激光雷达车辆尺寸测量仪及其测量方法
1.本发明属于车辆测量技术领域,具体涉及激光雷达车辆尺寸测量仪及其测量方法。
背景技术:
2.碰撞导致汽车车身变形,汽车整体定位参数就会发生变化,影响其行驶性、稳定性、安全性等。只有对车身整体进行综合技术诊断,特别是对车辆尺寸的测量,对车身及构件的形状与位置偏差的检测,才能有的放矢加以矫正和修理。
3.现有车辆尺寸的测量方法包括目测法和测距法等。目测法是以人眼为测量工具,对车辆整体尺寸估测。而测距法则是以钢卷尺或专业测距尺为测量工具,直接获得定向位置点与点的距离来测量车辆的尺寸。目测法仅用初步估测,而测距法虽然可全方位测量,但人为手动测量误差大,并且耗费人力等。
4.因此,本发明提供了激光雷达车辆尺寸测量仪及其测量方法,以至少解决上述部分技术问题。
技术实现要素:
5.本发明要解决的技术问题是:提供激光雷达车辆尺寸测量仪及其测量方法,以至少解决上述部分技术问题。
6.为实现上述目的,本发明采用的技术方案如下:
7.激光雷达车辆尺寸测量仪,包括用于对车辆尺寸测量的测距雷达、与测距雷达相连接用于测量数据处理的微处理器、与微处理器相连接用于实际尺寸显示的液晶显示器、以及用于实时监测测距雷达是否处于水平的水平仪。
8.进一步地,测距雷达扫描角度范围为360
°
,角度分辨率为0.18
°
,测距雷达最大距离为30m,距离误差在
±
3cm。
9.进一步地,微处理器为stm32f407zgt6,主频最高为168mhz,测距雷达与微处理器的连接为rj-45网口信号传输,数据传输速度为7.36mbps。
10.进一步地,还包括有与测距雷达相连接的电源,电源为9~36vdc、25v和2a-3a的供电电池。
11.激光雷达车辆尺寸测量仪的测量方法,包括以下步骤:
12.步骤s1、测距雷达激光扫描被测车辆得到扫描数据;
13.步骤s2、测距雷达将扫描数据通过以太网传输至微处理器;
14.步骤s3、微处理器过滤无关数据并计算得到到被测车辆两边尺寸数据;
15.步骤s4、微处理器通过到被测车辆两边尺寸数据由三角余弦公式计算被测车辆的测量数据。
16.进一步地,测距雷达需对车辆长、宽和高分别进行扫描,并且在长、宽和高扫描时,测距雷达均要正对着车辆的中间部位。
17.进一步地,扫描车辆尺寸长时,需要在距离车辆的4-6m范围内,扫描的长度结果为测距雷达实际扫描的边的长度,扫描车辆的最长长度,需测距雷达扫描到车辆的最长边;
18.扫描车辆尺寸宽时,需要在距离车辆的3-4m范围内,扫描的宽度结果为测距雷达实际扫描的边的宽度,扫描车辆的最宽长度,需测距雷达扫描到车辆的最宽边,并且扫描小轿车的宽时,需测量小轿车的后面宽边;
19.扫描车辆尺寸高时,需要在距离车辆的3-4m范围内,扫描的高度结果为测距雷达实际扫描的边的高度,在扫描高时需要将测距雷达反转90
°
。
20.进一步地,在所述步骤s1中,扫描数据包括测距雷达激光扫描分别到被测车辆左右两边临界点的距离a和b、到左界边开始的角度θ1、以及到右界边结束的角度θ2。
21.进一步地,在所述步骤s4中,由三角余弦公式√(a2+b
2-2abcos(θ
2-θ1))计算得到测量数据,即扫描车辆的测量值。
22.进一步地,在所述步骤s3中,过滤无关数据采用算法过滤,包括分离目标和背景、以及因光线、反射角度和无反射数据的过滤。
