轮椅以及轮椅的行走方法与流程
1.本发明涉及轮椅领域,尤其涉及一种轮椅以及轮椅的行走方法。
背景技术:
2.对于轮椅而言,使用者乘坐轮椅进行上坡行走的过程,如果坡度过大,则会面临后倾翻倒的风险。
3.为了避免事故的发生,使用者可以在上坡过程中尽量地向前倾,以避免后倾翻倒的风险,但如此会影响乘坐轮椅的用户体验。因此本领域需要一种轮椅以及轮椅的行走方法,提高轮椅行走过程中的安全性以及乘坐轮椅的用户体验。
技术实现要素:
4.本发明的目的是提供一种轮椅。
5.本发明的另一目的是提供一种轮椅的行走方法。
6.根据本发明一个方面的一种轮椅,包括:座位部;支承件,所述支承件可支承所述座位部,所述支承件与所述座位部可转动连接;轮体,与所述支承件连接,通过所述轮体与路面的相对滚动使得所述轮椅行走;其中,所述轮椅在行走过程具有第一状态与第二状态:在所述第一状态,所述座位部与所述路面的角度为第一角度;在所述第二状态,所述座位部与所述路面的角度为第二角度,所述第二角度大于所述第一角度。
7.在所述轮椅的一个或多个实施例中,所述支承件包括第一支承件、第二支承件,所述轮体包括第一轮体、第二轮体,所述第一支承件、第一轮体构成所述轮椅的前轮组件,所述第二支承件、第二轮体构成所述轮椅的后轮组件;其中,在所述第一状态,所述第一支承件与所述座位部的夹角为第三角度;在所述第二状态,所述第一支承件与所述座位部的夹角从所述第三角度转动至第四角度。
8.在所述轮椅的一个或多个实施例中,所述轮椅还包括第一驱动组件,包括第一活动件、第一连接臂以及第一驱动单元,所述第一连接臂分别连接所述第一支承件、第一活动件;所述第一驱动单元可驱动所述第一活动件活动,以带动所述第一连接臂活动,进而带动与所述第一连接臂连接的第一支承件与所述座位部的夹角从第三角度转动至所述第四角度。
9.在所述轮椅的一个或多个实施例中,在所述第一状态以及所述第二状态,所述第二支承件与所述座位部相对位置保持固定;在所述第一状态,所述第二支承件与所述路面的角度为第五角度,在第二状态,所述第二支承件与所述路面的角度为第六角度,所述第六角度大于所述第五角度。
10.在所述轮椅的一个或多个实施例中,所述座位部设置有第一导杆,所述第一导杆前后延伸地布置于所述座位部,所述第一活动件可前后活动地设置于所述第一导杆。
11.在所述轮椅的一个或多个实施例中,还包括踏板组件,包括踏板件以及踏板连接臂,所述踏板连接臂分别连接所述踏板件、所述第一支承件;在所述第一状态,所述踏板件
相对路面的高度为第一高度,在所述第二状态,所述踏板件相对路面的高度为第二高度,所述第二高度低于所述第一高度。
12.在所述轮椅的一个或多个实施例中,所述轮椅包括角度感测单元以及控制单元,所述角度感测单元可感测所述座位部与路面的角度,并输出感测信号至所述控制单元,所述控制单元可接受所述感测信号,判断所述感测信号对应的角度值与安全临界值的关系,并输出控制信号,所述控制信号控制所述轮椅由所述第一状态切换至所述第二状态。
13.在所述轮椅的一个或多个实施例中,所述轮椅还包括警示装置,所述控制单元还可以输出控制信号至所述警示装置,使所述警示装置发出警示。
14.根据本发明另一个方面的一种轮椅的行走方法,所述轮椅包括座位部、支承件以及轮体,所述所述支承件支承所述座位部,并且与所述座位部可转动连接,所述轮体与所述支承件连接,通过所述轮体与路面的相对滚动使得所述轮椅行走,所述行走方法包括:所述支承件与所述座位部被配置为:当所述轮椅行走于路面的一位置时,所述支承件与所述座位部之间的支承角度变化,所述座位部朝向所述路面转动。
15.在所述行走方法的一个或多个实施例中,所述位置的路面为具有上坡的路面。
16.本发明的有益效果包括但不限于,通过支承件与座位部可转动连接,轮椅在行走的行走过程具有第一状态以及第二状态的手段,通过支承件与座位部的转动实现座位部与所述路面的角度变化,实现第一状态与第二状态的切换,使得轮椅的座位部可以在行走过程通过自身的位置变化,实现在对轮椅行走过程的防后倾,提高轮椅行走过程的安全性,同时,由于轮椅的座位部可以在行走过程自身倾斜,使用者在使用过程中无需费力主动地挪动自己的身体前倾,而是被动地随着座位部的前倾即可,提升了用户体验。
