图12所示,上述的判定步骤s4具有:指向性判定步骤s121,判定来自通过探伤步骤s3中的超声波探伤而检测出的反射源的超声波的反射波有无指向性;及第五识别步骤s122,在该判定的结果为判定为有反射波的指向性的情况下,识别为反射源是软化组织。
110.更详细而言,在本实施方式中,作为探伤器2,也可以使用阵列探头,使用全矩阵捕获(fmc)、总聚焦方法(tfm)等开口合成法。或者,也可以如tofd法那样,将发送接收元件分割而配置两个以上的多个来进行超声波发送接收。根据发送振子和接收器的位置关系、发送接收时间、回波高度,评价从反射源反射的回波信号的传播指向性,能够得到反射源的反射、散射、衍射特性。另外,在仅根据回波高度来判别有无指向性的情况下,在将由位于互不相同的任意的位置的两个振子测量的两个回波高度分别设为el1、el2(el2<el1)的情况下,在el1/el2>判定阈值的情况下,也可以判别为该回波信号是缺陷来源。该判定阈值例如为2等比1大的值。
111.在图12所示的实施方式中,在步骤s120中,判定在上述的探伤步骤s3中是否检测到反射源,在未检测到的情况下,直接结束流程。相反,在步骤s120中检测到反射源的情况下,在步骤s121中执行上述的指向性判定步骤s121。例如,也可以基于通过在上述的探伤步骤s3中执行超声波探伤而得到的、在检查对象9的多个测定位置pm分别测定的多个信号数据sm,来判定有无上述指向性。然后,执行上述的第五识别步骤s122。即,在步骤s122a中,对于从反射源对反射波(回波信号)具有指向性的反射源,在步骤s122b中例如识别为缺陷h等。相反,在步骤s122a中,对于没有该指向性的反射源,在步骤s122c中识别为软化组织t。
112.根据上述的结构,求出超声波的反射波(回波信号)的指向性,在判断为没有指向性的情况下,识别为反射源是软化组织t。本发明者们发现,对软化组织t照射超声波的情况下的反射波不具有指向性(参照图11a),与此相对,对不同于软化组织t的缺陷h照射超声波的情况下的反射波具有指向性(参照图11b)。由此,能够根据反射波有无指向性来适当地检测存在于检查对象9内的软化组织t。
113.(5.利用了学习的识别方法)
114.例如如上述的1~4的识别方法那样,作为反射源是否是软化组织t的识别方法,可以考虑多个识别方法,但根据软化组织t的性状等,存在在判定中最有效的识别方法或阈值等参数的选定不容易等情况等、识别基准成为属人的可能性。因此,考虑利用机器学习等学习方法。根据基于该学习的识别方法,不仅能够实现摆脱了属人的判定的高可靠性的识别,而且即使是人无法识别的微小的信号,也能够用于评价。
115.因此,在几个实施方式中,上述的判定步骤s4也可以具有第六识别步骤,在该第六识别步骤中,根据对检查对象9的超声波探伤的执行结果,使用能够输出通过该超声波探伤检测出的反射源是否是软化组织t的识别结果的学习模型,识别该反射源是否是软化组织t。换言之,该学习模型在输入通过对检查对象9执行超声波探伤而得到的上述的信号数据sm或对象频率特性dt等的执行结果时,输出反射源是否是软化组织t的识别结果。另外,学习模型通过上述的识别可知在该检查对象9中是否存在软化组织t,因此也可以输出该判定
结果。
116.更详细而言,对存在软化组织t的多个金属部件或检查对象的样本以及存在缺陷h的上述的样本,执行例如上述的1~4的识别方法中的至少一个识别方法。该样本中也可以包含不存在软化组织t及缺陷h的样本。并且,通过学习(机器学习)与从各样本得到的识别方法对应的特征量、识别对象的反射源是软化组织t还是不是软化组织t(缺陷h)这样的识别结果的关系性,来制作学习模型。更具体而言,通过学习(机器学习)将关于各样本的特征量与识别结果建立关联的多个学习数据(教师数据)来制作学习模型。
117.另外,具体而言,上述的特征量为来自反射源的反射波的频率特性、根据该频率特性得到的对象峰值位置或其形状、剪切波的传播速度、探伤步骤s3及参照探伤步骤s101的各自的检测结果、回波信号(反射波)有无指向性等。这些特征量可以从测量数据提取,但也可以通过频率特性的图像数据的图像处理来提取。
