用于光学装置的光学分辨率测量方法与流程
本揭示案的实施方式大体涉及光学装置。更特定地,本文中所述实施方式提供确定光学装置的调制传递函数(mtf)的方法。
背景技术:
1、一般认为虚拟现实是一种计算机生成的模拟环境,使用者在其中具有明显的物理存在性。虚拟现实体验能以3d形式生成并用头戴式显示器(hmd)观看,头戴式显示器诸如眼镜或其他具有近眼显示面板作为镜片的可穿戴显示装置,以显示替代实际环境的虚拟现实环境。
2、然而,增强现实实现的体验让使用者在其中仍能透视眼镜或其他hmd装置的显示镜片来观看周围环境,并也能看到被生成以用于显示且显现为环境的一部分的虚拟物体影像。增强现实能包括任何类型的输入,诸如音频和触觉输入,以及加强或增强使用者所体验的环境的虚拟影像、图形、及视频。作为新兴的技术,增强现实有着许多挑战及设计限制。
3、一个此类挑战是确定光学装置的光学分辨率,以确保符合影像质量标准。当前用于光学装置的测量系统一般具有跨大视野的低取样率及低产出量,且无法适当地补偿由测量系统内的摄影机和影像投射器导致的影像质量中的缺陷。额外地,测量系统可能体积庞大且易受与测量系统的影像投射器相关联的缺陷的影响。因此,希望具有用于光学分辨率测量的系统及方法,其将不被与影像投射器或摄影机相关联的缺陷影响,并将具有提高的产出量。据此,本领域中需要的是一种确定光学装置的mtf的方法。
技术实现思路
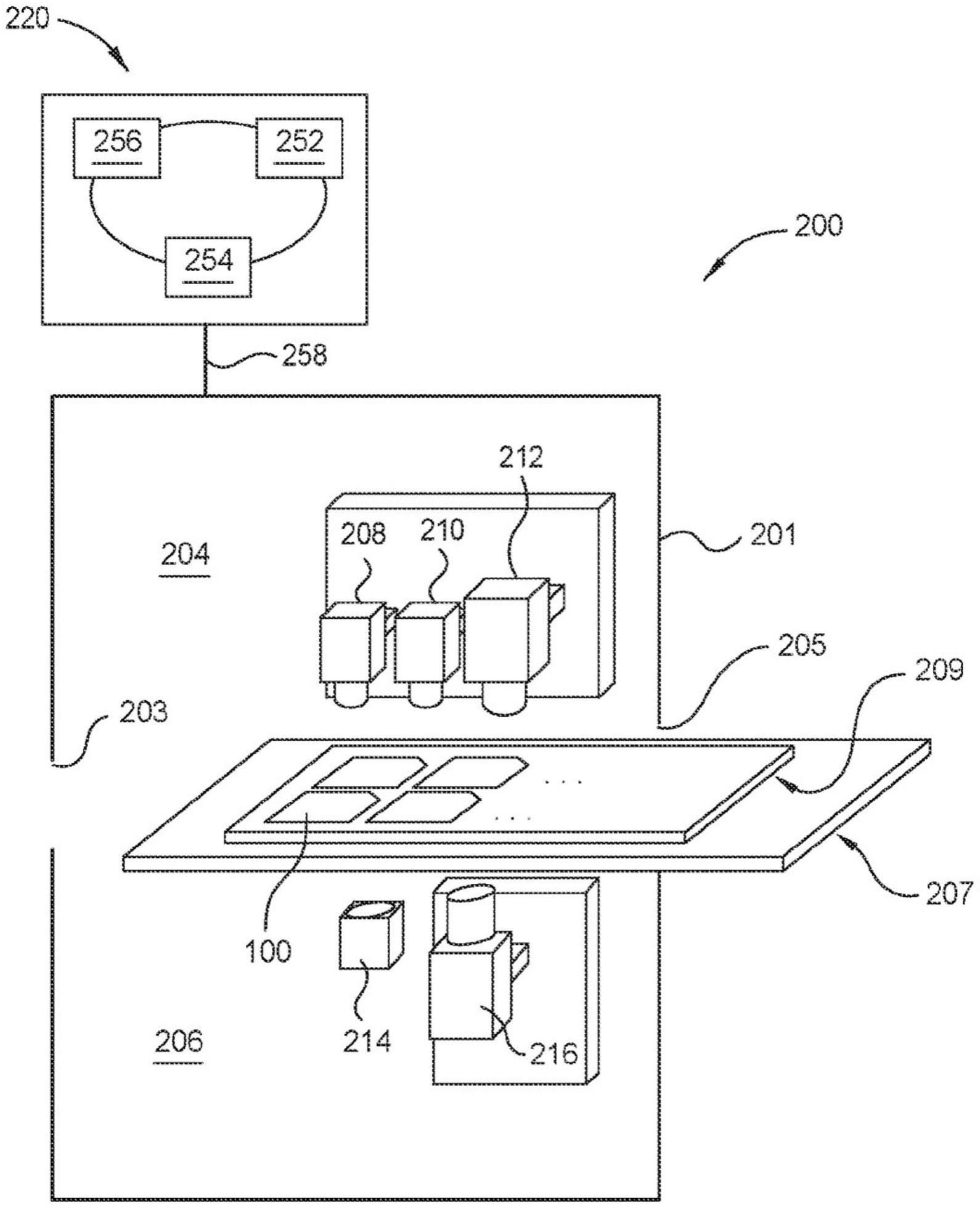
1、在一实施方式中,提供了一种方法。该方法包括投射图案的基线影像。该基线影像投射自测量系统的光引擎。该测量系统包括设置在该光引擎下方的载物台。该载物台可操作以在其上设置有一或更多光学装置。设置在该载物台上方的该光引擎将该基线影像投射至该一或更多光学装置。该测量系统进一步包括被定向为面向该载物台的检测器。该方法进一步包括捕捉该基线影像。该基线影像由该检测器捕捉。该方法进一步包括分析该基线影像以定位该基线影像上的第一多个点。该第一多个点被转换成基线函数。该方法进一步包括取得该基线函数的基线快速傅里叶变换(fft)以及将该一或更多光学装置设置在该载物台上。该方法进一步包括从该光引擎将该图案的影像投射至该一或更多光学装置及捕捉该影像。该影像由该检测器捕捉。该方法进一步包括分析该影像以定位该影像上的第二多个点。该第二多个点被转换成函数。该方法进一步包括取得对应于该影像的函数fft,以及通过将该基线fft与对应于该影像的该函数fft做比较来确定该一或更多光学装置的光学装置调制传递函数(mtf)。
