具有抑制多普勒频移的光检测和测距系统的制作方法
1.本发明的目的是一种光检测和测距(lidar,light detection and ranging)系统,其使得能够减少或完全抑制由场景中的对象相对于lidar的移动引起的频移(这种效应称为多普勒频移)。
背景技术:
2.lidar装置通过用激光照射目标并用传感器测量反射光来创建到目标的距离图。激光特性(包括总往返时间、相位或波长)的差异可以用于制作目标的数字三维(3d)表示。
3.lidar通常用于制作高分辨率图,应用于大地测量学、地理信息学、考古学、地理学、地质学、地貌学、地震学、林业、大气物理学、激光制导、机载激光扫描制图(alsm,airborne laser swath mapping)和激光测高。该技术也用于一些自动驾驶汽车的控制和导航。
4.一些lidar利用了所谓的相干检测。在该检测方案中,在样本上反射的光与同反射光相干的本地振荡器混合。这种方法有几个优点,例如允许单光子灵敏度的光学增益,以及能够利用光的相位和波长的变化来测量距离。
5.使用这类lidar时出现的一个常见问题是场景中的对象相对于装置的移动引起的频移(这种效应称为多普勒频移)。相对于用于测量对象的相关特性的信号的带宽,这样的频移可能很大,并且可能使得这样的相关数据的提取变得复杂。如果对象的相对速度很大,如在车辆、飞机或卫星的情况下,这个问题就变得非常重要。
6.这种频移是可变的,通常是未知的,并且可以非常显著地扩展所检测的信号的带宽。在地面车辆情况下,相对速度可达300km/h及更高。该相对速度对应于54.0mhz的多普勒频移,照度为λ=1.55μm。这种可变频移使得依赖于对象信号的相干检测的系统的电子读出和信号处理链变得复杂。
7.即使信号链对于少数通道仍然是可管理的,它也增加了最终lidar系统的成本、大小和复杂度。此外,这也为具有大量输入的多通道相干lidar系统的实际实现方式提出了主要障碍。
8.为了解决这个问题,已经有几种方法,其中之一是使用非均匀采样或其他压缩感测方案来降低信号的总数据率。
9.总的来说,所有已开发的方法都有相同的缺点:复杂的电子读出电路和通用的信号处理链,这使得它们昂贵、尺寸大,并且通常对于具有大量通道的多通道结构难以实现和扩展。
技术实现要素:
10.本发明的lidar系统对象描述了利用一个或多个输入孔的相干lidar系统的修改,并且其实现简单。本发明的目的是减小或完全消除由场景中的对象相对于lidar的移动引起的频移(这种效应称为多普勒频移)。
11.在本发明中,减小或消除频移是通过以下方式完成的:测量参考通道中的多普勒频移信号,然后利用时域中信号混合的数学性质,移动一个或多个成像信道的频率以消除或减小所述多普勒频移。
12.具体地,本发明的具有抑制多普勒频移的lidar系统包括至少一个光源,该光源被配置为发射瞄准外部对象的第一光。第一光在对象上被漫反射或镜面反射,然后在至少一个输入孔中被接收(因此是反射光)。
13.然后,反射光可以在位于至少一个输入孔之后的分离器中被分离,该分离器被配置为将反射光分离成参考通道和至少一个第一成像通道。
14.然后,所分离的反射光的一部分通过至少第一成像通道被引导到与第一成像通道相关联的第一成像光同相正交(iq,in-phase and quadrature)接收器。第一成像光iq接收器被配置为获得包括第一同相分量和第一正交分量的第一干扰信号。
15.另外,反射光的另一部分通过参考通道被引导到与参考通道相关联的参考光iq接收器中。参考光iq接收器被配置为获得包括参考同相分量和参考正交分量的参考干扰信号。
16.至少本地光学振荡器与第一成像光iq接收器和参考光iq接收器相关联,并被配置为与反射光时间相干。
17.最后,在一个实施例中,系统包括至少一个混合器。混合器连接至第一成像光iq接收器和参考光iq接收器,并被配置为获得具有更高频率的第一互调产物和具有其多普勒频移缩放或完全消除的相关第二互调产物。
18.上述系统是本发明的一个可能实施例。然而,系统可以包括参考孔和多个输入孔,或者与一个或多个输入孔相关联的参考通道和多个成像通道。系统还可以包括与所有光iq接收器相关联的单个本地光学振荡器,或与参考光iq接收器相关联的参考本地光学振荡器和与成像光iq接收器相关联的成像本地光学振荡器,或与参考光iq接收器相关联的参考本地光学振荡器,以及多个成像本地光学振荡器(每个成像本地光学振荡器与一个或多个成像光iq接收器相关联)。