118.此外,在机器学习模型中,只要应用random forest(随机森林)、神经网络、逻辑回归、svm(support vector machine:支持向量机)等公知的方法即可,如果使用random forest,则也可以实施对识别有效的参数的选定。因此,能够期待有助于识别所需的数据取得方法(检查方法)的最优化、对软化组织t的识别有效的物理现象的阐明。即,能够使用机器学习来反馈并构筑最佳的检查方法。
119.根据上述的结构,基于多个样本,使用学习了通过超声波探伤得到的特征量与通过该超声波探伤检测到的反射源是否是软化组织t的识别结果的关系性的学习模型,根据对检查对象9执行超声波探伤的结果(特征量),识别在检查对象9内检测出的反射源是否是软化组织t。这样,通过利用学习(机器学习)方法,能够进行高可靠性的识别,能够适当地检测存在于检查对象9内的软化组织t。
120.但是,本发明并不限于本实施方式。也可以不使用机器学习模型,而组合映射上述的实施方式1~4的结果,使用品质工学方法(例如,mt法),识别上述的反射源是否是软化组织t(是软化组织t、还是缺陷h)。
121.本发明不限于上述的实施方式,还包括对上述的实施方式施加了变形的方式和将这些方式适当组合的方式。
122.(附记)
123.(1)本发明的至少一个实施方式所涉及的软化组织检测方法是用于通过超声波探伤来检测金属部件的检查对象(9)内的软化组织(t)的软化组织检测方法,
124.上述软化组织检测方法具备如下的步骤:
125.设定步骤(s1),设定形成上述软化组织(t)的晶粒(g)的假想粒径(d);
126.决定步骤(s2),以满足超声波条件(c)的方式决定设定频率(f),上述超声波条件(c)规定了上述假想粒径(d)与用于上述超声波探伤的超声波的频率即上述设定频率(f)之间的关系;
127.探伤步骤(s3),通过具有上述设定频率(f)的上述超声波,执行对于上述检查对象(9)的上述超声波探伤;及
128.判定步骤(s4),根据上述超声波探伤的执行结果,判定上述检查对象(9)内有无上述软化组织(t)。
129.根据上述(1)的结构,基于在金属部件的检查对象(9)内产生软化组织(t)的情况
下设想的形成软化组织(t)的晶粒(g)的粒径(假想粒径(d)),以满足超声波条件(c)的方式决定用于超声波探伤的超声波的频率(设定频率(f))。并且,通过使用决定的设定频率(f)的超声波探伤来测定检查对象(9),并基于其结果来判定有无软化组织(t)。由此,能够非破坏地检测存在于检查对象(9)内的软化组织(t)。
130.(2)在几个实施方式中,在上述(1)的机构中,
131.若将与上述设定频率(f)对应的上述超声波的波长设为λ,将上述假想粒径(d)设为d,则上述超声波条件(c)为λ≤2
×
d。
132.根据上述(2)的结构,与设定频率(f)对应的波长被决定为满足上述的关系式。由此,能够更可靠地检测存在于检查对象(9)内的软化组织(t)。
133.(3)在几个实施方式中,在上述(1)~(2)的机构中,
134.上述判定步骤(s4)具有如下的步骤:
135.对象分布取得步骤,取得上述超声波的反射波的频率特性即对象频率特性(dt);
136.第一解析步骤(s72),求出对象峰值位置(vp),上述对象峰值位置(vp)是上述对象频率特性(dt)中的存在峰值的频率的评价值;及
137.第一识别步骤(s73),取得上述对象频率特性(dt)的原因的反射源为缺陷(h)的情况下的上述评价值即参照峰值位置(vr),并且在上述对象峰值位置(vp)为具有比上述参照峰值位置(vr)大的值的第一阈值(la)以上的情况下,识别为上述反射源是上述软化组织(t)。
138.通过使用了上述设定频率(f)的超声波探伤,除了软化组织(t)(非空洞的组织)以外,还能够检测出裂纹、蠕变空隙(空洞)等缺陷(h)(内部缺陷)。并且,本发明者们通过深入研究发现,在反射了超声波的检查对象(9)内,根据反射源是否是软化组织(t),在超声波的反射波的频率特性上产生差异(参照图6)。具体而言,在存在软化组织(t)的情况下,与其不存在的情况相比,频率特性中的峰值(强度峰值)整体向高频率侧偏移。另外,透过软化组织(t)后的超声波的频率特性中的高频成分衰减,能够通过分析透过软化组织(t)后的形状回波来识别软化组织(t)的存在。
