一种探测场景三维信息的方法及雷达系统
1.本发明涉及光量子技术领域,尤其涉及一种探测场景三维信息的方法及雷达系统。
背景技术:
2.基于光子飞行时间(tof)测量的光子计数雷达可以获取环境的三维场景信息,是环境信息感知的重要手段。光子计数雷达技术经过多年发展,在物理实现方式,探测灵敏度和系统体积等方面已经逐渐遇到发展瓶颈,需要引入新的技术突破。
3.光子计数雷达中的光量子雷达采用处于特定光量子态的光子流照射环境,以获得环境的深度信息。理论分析表明利用光量子态蕴含的量子关联和量子纠缠特性,结合有效的量子测量方法可以极大的提升光子计数雷达的检测灵敏度。但是,尽管已经有一些利用光量子态提升雷达性能实验研究工作报道,但普遍处于原理论证阶段,距离实际应用尚有较大距离。
4.目前,光量子雷达在测距功能的基础上,需要配合机械扫描才能实现获得环境的深度信息。然而,机械扫描结构往往容易损坏,寿命较短,且扫描精度有限、速度有限,所以这种方法和目前光子计数雷达全固态化和芯片集成化的发展趋势并不相符,限制了该技术在诸多场景中的应用。
技术实现要素:
5.本发明提供一种探测场景三维信息的雷达系统及方法,用以解决现有技术中光量子雷达需要配合机械扫描才能实现探测场景三维信息的缺陷,实现无需机械光束扫描的光子计数雷达功能,并提高了探测灵敏度。
6.本发明还提供一种探测场景三维信息的雷达系统,包括:
7.量子光源模块,用于利用泵浦光脉冲生成频率关联的第一光子和第二光子,并得到所述泵浦光脉冲的输出时间;
8.第一光子发射接收模块,用于将所述第一光子经过空间色散发射到不同空间方向,获取所述第一光子中经待测场景反射并原路返回的第一光子被第一单光子探测器探测到的时间,以作为第一探测时间;
9.第二光子发射接收模块,用于将所述第二光子经过时间色散,获取经过时间色散后的所述第二光子被第二单光子探测器探测到的时间,以作为第二探测时间;
10.数据处理模块,用于根据所述输出时间、所述第一探测时间,以及所述第二探测时间,得到所述待测场景的三维图像。
11.根据本发明提供的探测场景三维信息的雷达系统,所述量子光源模块包括:泵浦光脉冲、非线性光学材料单元和频率分发单元;
12.所述泵浦光脉冲用于照射所述非线性光学材料单元;
13.所述非线性光学材料单元用于利用入射的所述泵浦光脉冲产生频率关联光子对;
14.所述频率分发单元用于将所述频率关联光子对分离成所述第一光子和第二光子。
15.根据本发明提供的探测场景三维信息的雷达系统,所述量子光源模块还包括:光电探测模块;
16.所述光电探测模块用于根据剩余泵浦光脉冲产生包含所述输出时间的电信号,并将所述电信号输入所述数据处理模块;
17.其中,所述剩余泵浦光脉冲为激励所述非线性光学材料生成频率关联光子对后,剩余的泵浦光脉冲。
18.根据本发明提供的探测场景三维信息的雷达系统,所述第一光子发射接收模块具体包括:光路调整单元、空间色散元件、扩束元件和第一单光子探测器;
19.所述光路调整单元用于将所述第一光子进行准直,以得到准直光,以及将由所述空间色散元件返回的第一光子输入所述第一单光子探测器;
20.所述空间色散元件用于使所述准直光按照波长的不同向不同空间方向传播,并将由所述扩束元件返回的第一光子返回所述光路调整单元;
21.所述扩束元件用于对向不同空间方向传播的第一光子进行扩束,并将扩束后因照射所述待测场景而反射回的第一光子进行会聚后,返回所述空间色散元件;
22.所述第一单光子探测器用于探测经待测场景反射并原路返回的第一光子,以得到所述第一探测时间。
23.根据本发明提供的探测场景三维信息的雷达系统,所述第二光子发射接收模块具体包括:时间色散元件和第二单光子探测器;
24.所述时间色散元件用于对所述第二光子进行时间色散;
25.所述第二单光子探测器用于探测经时间色散后的第二光子,以得到所述第二探测时间。