23.进一步地,测量方法还包括补充自动匹配误差补偿,采用了图像匹配,通过大量测试数据,得到不同车型、不同位置所给的盲点角度储存至微处理器形成车型库,车型库包括车型、补偿车型、以及补偿车型所对应的补偿值;由测距雷达对被测车辆的激光轮廓扫描,从车型库中匹配不同车型并判断是否为补偿车型,若为补偿车型,则测量数据加上所对应从补偿数据则为扫描车辆的最终测量值。
24.与现有技术相比,本发明具有以下有益效果:
25.本发明结构简单、设计科学合理、使用方便,解决了现有车辆尺寸的人为手动测量误差大、耗费人力等技术问题,采用了测距雷达实现自动且精准的车辆尺寸测量。
26.本发明包括测距雷达、微处理器、液晶显示器和水平仪。其中测距雷达通过其发出的激光射线得到测距雷达到车辆左右两边的距离数据,并将距离数据传输至微处理器内处理得到两边距离的夹角,并通过三角余弦公式计算出车辆的实际尺寸。各实际尺寸会最终显示在液晶显示器,便于快捷查看。本发明可全面取代传统的人工手动测量,具有测量自动化、测量速率快、测量精度高等优点。
附图说明
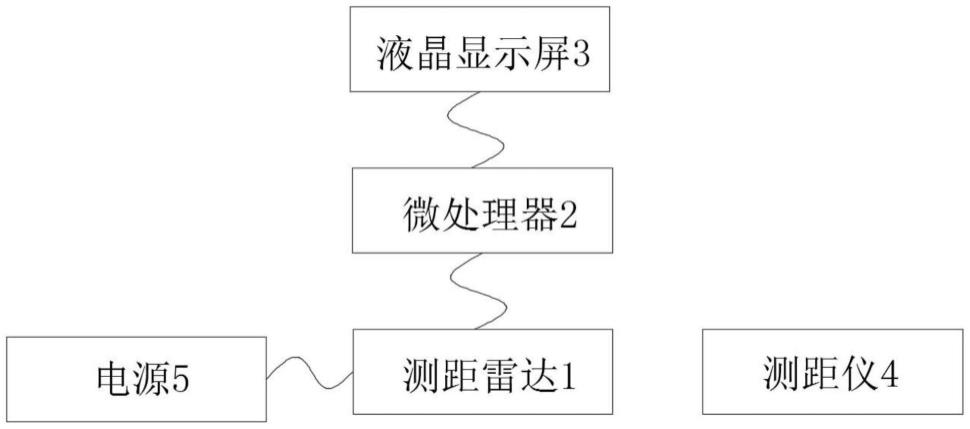
27.图1为本发明结构示意图。
28.图2为本发明过滤无关数据算法一。
29.图3为本发明过滤无关数据算法二。
30.其中,附图标记对应的名称为:
31.1-测距雷达,2-微处理器,3-液晶显示器,4-水平仪,5-电源。
具体实施方式
32.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进一步详细说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此其不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
34.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;当然的,还可以是机械连接,也可以是电连接;另外的,还可以是直接相连,也可以是通过中间媒介间接相连,或者可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
35.如图1-3所示,本发明提供的激光雷达车辆尺寸测量仪,结构简单、设计科学合理、使用方便,解决了现有车辆尺寸的人为手动测量误差大、耗费人力等技术问题,采用了测距雷达实现自动且精准的车辆尺寸测量。
36.本发明包括用于对车辆尺寸测量的测距雷达1、与测距雷达1相连接用于测量数据处理的微处理器2、与微处理器2相连接用于实际尺寸显示的液晶显示器3、以及用于实时监测测距雷达1是否处于水平的水平仪4。测距雷达1通过其发出的激光射线得到测距雷达1到车辆左右两边的距离数据,并将距离数据传输至微处理器2内处理得到两边距离的夹角,并通过三角余弦公式计算出车辆的实际尺寸,各实际尺寸会最终显示在液晶显示3,便于快捷查看。本发明可全面取代传统的人工手动测量,具有测量自动化、测量速率快、测量精度高等优点。
37.本发明测距雷达1扫描角度范围为360
°
,角度分辨率为0.18
°
。测距雷达1优选镭神激光有限公司的n301产品激光雷达,可在0.1s完成一次360
°
的扫描,也就是每0.1s都会有2000个距离数据返回给微处理器2,只需要读取测距雷达1正前方的距离数据进行解析,因为正前方的距离数据为目标的数据。测距雷达1最大距离为30m,距离误差在