19.系统还可以包括应用于成像本地光学振荡器的光学振幅和/或相位调制器,使得互调产物的生成直接发生在光检测器处,而不需要电子混合。
附图说明
20.为了补充所做的描述,并且为了帮助更好地理解本发明的特征,根据本发明的实际实施例的优选示例,附上一组附图作为所述说明书的组成部分,其中,使用说明性和非限制性的特征,表示了以下内容。
21.图1示出了本发明实施例中对对象进行成像的示例lidar系统。
22.图1a示出了本发明实施例中的输入孔、光iq接收器以及参考本地光学振荡器和成像本地光学振荡器的方案。
23.图1b示出了本发明实施例中的替代实现方式,其中,2x4多模干涉(mmi,multi-mode interference)用于光iq接收器。
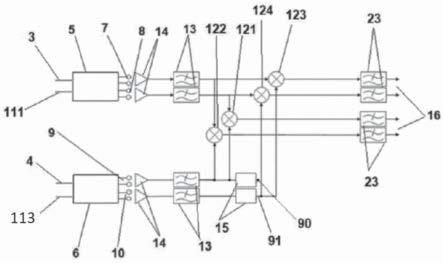
24.图2示出了本发明实施例中具有参考通道和成像通道的lidar系统的方案。
25.图3示出了本发明实施例中具有成像通道阵列和参考通道的lidar系统的方案,其
中,方向信息被编码在它们之间的相对相位中。
26.图4示出了本发明实施例中的lidar系统的方案,该方案具有多个输入孔和用于在光电检测器上直接混合参考信号的振幅调制器。
27.图5示出了吉尔伯特单元(gilbert cell)的两种方案,其中一种方案包括光电检测器以使能差分光电流的直接倍增。
28.图6示出了使用开关电容的吉尔伯特单元的集成方案。
具体实施方式
29.借助于图1至图6,对本发明的优选实施例进行描述如下。
30.本发明涉及一种lidar系统,例如图1所示的lidar系统(100)。lidar系统(100)包括至少一个光源(102),光源(102)被配置为发射瞄准外部对象(108)的光(110)。从对象(108)对光进行反射,以及反射光(112)由光接收单元(104)接收。更具体地,在本发明的第一实施例中,如参考后面的图更详细讨论的,在参考输入孔(103)处和成像输入孔(101)中接收光。光源(102)可以表示单个光源,或者具有不同波长的多个光源。在一些实施例中,光源(102)包括一个或多个激光源。
31.lidar系统(100)还包括处理器(106),被配置为从光接收单元(104)接收电信号,并使用所接收的电信号执行一个或多个处理。例如,处理器(106)可以使用所接收的电信号来重构包括对象(108)的3d图像。如上所述,在试图捕获反射光(112)时,对象(108)的移动(由向上的箭头标识)导致由对象(108)相对于lidar系统(100)的移动引起的频移,这种效应称为多普勒频移。
32.如图1a所示,参考输入孔(103)使得lidar系统(100)能够在来自对象(108)的反射光和参考振荡器(113)之间产生参考干扰信号。然后,该参考干扰信号用于调制来自对象的、由成像输入孔(101)收集的反射光(112)与成像振荡器(111)之间形成的干扰信号。
33.在任何给定的实现方式中,如在图1a的实施例中所示,参考输入孔(103)和成像输入孔(101)中的一个或多个成像输入孔(101)可以重叠,以及参考振荡器(113)和成像振荡器(111)也可以重叠。
34.根据一些实施例,参考振荡器(113)和成像振荡器(111)表现出与反射光(112)的某种程度的时间相干性,使得可以在电频率下对所形成的干扰信号进行处理。
35.在一个示例中,如图1a所示,系统包括单个输入孔(101,103)。在这种情况下,系统包括光源(102),光源(102)发射瞄准对象(108)的光。光从对象反射出去,通过输入孔(101,103)进入系统的反射光(112)被分离元件(2)分成第一成像通道(3)和参考通道(4),分离元件(2)可以是1
×
2的分离器。
36.根据一些实施例,至少两个通道(例如,参考通道(4)和第一成像通道(3))以基本相同的方式通过多普勒频移受到对象移动的影响,而非多普勒信息承载调制在它们之间保持不同。这使得两个通道上的信号能够以消除或大大减小多普勒频移、同时恢复信息承载调制的方式进行结合。
37.如图1a所示,第一成像通道(3)被馈送到第一成像光iq接收器(5),以及参考通道(4)被馈送到参考光iq接收器(6)。第一成像光iq接收器(5)与成像振荡器(111)相关联,以及参考光iq接收器(6)与参考振荡器(113)相关联。根据一些实施例,在光iq接收器(5,6)