26.本发明还提供一种探测场景三维信息的方法,包括:
27.利用泵浦光脉冲生成频率关联的第一光子和第二光子,并得到所述泵浦光脉冲的输出时间;
28.将所述第一光子经过空间色散发射到不同空间方向,获取所述第一光子中经待测场景反射并原路返回的所述第一光子被第一单光子探测器探测到的时间,以作为第一探测时间;
29.将所述第二光子经过时间色散,获取经过时间色散后的所述第二光子被第二单光子探测器探测到的时间,以作为第二探测时间;
30.根据所述输出时间、所述第一探测时间,以及所述第二探测时间,得到所述待测场景的三维图像。
31.根据本发明提供的探测场景三维信息的方法,所述利用泵浦光脉冲生成频率关联的第一光子和第二光子,具体包括:
32.利用所述泵浦光脉冲激励非线性光学材料,生成频率关联光子对;
33.将所述频率关联光子对通过光学滤波,分离成所述第一光子和第二光子。
34.根据本发明提供的探测场景三维信息的方法,所述得到所述泵浦光脉冲的输出时间,具体包括:
35.将激励所述非线性光学材料生成频率关联光子对后,剩余的泵浦光脉冲经过光电
探测,得到包含所述输出时间的电信号;
36.由所述电信号得到所述输出时间。
37.根据本发明提供的探测场景三维信息的方法,所述根据所述输出时间、第一探测时间,以及第二探测时间,得到所述待测场景的三维图像,具体包括:
38.根据所述输出时间、所述第二探测时间和时间色散的色散量,得到所述第二光子的波长;
39.根据所述第二光子的波长和所述泵浦光脉冲的波长,得到所述第一光子的波长;
40.根据所述第一光子的波长得到所述待测场景相对于所述第一光子照射方向的角度信息;
41.根据所述第一光子的波长、所述输出时间和所述第一探测时间,得到所述待测场景的深度信息。
42.根据本发明提供的探测场景三维信息的方法,所述利用泵浦光脉冲生成频率关联的第一光子和第二光子,包括:
43.周期性的利用泵浦光脉冲生成频率关联的第一光子和第二光子;
44.在根据所述输出时间、第一探测时间,以及第二探测时间,得到所述待测场景的三维图像之后,所述探测场景三维信息的方法还包括:
45.将当前周期得到的所述待测场景的三维图像与至少一个历史周期得到的所述待测场景的三维图像进行融合。
46.本发明提供的一种探测场景三维信息的雷达系统及方法,一方面利用频率关联的第一光子和第二光子之间的量子关联筛选单光子探测数据,从而降低噪声计数事件的影响,提升了探测的灵敏度;另一方面,利用第一光子和第二光子之间的频率关联特性,实现了无需机械光束扫描的光子计数雷达功能。同时,由于摆脱了机械扫描的要求,使具有了利用芯片集成的量子光源和光量子芯片技术实现系统芯片集成的潜力,为光子计数雷达的小型化提供了可行方案。此外,照射空间的光强度仅在单光子水平,在工作时不易被目标发现,特别适合对系统隐蔽性要求高的应用场景。
附图说明
47.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
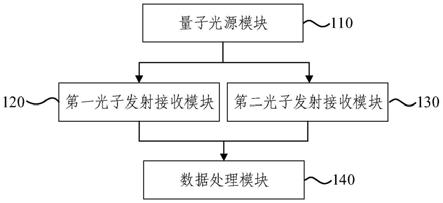
48.图1是本发明提供的一种探测场景三维信息的雷达系统的结构示意图;
49.图2是应用本发明提供的量子光源模块的工作原理图;
50.图3是本发明提供的第一光子发射接收模块的工作原理图;
51.图4是本发明提供的一个实例中待成像物体在空间内的分布图;
52.图5是本发明提供的图4所示实例中待成像物体的三维成像的测量结果;
53.图6是本发明提供的一种探测场景三维信息的方法的流程示意图。
具体实施方式
54.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.下面结合图1描述本发明的一种探测场景三维信息的雷达系统,如图1所示,所述雷达系统包括:量子光源模块110、第一光子发射接收模块120、第二光子发射接收模块130和数据处理模块140;其中,