±
3cm。n301产品激光雷达的反射率范围可以覆盖5%~400%,通过同时测量3个高反射率定位板的位置进行解算,定位精度能够达到毫米级。测距雷达1最大距离实际会受到强光和被测车辆材质的影响变小。
38.本发明测距雷达1采用tof测距原理,通过测距雷达1调制激光的发射、返回时间差来测量扫描车辆与测距雷达1的相对距离。测距雷达1的激光发射器发出调制脉冲激光,内部定时器开始从t1时刻计算时间,当激光照射到扫描车辆后,部分能量返回,当测距雷达1接收到返回的激光信号时,在t2时刻停止内部定时器计时,通过光速c计算得到扫描数据d:d=c*(t2-t1)/2。
39.本发明微处理器2为stm32f407zgt6,主频最高为168mhz,测距雷达1与微处理器2的连接为rj-45网口信号传输,数据传输速度为7.36mbps。
40.本发明还包括有与测距雷达1相连接的电源5,电源5为9~36vdc、25v和2a-3a的供电电池。上述电源5可为与测距雷达1稳定供电并保持测距雷达1稳定运行。
41.本发明激光雷达车辆尺寸测量仪的测量方法,包括以下步骤:
42.步骤s1、测距雷达激光扫描被测车辆得到扫描数据;
43.步骤s2、测距雷达将扫描数据通过以太网传输至微处理器;
44.步骤s3、微处理器过滤无关数据并计算得到到被测车辆两边尺寸数据;
45.步骤s4、微处理器通过到被测车辆两边尺寸数据由三角余弦公式计算被测车辆的测量数据。
46.本发明需对车辆长、宽和高分别进行测量,并且在长、宽和高测量时,测距雷达1均要正对着车辆的中间部位,这里不需要一定严格对准中间,测距雷达1大致对准车辆中间即可。
47.本发明扫描车辆尺寸长时,需要在距离车辆的4-6m范围内,扫描的长度结果为测距雷达1实际扫描的边的长度,扫描车辆的最长长度,需测距雷达1扫描到车辆的最长边,同时可采用激光辅助工具供使用者察看扫描的边。长度测量精度大部分控制在2%,最大误差不超过4%。
48.本发明扫描车辆尺寸宽时,需要在距离车辆的3-4m范围内,扫描的宽度结果为测距雷达1实际扫描的边的宽度,扫描车辆的最宽长度,需测距雷达1扫描到车辆的最宽边,并且测量小轿车的宽时,需测量小轿车的后面宽边。根据多次测量发现,小轿车的后面要比前面宽度要宽,所以一般测量小轿车的后面较为准确,同时可采用激光辅助工具供使用者察看扫描的边。长度测量精度在4%以内,因为小轿车的宽度很短,测距雷达1的系统误差为7cm,所以测量大车的宽度精度会更高一点。
49.本发明扫描车辆尺寸高时,需要在距离车辆的3-4m范围内,扫描的高度结果为测距雷达1实际扫描的边的高度,在测量高时需要将测距雷达1反转90
°
。测量高时需要水平仪4辅助查看测距雷达1是否水平。高度测量测量精度在4%以内,因为小轿车的高度很短,激光雷达的系统误差为7cm,测量大车的高度精度会更高一点。
50.本发明扫描数据包括测距雷达激光扫描分别到被测车辆左右两边临界点的距离a和b、到左界边开始的角度θ1、以及到右界边结束的角度θ2。由三角余弦公式√(a2+b
2-2abcos(θ
2-θ1))可计算得到测量数据,即扫描车辆的测量值。
51.由于上述扫描为连续扫描,会出现错误或不可以数据,为此需要对扫描数据进行筛选,过滤掉无关数据。过滤无关数据采用算法过滤,包括分离目标和背景、以及因光线、反射角度和无反射数据的过滤。