内,两个振荡器(111,113)通过90
°
混合器馈送,该混合器生成每个通道的同相分量(7,9)和正交分量(8,10)之间的相移。
38.在其它实施例中,iq接收器(5,6)通过2x4 mmi耦合器来实现,mmi耦合器设计为提供4个输出(7,8,9,10)和两个输入(3,4)中的每个输入之间的相移。图1b中示出了一个实施例,其中,第一成像光iq接收器(5)是2x4 mmi耦合器,由第一成像通道(3)和成像振荡器(111)馈送,以及参考光iq接收器(6)是2x4 mmi耦合器,由参考通道(4)和参考振荡器(113)馈送。
39.在一个实施例中,成像振荡器(111)按照标准调频连续波(fmcw,frequently modulated continuous wave)方案进行波长扫描,以及参考振荡器(113)保持其波长不变。根据一些实施例,反射光(112)具有与振荡器(111,113)中的两个分量相干的分量。为此,要么照射来自两个分量的组合,要么两个分量与照射有共同的来源,保证相互相干。
40.根据一些实施例,第一成像光iq接收器(5)与第一成像通道(3)相关联,并被配置为获得包括第一同相分量(7)和第一正交分量(8)的第一干扰信号。参考光iq接收器(6)与参考通道(4)相关联,并被配置为获得包括参考同相分量(9)和参考正交分量(10)的参考干扰信号。
41.两个干扰信号都将以基本相同的方式受到多普勒的影响(在一些实施例中,由于波长不同而有小的差异)。然而,只有与成像振荡器(111)相关联的第一干扰信号在其干扰频率中携带关于对象(108)和lidar系统(100)之间距离的信息。
42.如图2所示,在至少一个混合器121-124(有时也统称为12)中将第一干扰信号和参考信号进行混合,生成两个互调产物。例如,混合产生可以丢弃的具有较高频率的第一互调产物,以及产生具有较低频率的输出互调产物(16)。该输出互调产物的多普勒频移被显著缩放,并且提供了将测距和幅度信息带到基带的可能性,从而最小化采样频率和电子读出复杂度。
43.为了说明,如本文所讨论的,针对该实现方式导出第一干扰信号和参考干扰信号。假设除了如果成像输入孔(101)是阵列的一部分的可能的相对相移外,成像输入孔(101)和参考孔(103)基本上处于相同位置。在用两个波长(具有相关联的波数和角频率,分别为k1,k2和ω1,ω2)和等振幅a的两个光源对场景进行同等照明的情况下,在离光源距离x处的光信号为:
[0044][0045]
其中,假设lidar系统的第一光源的第一波长经历具有常数k的线性频率调制。如果反射由第一光源发射的光的对象是单个漫反射器,则在距离xj处的对象在输入孔(101)的方向上具有强度反射率ρj以及在输入孔(101)与对象之间的方向上的相对速度vj,在输入孔(101)处收集的光的反射场是:
[0046][0047]
其中,如果存在孔阵列,则i为输入孔的索引。多普勒频移在公式中的2k1vj和2k2vj项中可见,修正反射光的频率。
[0048]
为了计算光iq接收器(5、6)中的干扰信号,为了简单起见,假定参考振荡器和成像振荡器(111、113)的两个波长分量具有统一的振幅:
[0049][0050][0051]
经过成像光iq接收器(5)和参考光iq接收器(6),第一干扰信号和参考干扰信号分别是:
[0052]
1.
[0053][0054]
2.
[0055][0056]
在这些中,光角频率的差异持续存在的拍频产物(beating product)一旦被检测到,对于电标准来说将是非常高的频率。例如,假设光源的光的两个波长在1.55μm的波长上相差0.1nm,则互调产物的频率为12.5ghz:
[0057]
[0058]
相反,本地振荡器和反射光频率相等的情况下,拍频产物被解调到较低的频率,该较低的频率是从所发射和所接收的相位调制频率之间的频率差加上或减去多普勒频移得出的。
[0059]
根据一些实施例,对于地面车辆的典型速度,多普勒频移将等于或低于100mhz,因此可以通过低通滤波器来抑制较高的混合项(包括光角频率差的混合项)。因此,如图2所示,第一组低通滤波器(13)可以与光iq接收器(5、6)相关联,以便对第一同相分量(7)、第一正交分量(8)、参考同相分量(9)和参考正交分量(10)进行滤波。
[0060]
干扰信号的低频分量提供为如下所示:
[0061]
3.