139.根据上述(3)的结构,计算超声波的反射波的频率特性的例如成为中心频率等的对象峰值位置(vp)。另外,根据在反射源不是软化组织(t)而是缺陷(h)的情况下可能得到的参照峰值位置(vr),确定与该对象峰值位置(vp)进行比较的第一阈值(la),在对象峰值位置(vp)为第一阈值(la)以上的情况下,识别为通过超声波探伤检测到的反射源是软化组织(t)。由此,能够适当地识别上述反射源是非空洞的软化组织(t)还是缺陷(h),能够适当地检测存在于检查对象(9)内的软化组织(t)。
140.(4)在几个实施方式中,在上述(1)~(3)的机构中,
141.上述判定步骤(s4)具有如下的步骤:
142.对象分布取得步骤,取得上述超声波的反射波的频率特性即对象频率特性(dt);
143.第二解析步骤(s82),进行上述对象频率特性(dt)的形状评价;及
144.第二识别步骤(s83),根据上述形状评价的结果,来识别成为上述对象频率特性(dt)的原因的反射源是否是上述软化组织(t)。
145.根据本发明者们发现的上述的见解,软化组织(t)通常由多个晶粒(g)构成,因此来自软化组织(t)的频率特性的形状为林状,存在多个峰值,与此相对,来自缺陷(h)的频率
特性的形状为山状,其峰值数大致为一个左右。
146.根据上述(4)的结构,评价对象频率特性(dt)的形状,并且根据该评价结果,来识别通过超声波探伤检测出的反射源是否是软化组织(t)。由此,基于对象频率特性(dt)的形状,能够适当地检测存在于检查对象(9)内的软化组织(t)。
147.(5)在几个实施方式中,在上述(1)~(4)的机构中,
148.上述判定步骤(s4)具有如下的步骤:
149.传播速度(v)取得步骤(s91),取得在通过上述超声波探伤检测出的上述超声波的反射源产生的剪切波的传播速度(v);及
150.第三识别步骤(s92),根据所取得的上述传播速度(v),来识别上述反射源是否是上述软化组织(t)。
151.软化组织(t)的机械性质与位于其周围的母材(金属组织)相比,硬度、弹性模量、密度等物性值不同,其结果是声阻抗不同。另外,在医疗领域中,通过在生物体组织内产生剪切波(弹性波)并测量该剪切波的传播速度(v)来测量生物体组织的硬度(杨氏模量)的方法已被实用化。因此,本发明者们考虑了通过对由超声波探伤检测出的超声波的反射源照射超声波脉冲而从反射源产生剪切波,并且根据该剪切波的传播速度(v)的测量结果来识别反射源是否是软化组织(t)。
152.具体而言,定性地说,若假定密度相同,则越是硬的组织,则传播速度(v)越快,越是柔缓的主旨,则传播速度(v)越慢,因此根据与从缺陷(h)产生的剪切波的测量速度的比较,进行上述的识别。或者,根据剪切波的传播速度(v)、密度、杨氏模量或刚性率的理论关系式,计算杨氏模量或刚性率或密度,根据其与母材或软化组织(t)的物性值的一致度,进行上述的识别。
153.根据上述(5)的结构,测量通过对由超声波探伤检测出的超声波的反射源照射超声波而产生的剪切波的传播速度(v),并且根据测量出的传播速度(v)来进行反射源是否是软化组织(t)的识别。由此,能够适当地检测存在于检查对象(9)内的软化组织(t)。
154.(6)在几个实施方式中,在上述(1)~(5)的机构中,
155.上述判定步骤(s4)具有如下的步骤:
156.参照探伤步骤(s101),在通过上述探伤步骤(s3)检测出上述超声波的反射源的情况下,通过具有不满足上述超声波条件(c)的频率的参照超声波,对上述检查对象(9)执行上述超声波探伤;及
157.第四识别步骤(s102),在上述参照探伤步骤(s101)中未检测出在上述探伤步骤(s3)中检测出的上述反射源的情况下,识别为上述反射源是上述软化组织(t)。
158.根据上述(6)的结构,分别执行使用了满足超声波条件(c)的超声波和不满足超声波条件(c)的超声波的超声波探伤,在使用了满足超声波条件(c)的超声波的情况下能够检测出的反射源在使用了不满足超声波条件(c)的超声波的情况下无法被检测到的情况下,识别为反射源是软化组织(t)。这利用了形成能够检测的软化组织(t)的晶粒(g)的粒径与用于检查的超声波的波长(频率)具有较强的相关性,即使通过不满足超声波条件(c)的超声波进行超声波探伤,软化组织(t)的检测也是困难的。由此,能够适当地检测存在于检查对象(9)内的软化组织(t)。