17.另外,这种特性也可以成为一种能够使得使用者更方便坐入或离开轮椅的方式。使用者在座入轮椅或者离开轮椅时,轮椅从第一状态切换至第二状态,座位部的高度降低,同时脚踏板接触地面,使得使用者便于座入或者离开轮椅,提升了用户体验。
附图说明
18.本发明的上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变得更加明显,其中:
19.图1是一实施例的轮椅的结构示意图。
20.图2是一实施例的轮椅的一种第一状态的结构示意图。
21.图3是一实施例的轮椅的一种第二状态的结构示意图。
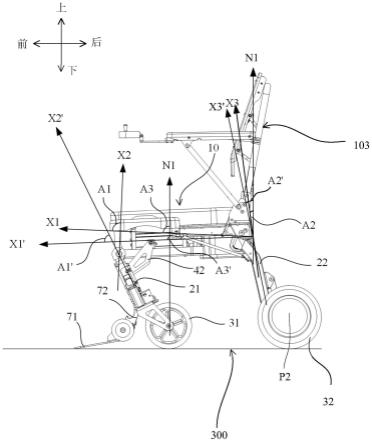
22.图4是一实施例的轮椅的另一种第一状态的结构示意图。
23.图5是一实施例的轮椅的另一种第二状态的结构示意图。
24.图6是一实施例的轮椅的局部分解结构示意图。
25.图7是一实施例的轮椅的一种控制方式的示意框图。
26.图8是一实施例的轮椅的另一种控制方式的示意框图。
具体实施方式
27.下面结合具体实施方式和附图对本发明作进一步说明,在以下的描述中阐述了更多的细节以便于充分理解本发明,但是本发明显然能够以多种不同于此描述的其它方式来
实施,本领域技术人员可以在不违背本发明内涵的情况下根据实际应用情况作类似推广、演绎,因此不应以此具体实施方式的内容限制本发明的保护范围。
28.另外,使用“一个实施例”、“一实施例”、和/或“一些实施例”意指与本技术至少一个实施例相关的某一特征、结构或特点。因此,应强调并注意的是,本说明书中在不同位置两次或多次提及的“一实施例”或“一个实施例”或“一个或多个实施例”并不一定是指同一实施例。此外,本技术的一个或多个实施例中的某些特征、结构或特点可以进行适当的组合。为了方便描述,文中可能使用诸如“下”、“上”、“前”、“后”、“左”、“右”等等的空间关系词语来描述附图中示出的一个元件或特征与其他元件或特征的关系。
29.下面将示例性地描述轮椅以及轮椅的行走方法。在图1至图5所示实施例的轮椅100为可折叠收纳以及展开的轮椅,但不以此为限,例如也可以是不可折叠收纳的轮椅。
30.如图1至图5所示的,在一实施例中,轮椅100包括座位部10、支承件20以及轮体30。座位部10用于供轮椅100的使用者乘坐使用,座位部10可以包括坐垫件101以及支承坐垫件101的座位支架102,如图1所示的,在一些实施例中,座位部10还可以包括靠背件103,以及扶手件104,以提升使用者的舒适度。支承件20用于支承座位部10,并且与座位部10可相对转动地连接。此处的连接,可以是直接连接,也可以是间接连接。轮体30与支承件20连接,通过轮体30与路面的相对滚动使得轮椅100行走。如图1所示的,轮体30包括的轮子的数量可以是四个,即轮椅为四轮轮椅,两个前轮,两个后轮,但不以此为限,例如也可以是一前一后的两轮,也可以是一前两后,或者两前一后的三轮等等,不以图中所示的为限。图示实施方式中,第一轮体31(前轮)对应的第一支承件21可转动地连接在座位部10的前连接位p1。参考图1以及图6所示的,第一支承件21与座位部10通过枢轴连接,使得第一支承件21可以该枢轴为轴线绕座位部10旋转。
31.参考图1,以及对比图2、图3所示的,在一实施例中,轮椅100的行走过程(此处省略画出了乘坐于轮椅的使用者),此处所述的行走过程,意为轮椅100承载使用者后的运行过程。第一状态的结构如图2所示,第二状态的结构如图3所示。图2、图3所示的实施例,为轮椅100在具有上坡坡度的路面200的行走过程,坡度角为a。