[0062]
4.
[0063]
深度和速度信息被编码在两个光电流的频率(和相位)中。通过只关注频率信息,观察到i1(t)和i2(t)的频率分别是:
[0064][0065][0066]
这两个频移的分量随线路速率的变化而不同地缩放。调制常数k直接影响经距离导出的频率。然而,多普勒频移仍然是独立的,并由场景性质确定。由于多普勒频移可以达到几十兆赫兹的频率,它通常使用快速采集电子设备,这可能会增加系统的成本。当涉及到用多个并行成像通道(3)放大场景检测时,这些视频频率也可能是个问题。
[0067]
然而,这两个频率的差为:
[0068][0069]
根据一些实施例,如果由两个光源发射的光的两个波长被选择为彼此接近(例如,在1.55μm的波长处相隔0.1nm),则多普勒频移的差异显著减小(对于50m/s的vj减小2khz)。
[0070]
然而,值得注意的是,两个波长可以相等。在这种情况下,可以完全抑制多普勒频移,而保留由于fmcw引起的频移。这种方法简化了光学系统和相关联的电-光电路。
[0071]
如果两个波长相等,则可以完全抑制多普勒频移,并将信号频率移到基带。在需要大量输入孔(101)的系统中,这种较低的多普勒频率使得能够显着降低线路速率、数据吞吐量和硬件复杂度。如果多普勒频率保持不变,那么应该从fmcw调制中消除多普勒频移,以便进行测量。实现这点的一个示例方法是随时间改变fmcw频率扫描中的k(例如,交替其符号),并比较两个调制斜率之间产生的电频移。
[0072]
减去从光iq接收器(5、6)获得的频率的一个示例方法是将其中一个电流与另一个电流的复共轭相乘。可以应用标准混频技术。这可以在数字或模拟域中并且潜在地基于如下所示的干扰信号来完成:
[0073][0074]
在一个实施例中,如图2所示,这可以使用连接到第一成像光iq(5)和参考光iq(6)输出或第一低通滤波器组(13)输出的一个或多个混合器121-124来实现。上述四个乘法项中的每一个乘法项包含具有频率差δf(低频)的第一互调产物和包括多普勒频率的和的第二互调产物。
[0075]
当四个相乘项组合时,与多普勒频率和有关的项被消除,仅有低频互调产物(其频率(按每δf)中包含深度信息)保留为输出互调产物(16)。
[0076]
根据一些实施例,使用第二组低通滤波器(23)滤除每个乘法项的高频分量,从而仅保留低频互调产物。这些低频互调产物在其频率(按每δf)中包含深度信息,作为输出互调产物(16)。根据一些实施例,使用一个或多个非线性放大器(25)放大输出互调产物(16)。
[0077]
在图2所示的实施例中,一个或多个混合器121-124包括第一混合器121以及第二混合器122,第一混合器121设计为混合第一正交分量(8)和参考同相分量(9),给出乘法项(i
1q
*i
2i
),以及第二混合器122设计为混合第一同相分量(7)和参考同相分量(9),给出乘法项(i
1i
*i
2i
)。
[0078]
在替代的解调技术中,人们可以处理干扰信号的各个分量,即第一同相分量(7)、第一正交分量(8)和参考干扰信号的导数,如时间求导模块(15)所提供的,该时间求导模块产生参考同相分量(90)的时间导数和参考正交分量(91)的时间导数,并适用于同时进行基带转换和解调的fm解调技术。
[0079]
这在成像振荡器和参考振荡器两者相同的实施例中特别有用,因为在这种情况下,如上所述的乘法项中的频率差δf=0,以及时间导数的使用使得能够将频率编码的深度信息提取到经时间求导的信号的幅度。
[0080]
例如,在成像振荡器和参考振荡器相同的这种情况下,可以在一个或多个混合器(121)-(124)中执行的操作是:
[0081][0082][0083]
类似于直接混频方法,在这种情况下,可以生成上述四个乘法项并将它们组合以仅保留dc分量,或者替代地,可以使用第二组低通滤波器(23)滤除每个乘法项的较高频率分量,并仅保留在其振幅中包含深度和多普勒信息的dc分量。
[0084]
为了分离多普勒和深度信息,可以随时间改变fmcw频率扫描中的k(例如,交替其符号),并比较两个调制斜率之间产生的dc分量。
[0085]
直接fm解调的缺点是对象的反射率(ρj)和频移被混合在这个dc值中。根据一些实施例,这可以通过单独解调振幅来解决:
[0086][0087]