2、在另一实施方式中,提供一种方法。该方法包括投射图案的基线影像。该基线影像投射自测量系统的光引擎。该测量系统包括设置在该光引擎下方的载物台。该载物台可操作以在其上设置有一或更多光学装置。设置在该载物台上方的该光引擎将该基线影像投射至该一或更多光学装置。该测量系统进一步包括被定向为面向该载物台的检测器。该方法进一步包括取得对应于该基线影像的基线快速傅里叶变换(fft)以及将该图案的影像投射至该一或更多光学装置。该影像从该光引擎投射至该一或更多光学装置。该方法进一步包括捕捉该影像。该影像由该检测器捕捉。该方法进一步包括取得对应于该影像的函数fft,以及通过将该基线fft与对应于该影像的该函数fft做比较来确定该一或更多光学装置的光学装置调制传递函数(mtf)。
3、在又另一实施方式中,提供一种方法。该方法包括从光引擎将图案的基线影像投射至测量系统的检测器。该方法进一步包括由该检测器捕捉该基线影像并分析该基线影像,以确定基线快速傅里叶变换(fft)。该方法进一步包括从该光引擎将该图案的影像投射至一或更多光学装置。该影像通过该一或更多光学装置被投射至该检测器。该方法进一步包括由该检测器捕捉该影像及分析该影像。该方法进一步包括确定该一或更多光学装置的光学装置调制传递函数(mtf)。
技术特征:
1.一种方法,包含:
2.如权利要求1所述的方法,进一步包含在捕捉所述基线影像时调整所述基线影像的曝光时间。
3.如权利要求1所述的方法,进一步包含在捕捉所述影像时调整所述影像的曝光时间。
4.如权利要求1所述的方法,其中所述基线函数和所述函数是点扩散函数、线扩散函数、或边缘扩散函数中的一者。
5.如权利要求1所述的方法,其中确定所述光学装置mtf的步骤包括将对应于所述影像的所述函数fft除以所述基线fft。
6.如权利要求1所述的方法,进一步包含由反射检测器捕捉所述影像,所述反射检测器被定向为面向所述载物台。
7.如权利要求1所述的方法,其中所述光引擎是高分辨率影像投射器,所述高分辨率影像投射器具有约10度至约120度的视场(fov)。
8.如权利要求1所述的方法,其中所述第一多个点的各者及所述第二多个点的各者中的一或更多者表示棋盘图案中相邻四边形的边缘。
9.一种方法,包含:
10.如权利要求9所述的方法,进一步包含在捕捉所述基线影像时调整所述基线影像的曝光时间。