32.如图2所示的,当轮椅位于路面200的一位置时,在第一状态,轮椅100的座位部10与第一支承件21形成夹角,座位部10与第一支承件21的夹角a1,图示中约为90
°
,座位部10与第一支承件21的夹角为座位部10的延伸方向x1与第一支承件的延伸方向x2的夹角a1。此时路面200与座位部近似平行,定义座位部10与路面200之间的角度为座位部10的延伸方向x1与路面200的法线方向n1的夹角a3,此时座位部10与路面200为近似平行关系,座位部10与路面200的角度即夹角a3约为90
°
。
33.如图3所示的,当轮椅仍处于路面200的该位置,从第一状态切换至第二状态后,在第二状态,轮椅100的第一支承件21与座位部10发生绕p1的转动,,使得座位部10与第一支承件21之间的夹角a1从第一状态的x1与x2的夹角约为90
°
转动至第二状态的x1’与x2’的夹角a1’的小于90
°
,例如图3所示的70
°
左右,即a1’小于a1。虽然由于轮椅为折叠轮椅,座位部10与第二支承件22可转动地连接以便于折叠,但在第一状态与第二状态以及切换过程中,第二支承件22与座位部10两者的相对位置保持固定,可以理解为第二支承件22与座位部10在行走过程中近似于固定连接为一体。座位部10与第二支承件22之间的夹角不变,而是第二支承件22绕其与第二轮体32的连接位置p2转动,即第二支承件22与路面200的角度增大。
随着第一支承件21绕前连接位p1的相对转动,座位部10与路面200的角度从第一状态x1与n1的夹角a3转动至第二状态的x1’与n1的夹角a3’,从图3中可以看出,a3’大于a3。第二支承件22与路面200的角度,从图2所示的第一状态x3与n1的夹角a2转动至第二状态的x3’与n1的夹角a2’,从图3可以看出,a2’大于a2。继续参考图3所示的,可以理解到,座位部10的转动,将带动乘坐在座位部10的使用者发生前倾,如此实现对轮椅行走过程的防后倾。可以理解到,以上实施例的有益效果在于,通过支承件与座位部可转动连接,轮椅在行走的行走过程具有第一状态以及第二状态的手段,通过支承件与座位部的转动实现座位部与所述路面的角度变化,实现第一状态与第二状态的切换,使得轮椅的座位部可以在行走过程通过自身的转动,实现对轮椅行走过程的防后倾,提高轮椅行走过程的安全性,同时,由于轮椅的座位部可以在行走过程自身倾斜,使用者在使用过程中无需费力主动地挪动自己的身体前倾,而是被动地随着座位部的倾斜即可前倾,提升了用户体验。
34.另外,采用以上实施例介绍的方法的有益效果还可以是,可以使得轮椅100的结构紧凑,易于收纳折叠。采用以上实施例的方案,其有益效果还可以是可以使得轮椅100的轴距较短,无需轮椅为长轴距的结构也可以防止后倾。另外,也可以无需配置具有防后倾的小轮,如可以既简化了轮椅的架构,也让使用者无需进行弯腰或者蹲下操作折叠防后倾小轮的操作,提升了使用体验。可以理解到,图1至图5所示的轮椅100为短轴距轮椅,以及无防后倾小轮,是一种易于收纳折叠,结构紧凑的优选的实施例,并不限定轮椅100必须是短轴距以及无防后倾小轮。
35.以上实施例介绍的方案中,轮椅100为可折叠收纳的轮椅,第一支承件21、绕与座位部10的前连接位p1转动,座位部10与第二支承件22保持相对固定,而第二支承件22绕其与第二轮体32的连接位p2发生相对的转动。如此可以使得从第一状态切换至第二状态的过程中轮椅100较为稳定,防止发生翻倒的情况,提高轮椅的安全性。
36.图2、图3所示的实施例,为轮椅100在具有上坡坡度的路面200的行走过程。可以理解到,并非只在上坡的行走过程中才会发生第一状态与第二状态的切换。如图4、图5所示的,在另外一些实施例中,在平地的路面行走的轮椅100,也可以具有第一状态与第二状态。
37.图4、图5所示的实施例,为轮椅100在平地的路面300的行走过程。
38.如图4所示的,当轮椅位于路面300的一位置时,在第一状态,轮椅100的座位部10与第一支承件21近似为垂直关系,即座位部10与第一支承件21的夹角a1约为90