159.(7)在几个实施方式中,在上述(1)~(6)的机构中,
160.上述判定步骤(s4)具有如下的步骤:
161.指向性判定步骤(s121),判定来自通过上述超声波探伤检测出的反射源的上述超声波的反射波有无指向性;及
162.第五识别步骤(s122),在判定为上述反射波有指向性的情况下,识别为上述反射源是上述软化组织(t)。
163.根据上述(7)的结构,求出超声波的反射波(回波信号)的指向性,在判断为没有指向性的情况下,识别为反射源是软化组织(t)。本发明者们发现,对软化组织(t)照射超声波的情况下的反射波不具有指向性(参照图11a),与此相对,对与软化组织(t)不同的缺陷(h)照射超声波的情况下的反射波具有指向性(参照图11b)。由此,能够根据反射波有无指向性来适当地检测存在于检查对象(9)内的软化组织(t)。
164.(8)在几个实施方式中,在上述(1)~(7)的机构中,
165.上述判定步骤(s4)具有第六识别步骤,
166.在上述第六识别步骤中,使用学习模型来识别上述反射源是否是上述软化组织(t),上述学习模型能够根据对于上述检查对象(9)的上述超声波探伤的执行结果,输出通过上述超声波探伤检测出的反射源是否是上述软化组织(t)的识别结果。
167.根据上述(8)的结构,基于多个样本,使用学习了通过超声波探伤得到的特征量和通过该超声波探伤检测出的反射源是否是软化组织(t)的识别结果的关系性的学习模型,根据对检查对象(9)的超声波探伤的执行结果(特征量),来识别在检查对象(9)内检测出的反射源是否是软化组织(t)。这样,通过利用学习(机器学习)方法,能够进行高可靠性的识别,能够适当地检测存在于检查对象(9)内的软化组织(t)。
168.(9)在几个实施方式中,在上述(1)~(8)的机构中,
169.还包具备价步骤(s5),在该评价步骤(s5)中,计算评价指标,该积算指标包含检测出的上述软化组织(t)的尺寸及上述检查对象(9)内的位置中的至少一方。
170.根据上述(9)的结构,能够定量地评价所检测出的软化组织(t)。
171.(10)在几个实施方式中,在上述(1)~(9)的机构中,
172.上述超声波探伤的探伤器构成为从上述检查对象(9)的表面沿着上述检查对象(9)的深度方向照射上述超声波。
173.本发明者们通过深入研究发现,软化组织(t)存在从检查对象(9)的表面沿着深度方向形成为层状的情况,在该情况下,不是从探伤器倾斜地照射超声波,而是沿着深度方向照射超声波,由此能够提高检测精度。
174.根据上述(10)的结构,超声波探伤的探头沿着检查对象(9)的深度方向照射超声波。由此,即使在软化组织(t)沿着深度方向呈层状地产生的情况下,也能够高精度地检测软化组织(t)。
175.附图标记说明
176.1超声波探伤系统
177.12显示装置
178.2探伤器
179.2r接收器
180.2s发送器
181.3测定装置
182.4处理装置
183.9检查对象
184.s1设定步骤
185.s2决定步骤
186.s3探伤步骤
187.s4判定步骤
188.s5评价步骤
189.s71对象特性取得步骤
190.s72第一解析步骤
191.s73第一识别步骤
192.s81对象特性取得步骤
193.s82第二解析步骤
194.s83第二识别步骤
195.s91传播速度取得步骤
196.s91a剪切波生成步骤
197.s91b速度测量步骤
198.s92第三识别步骤
199.s101参照探伤步骤
200.s102第四识别步骤
201.s121指向性判定步骤
202.s122第五识别步骤
203.c超声波条件
204.f设定频率
205.g晶粒
206.d假想粒径
207.t软化组织
208.tm通常组织
209.h缺陷
210.dt对象频率特性
211.dr参照频率特性
212.vp对象峰值位置
213.vr参照峰值位置
214.la第一阈值
215.v传播速度
216.sm信号数据
217.pm测定位置
218.b聚焦波束
219.i音响图像。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1