52.基于测距雷达的内部构造和激光扫描工作原理,在测距雷达扫描得到第一帧数据时,即可解算并获取测距雷达内部射线的方位角。在设备放置时将测距雷达正面对目标,保证解算过程从目标物体上进行,当扫描数据有巨大突变时,即识别目标与背景分离,采用图2所述的算法一过滤。
53.若扫描车辆为大型货车,如半挂等,车体本身就处于脱离状态,图2算法一会进行数据突变和脱离角度大小的同时辨识。例如,距离目标为4m,突然距离变成10m,同时每0.18
°
就会再次检测距离值与目标距离值做对比,经过0.18
×
4也就是经过四次检测,只要中间有一次距离与真实值偏差《1m,即视为物体内部分离,忽略本次数据异常突变,可以轻松排除由物体表面的不平整所带来的细小突变。
54.上述利用扫描数据具有返回值为0、以及巨大突变的算法可过滤异常数据,并跳过进行下一点数据的解算。但遇到连续多点出现异常数据,尤其是边界点,会造成起止点抓取偏差影响角度偏大或偏小,最终放大到目标上,造成巨大偏差,这时需将过滤掉的数据根据起止点是否处于该区间做二次判断,算法二如图3所示。若不在所设定的区间则无需处理,
如果在所设定的区间则进一步判断,并给予一定补偿值(因为这种判断会在0.18-0.54
°
之间,所以会折中取中间值)。
55.本发明采用三角余弦公式计算测量数据,需要考虑测量精度,为此左右两边临界点的抓取、中间异常点的处理尤为关键。例如,目标为规则物体,即不存在盲区,两边临界位置点存在一定的角度,可能不会得到反馈数据θ1或θ2;再例如,左右各取一个点,没有反馈数据,即有0.18
×
2=0.36的误差,利用上式计算可以得到误差为:0.025m=2.5cm(a,b取值为4m),亦或不止一两个点不反馈数据,还有非规则物体所带来的影响,为此处理数据上必须准确抓取到临界点。
56.除此之外,由于不规则物体存在盲区,为此需要自动匹配误差补偿。采用了图像匹配,通过大量测试数据,得到不同车型、不同位置所给的盲点角度储存至微处理器形成车型库,车型库包括车型、补偿车型、以及补偿车型所对应的补偿值;由测距雷达对被测车辆的激光轮廓扫描,从车型库中匹配不同车型并判断是否为补偿车型,若为补偿车型,则测量数据加上所对应从补偿数据则为扫描车辆的最终测量值。例如,上海大众轿车型补偿数据为-0.714*距离+6.08,其中距离单位是m,特别上述仅为车长的匹配公式,宽和高匹配公式则均不相同。
57.本发明所用n301产品激光雷达、stm32f407zgt6、液晶显示器3和水平仪4均为现有已知电气设备,并且均可在市场上直接购买使用,其结构、电路、以及控制原理均为现有已知技术,因此,关于n301产品激光雷达、stm32f407zgt6、液晶显示器3和水平仪4的结构、电路、以及控制原理在此不赘述。
58.最后应说明的是:以上各实施例仅仅为本发明的较优实施例用以说明本发明的技术方案,而非对其限制,当然更不是限制本发明的专利范围;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围;也就是说,但凡在本发明的主体设计思想和精神上作出的毫无实质意义的改动或润色,其所解决的技术问题仍然与本发明一致的,均应当包含在本发明的保护范围之内;另外,将本发明的技术方案直接或间接的运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1