°
,定义座位部10与路面200之间的角度为座位部10的延伸方向x1与路面300的法线方向n1的夹角a3,即座位部10与图中向上方向的夹角,此时座位部10与路面300的角度即夹角a3为小于90
°
,座位部10可以带动其承载的轮椅使用者向后仰靠在靠背件103,以提升轮椅使用者的舒适感。
39.如图5所示的,当轮椅仍处于路面300的该位置,从第一状态切换至第二状态后,在第二状态,轮椅100的座位部10与第一支承件21发生相对转动,使得座位部10与第一支承件21之间的夹角从第一状态的a1转动至第二状态的a1’,例如图5所示,a1’小于a1,在第一状态与第二状态以及切换过程中,第二支承件22与座位部10两者的相对位置保持固定,座位部10与第二支承件22之间的夹角不变,第二支承件22绕其与第二轮体32的连接位置p2转动,即第二支承件22与路面300的角度增大,第二支承件22与路面300的角度,从图4所示的第一状态x3与n1的夹角a2转动至图5所示的第二状态的x3’与n1的夹角a2’,从图5可以看出,a2’大于a2。如此使得座位部10与路面300的角度从第一状态的a3转动至第二状态的
a3’,如图5所示的,a3’大于a3。如此可以实现的有益效果在于,可以在行走过程的开始阶段或结束阶段便于使用者的乘坐或者离开轮椅100。例如,图4所示的状态为轮椅100的行走过程的开始阶段,轮椅100从图4所示的第一状态切换至图5所示的第二状态,座位部10与路面300的角度从第一状态的a3转动至第二状态的比a3更大的a3’,使得座位部10的前段部分相对于路面300的高度降低,此时使用者可以更为轻松地坐上轮椅100的座位部10。再例如,图4所示的状态为轮椅100的行走过程的结束阶段,座位部10与路面300的角度从第一状态的a3转动至第二状态的比a3更大的a3’,从而使得座位部10的前段部分相对于路面300的高度降低,乘坐在座位部10的使用者离地面更近,此时使用者可以更为轻松地从轮椅100的座位部10离开。
40.承上所述的,以上实施例介绍的轮椅100,通过支承件与座位部可转动连接,轮椅在行走的行走过程具有第一状态以及第二状态的手段,通过支承件与座位部的转动实现座位部与所述路面的角度变化,实现第一状态与第二状态的切换,使得轮椅的座位部可以在行走过程通过自身的转动,其效果不限于在轮椅100在具有上坡坡度的路面200的行走过程实现对轮椅行走过程的防后倾,提高轮椅行走过程的安全性以及提升用户体验;其效果还可以使得轮椅100在平地的路面300的行走过程的开始阶段以及结束阶段方便使用者坐上或者离开轮椅100,也提升了轮椅使用的便利性。
41.参考图1至图6所示的,在一些实施例中,轮椅100还可以包括第一驱动组件40。参考图6所示的,第一驱动组件40包括第一活动件41、第一连接臂42以及第一驱动单元43,第一连接臂42分别连接第一支承件21、第一活动件41;第一驱动单元43可驱动第一活动件41活动,以带动第一连接臂活动42,进而带动与第一连接臂42连接的第一支承件21绕其与座位部10的前连接位p1转动。
42.第一活动件41可前后活动地设置于座位件10,此处的前后是以座位件10的延伸方向为参考的。第一活动件41可以沿着座位件10的延伸方向往复运动。〕第一连接臂42的两端分别铰接于第一活动件41与第一支承件21。第一活动件41前后活动,借此,第一支承件21如图2至图3所示的实施例,图4至图5所示的实施例,通过第一活动件41带动第一连接臂42而使得第一支承件21相对于座位部10转动,使得第一支承件21与座位部10的夹角从第一状态的90
°
转动至第二状态的小于90
°
。