或者,在成像振荡器和参考振荡器相同的情况下,也可以从(例如,由图2中的第一
混合器(121)和第二混合器(122)提供)时间导数之前的信号分量和参考分量之间的乘法项获得对象反射率。
[0088]
为了使用直接fm解调方法,图2示出了时间求导模块(15)和一个或多个混合器(121)-(124),该一个或多个混合器包括设计为混合第一同相分量(7)和经时间求导的参考正交分量(91)的第三混合器(123),以及设计为混合第一正交分量(8)和经时间求导的参考正交分量(91)的第四混合器(124)。因此,图2中的实施例提供了同时包括频率和幅度解调两者的解调方案。
[0089]
图3示出了一种实现方式,其中,多个成像通道(3)与从来自相同场景的反射光(112)获得的共同参考通道(4)相结合,但与单独的光源(一个不同波长的光源,但与从场景收集的至少一部分功率相干)混合。
[0090]
图3所示方案的优点是不同成像通道(3)在解调后保持电域中的相对相位差(包含在iq数据中)。这使得来自所述成像通道(3)的解调信号可以相干组合,以便恢复不同的方向。
[0091]
对于不同的混合器(在图3中统称为12),可以使用不同的构建方案。例如,混合器可以基于依赖于跨线性方案的电路在模拟域中实现。这些电路中的一个电路可以是吉尔伯特单元,图5中描述了一个示例。该电路的优点是可以在干扰信号的所有四个象限中工作。根据一些实施例,假定到单元的输入是差分的和基于电压的,来自上述光iq接收器(5、6)的光电流可以由跨阻放大器(14)放大到电压,以及如果合适,在模拟域中导出。
[0092]
为了简化gilbert单元,可以使用平衡差分对的光电流作为输入信号和电流偏置的源。这将减少中间跨阻放大器的需求,并使单元更易于复制以实现大规模集成。根据一些实施例,与不同的成像通道(3)混合的成像振荡器(111)可以从单个成像输入孔(101)生成,并作为电压信号分布在检测阵列(例如,成像通道)上,而没有重大的可扩展性问题。
[0093]
为了简化单元的读出,如图6所示,可以应用具有开关电容和多路复用视频输出的集成方案。这种开关电容的读出可以以与普通成像传感器相同的方式构造。例如,开关电容可以通过列来组织,以及使用多路复用方案将模拟值路由到适当的adc电路。
[0094]
最后,为了提供所需的混合功能,还可以对到每个成像通道的光学本地振荡器的振幅进行调制。如果做到这一点,光检测后不需要电子混合,这在系统复杂性方面提供了优势。根据一些实施例,光学调制器(17)用于调制光学本地振荡器的振幅,如图4所示。在一个实施例中,光调制器(17)是光振幅调制器,无论是基于电-光吸收、马赫-曾德尔干涉仪(mach-zehnder interferometer)还是其他。
[0095]
如果振幅调制留下一定程度的相位调制,则可以串联添加相位调制器,以确保恒定的相位操作,并避免参考信道中不希望出现的频率偏移。振幅调制也可以通过不同的方式获得,例如通过光放大器、激光电流调制等。
[0096]
在一些实施例中,第一同相分量(7)、第一正交分量(8)、参考同相分量(9)和参考正交分量(10)与信号的不同版本相乘,并相对于彼此移动90
°
,以便直接获得所需的数学结果。为了在物理上实现这一点,可以使用将单独调制的参考信号分配到每个输出混合器(12)。鉴于将应用于这两个通道的调制在电域中也是正交的,在一些实施例中,可以将它们一起加在调制信号中,如图4所示。
[0097]
根据一些实施例,第一同相分量(7)和第一正交分量(8)之间的产物或参考同相分
量(9)和参考正交分量(10)之间的产物产生可被滤除的高频互调产物。
[0098]
根据一些实施例,为了分离振幅和距离信息,应用于光学调制器(17)的调制信号可以在不同模式之间切换(具有或没有时间导数),使得能够交替恢复深度信息和/或信号振幅。这种时域复用可以适用于使用与解调信号的切换同步的积分器的实现方式,也可以用其他多路复用方案(频域复用、码复用等)来代替。可以使用开关(27)在成像通道和参考通道上切换解调信号。
[0099]
根据一些实施例,图4示出了上述两个实现方式选项的结合——对于单个波长的情况,通过光参考信号的振幅调制和振幅/频率解调的时间复用的多普勒频率解调。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1