11.如权利要求9所述的方法,其中所述光引擎是高分辨率影像投射器,所述高分辨率影像投射器具有约10度至约120度的视场(fov)。
12.如权利要求9所述的方法,其中所述第一多个点的各者及所述第二多个点的各者中的一或更多者表示棋盘图案中相邻四边形的边缘。
13.如权利要求9所述的方法,进一步包含由反射检测器捕捉所述影像,
14.如权利要求9所述的方法,其中确定所述一或更多光学装置的所述光学装置mtf的步骤包括将对应于所述影像的所述函数fft除以所述基线fft。
15.一种方法,包含:
16.如权利要求15所述的方法,其中分析所述基线影像的步骤包含确定基线mtf,分析所述影像的步骤包含确定函数mtf,且确定所述一或更多光学装置的所述光学装置mtf的步骤包含将通过分析所述影像所确定的所述函数mtf除以所述基线mtf。
17.如权利要求15所述的方法,其中分析所述基线影像的步骤包确定基线快速傅里叶变换(fft),分析所述影像的步骤包含确定对应于所述影像的函数fft,且确定所述一或更多光学装置的所述光学装置mtf的步骤包括将通过分析所述影像所确定的所述函数fft除以所述基线fft。
18.如权利要求15所述的方法,进一步包含在捕捉所述基线影像时调整所述基线影像的曝光时间。
19.如权利要求15所述的方法,其中所述光引擎是高分辨率影像投射器,所述高分辨率影像投射器具有约10度至约120度的视场(fov)。
20.如权利要求15所述的方法,进一步包含载物台,所述载物台设置在所述光引擎下方,以及通过被定向为面向所述载物台的反射检测器来捕捉所述影像。
技术总结
本文中的实施方式提供一种确定光学装置调制传递函数(MTF)的方法。本文中所述方法包括从光引擎将图案的基线影像投射至检测器。该基线影像被分析以确定基线函数。该基线函数的基线快速傅里叶变换(FFT)或基线MTF被取得。该方法进一步包括从该光引擎将该图案的影像投射至一或更多光学装置。该图案从该一或更多光学装置出耦合至该检测器。该影像被分析以确定函数。对应于该影像取得函数FFT或函数MTF。通过将该基线FFT与通过分析该影像所确定的该函数FFT做比较、或是通过将该基线MTF与通过分析该影像所确定的该函数MTF做比较,来确定该一或更多光学装置的光学装置MTF。
技术研发人员:傅晋欣,孙阳阳,卢多维克·戈代
受保护的技术使用者:应用材料公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!