43.第一驱动组件40还可以包括第一驱动单元43,用于驱动第一活动件41前后活动,借此,第一支承件21在第一连接臂42的带动作用下相对于座位部10可转动。图示实施方式中,第一驱动单元43例如可以是可以输出旋转运动的旋转驱动源(例如,旋转电机),该旋转驱动源可以通过丝杆传动机构驱动第一活动件41前后活动。该丝杆传动机构可以包括第一丝杆441和(例如,两根)第一滑杆442,第一活动件41可以与第一丝杆441螺纹连接,并且穿套于第一滑杆442,因而,第一驱动单元43的旋转驱动源输出旋转运动,带动第一丝杆441转动,第一活动件41可以在第一滑杆442的引导下前后滑动,这样,第一支承件21在第一连接臂42的带动作用下相对于座位部10转动。但不以此为限,例如第一驱动单元43也可以是直接输出直线运动的驱动源,例如往复运动的活塞液压缸。
44.参考图2至图5所示的,采用驱动组件的有益效果在于,可以使得轮椅100在第二状态的座位部10发生倾斜的结构足够稳定可靠,尤其是第一活动件41、第一连接臂42与第一支承件21三者的协同作用,使得第一支承件21发生与座位件10相对转动后,第一支承件21
由于座位件10以及使用者随着座位件10的倾斜而受力增大仍保持第一支承件21较大的支承强度,提升轮椅在第二状态下的结构的稳定性以及可靠性。
45.参考图1以及图6,图示实施方式中,座位部10还可以包括第一导杆61。第一导杆61可以认为是第一丝杆441和/或第一滑杆442。第一导杆61前后延伸且布置在座位部10在左右方向上的中间位置。第一活动件41可前后活动地设置于第一导杆61。这种布置有利于在第一导杆61的左右两侧腾出空间,以提供第一支承件21、相对于座位件10转动后的容置空间,使得轮椅100的空间利用率高。
46.参考图1至图6,在一些实施例中,轮椅100还可以包括踏板组件70,包括踏板件71以及踏板连接臂72,踏板连接臂72分别连接踏板件71、第一支承件21,踏板连接臂72与第一支承件21可活动地连接。在图中所示实施例中,踏板连接臂72的上端可以可转动地连接于第一支承件21,也即,踏板连接臂72可以相对于第一支承件21转动。踏板件71可以与踏板连接臂72的下端连接。图示实施方式中,踏板件71可以具有连接部711,并且可以通过连接部711可转动地连接至踏板连接臂72(的下端)。轮椅100中设置踏板组件70的有益效果在于,可以在行走过程中为使用者的腿部提供放置的位置。如图2至图3所示的实施例中,在第一状态,踏板件71相对路面的高度为第一高度,在所述第二状态,踏板件71相对路面的高度为第二高度,所述第二高度低于所述第一高度,适应座位体10转动后承载的轮椅使用者的腿部的放置位置随着使用者的前倾而降低,以提高使用者的舒适感。再如图4至图5所示的实施例中,在图4所示的第一状态,踏板件71相对于水平方向向上倾斜,使得行走过程的轮椅的使用者的腿部放置更为稳定以及舒适。在图5所示的第二状态,踏板件71借助与踏板连接臂72的可转动连接,以及踏板连接臂72与第一支承件21的可转动连接,使得踏板件71与路面300几乎重合,形成很小的坡度,这可以使用者直接踏上该踏板件71以坐上或者离开轮椅100,其原理在于,此时踏板件71受到路面300足够的支承,无需过多地承受使用者整个身体的体重,避免导致踏板件71损坏或者导致轮椅100整体地翻倒。另外,可以直接踏上踏板件71坐上或者离开轮椅的轮椅结构,让使用者可以无需在坐上轮椅前将踏板折叠而坐上之后再打开踏板,也可以无需在离开轮椅前就折叠踏板,或者若使用者不想进行折叠踏板的操作,则需要以较为别扭的姿态坐上或离开轮椅从而避免踩到踏板,因此以上实施例的轮椅结构让使用者直接踏上踏板件71坐上或者离开轮椅,极大地便利了使用者,进一步提升了使用者的用户体验。
47.参考图1至图3,以及图7所示的,轮椅100可以包括角度感测单元80以及控制单元90,对于在上坡的路面200行走过程的轮椅100而言,角度感测单元80可感测座位部10与路面200的角度,并输出角度信号至控制单元90。角度感测单元80的具体结构,可以是陀螺仪或角度传感器,可以直接感测路面200与座位部10的角度。也可以是间接的感测,例如检测第一活动件41或第一支承件21的运动位置,可以是通过位置传感器或是接近传感器。控制单元90可接受角度感测单元80输出的感测信号,判断角度信号对应的角度值与安全阈值的关系,并输出控制信号,若所述角度值大于安全临界值,则所述控制信号控制轮椅100由所述第一状态切换至所述第二状态。安全临界值可以通过前期的测试工作得到。例如测试得到,对于某个承载重量下对应轮椅对于坡度角为a的路面,若需要防止后倾,则座位部10与路面200的角度需要是大于b,那么b即为此时对应的安全临界值,若轮椅100与路面200的角度未达到安全临界值b,则控制单元90输出控制信号实现轮椅100从第一状态切换至第二状
态,直至座位部10与路面200的角度达到安全临界值。具体地实现达到安全临界值b的方法,例如可以是基于前述位置传感器检测到的运动位置,向第一驱动单元43传递控制信号,例如使之停止驱动、反向驱动或者变速驱动等等,使得第一支承件21与座位件10发生相对转动、以及第二支承件22与第二轮体32发生相对转动,座位件10与路面200的角度变大,达到安全临界值。
48.控制器包括一个或多个硬件处理器,诸如微控制器、微处理器、精简指令集计算机(risc)、专用集成电路(asic)、应用特定指令集成处理器(asip)、中央处理单元(cpu)、图形处理单元(gpu)、物理处理单元(ppu)、微控制器单元、数字信号处理器(dsp)、现场可编程门阵列(fpga)、高级risc机(arm)、可编程逻辑器件(pld)、能够执行一个或多个功能的任何电路或处理器等中的一种或多种的组合。控制单元90的具体位置,可以是安装于轮椅100,也可以是远程控制的结构,即控制单元90与轮椅100电连接即可,不限于控制单元90实体地安装于轮椅100。
49.另外,在一些实施例中,轮椅100还包括警示装置91,控制单元90还可以输出另一控制信号至警示装置91,例如座位部10与路面200的角度低于安全临界值时,另一控制信号可以控制警示装置91向使用者发出警示信号,例如发出较为尖锐的报警声响,或者警示灯亮起,以提示使用者目前存在上坡行走过程的后倾问题隐患。
50.参考图1、图4、图5以及图8所示的,不同于图7所介绍的类似于闭环控制的实施方式。图8所示的对应图4、图5的实施方式的控制方式,是一种类似于开环控制的实施方式。对于在平路的路面300行走过程的轮椅100而言,当使用者需要坐上轮椅或者离开轮椅时候,可以按下操作按钮81,输出操作信号,控制单元90接收操作信号后,向第一驱动单元43传递控制信号,例如使之停止驱动、反向驱动或者变速驱动等等,使得第一支承件21与座位件10发生相对转动、以及第二支承件22与第二轮体32发生相对转动,座位件10与路面300的角度变大,使得轮椅100从图4所示的第一状态切换至图5所示的第二状态。可以理解到,操作按钮81的具体结构,可以是实体的按钮,也可以是在显示面板上显示的操作按钮等形式。
51.可以理解到,轮椅100还可以包括电源模块,可以为控制单元以及第一驱动单元43提供电能以驱动电机,电源模块的形式可以是常见的可充电电池组,例如锂离子电池、镍氢电池等等,也可以是燃料电池、超级电容器等。
52.根据以上实施例的介绍,轮椅100的行走方法可以包括:支承件20与所述座位部10被配置为:当轮椅行走于路面的一位置时,支承件与座位部之间的角度变化,所述座位部朝向所述路面转动。例如图2、图3所示的,支承件20与座位部10被配置为当轮椅行走于具有上坡的路面200的一位置,第一支承件21绕其与座位部10的前连接位p1转动,使得支承件与座位部10之间的角度变化,座位部10朝向路面200的方向转动。
53.本发明虽然以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化及修饰,均落入本发明权利要求所界定的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1