56.量子光源模块110用于利用泵浦光脉冲生成频率关联的第一光子和第二光子,并得到所述泵浦光脉冲的输出时间。
57.需要说明的是,量子光源模块生成的频率关联的第一光子和第二光子的频率相对于泵浦光脉冲的频率具有对称的关系,而基于频率与波长的对应关系,第一光子和第二光子的波长间也具有对应的关系,具体地,如果1550nm为泵浦光脉冲波长,则两个1550nm光子会产生一个大于1550nm的光子和一个小于1550nm的光子,且这两个光子的波长与1550nm的差是相等的,例如,两个1550nm光子可以产生1530nm和1570nm的两个光子。
58.第一光子发射接收模块120用于将所述第一光子利用空间色散发射到不同空间方向,获取所述第一光子中经待测场景反射并原路返回的第一光子被第一单光子探测器探测到的时间,以作为第一探测时间。
59.需要说明的是,第一光子发射接收模块将所述第一光子利用空间色散发射到不同空间方向,是利用如衍射光栅、闪耀光栅、光学棱镜或空间光调制器等空间色散元件来实现的,第一光子在空间色散元件的作用下,不同波长的第一光子能够被发射到不同的空间方向,而通过不同空间方向对待测场景进行照射的第一光子,会被待测场景反射。
60.可以理解的是,当将第一光子经过空间色散后,第一光子基于频率向特定空间方向发射,当需要检测到由照射待测场景反射回的第一光子时,也需利用空间色散使从不同方向返回的第一光子原路返回,此时再利用第一单光子探测器就能探测到被反射回的第一光子,进而,也就能够得到被反射的第一光子被探测到的时间,即第一探测时间。
61.第二光子发射接收模块130用于将所述第二光子经过时间色散,获取经过时间色散后的所述第二光子被第二单光子探测器探测到的时间,以作为第二探测时间。
62.需要说明的是,第二光子发射接收模块将第二光子进行时间色散,而将第二光子进行时间色散,可以通过如具有大群速色散的单模光纤,长周期光栅,衍射光栅对和色散补偿模块等时间色散元件来实现。同样的,经过时间色散的第二光子也可以通过单光子探测器进行探测。
63.可以理解的是,通过时间色散后,不同波长的第二光子到达单光子探测器的时间也会不同,因此第二单光子探测器探测到第二光子的时间与第二光子的波长能够相互对应。
64.数据处理模块140用于根据所述输出时间、所述第一探测时间,以及所述第二探测时间,得到所述待测场景的三维图像。
65.需要说明的是,通过所述输出时间、第一探测时间,以及第二探测时间,得到的是造成第一光子反射的物体的深度信息的一个光子计数。
66.具体地,在本发明提供的探测场景三维信息的雷达系统中,仅利用第一光子进行待测场景的探测,降低了噪声计数事件的影响,提升了探测的灵敏度,而后,利用与第一光子频率关联的第二光子经过时间色散后被探测到的时间,泵浦光脉冲的输出时间,以及第一光子在照射待测场景后,被反射后探测到的时间,得到造成第一光子反射的待测场景的深度信息,进而得到待测场景的三维图像,实现了无需机械光束扫描的光子计数雷达功能。同时,由于摆脱了机械扫描的要求,使具有了利用芯片集成的量子光源和光量子芯片技术实现系统芯片集成的潜力,为光子计数雷达的小型化提供了可行方案。此外,照射空间的光强度仅在单光子水平,在工作时不易被目标发现,特别适合对系统隐蔽性要求高的应用场景。
67.在本发明的一个实施例中,所述量子光源模块具体包括:泵浦光脉冲、非线性光学材料和频率分发单元;
68.所述泵浦光脉冲用于照射所述非线性光学材料单元;
69.所述非线性光学材料单元用于利用入射的所述泵浦光脉冲产生频率关联光子对;
70.所述频率分发单元用于将所述频率关联光子对分离成所述第一光子和第二光子。
71.需要说明的是,频率关联光子对是通过泵浦光脉冲激励非线性光学材料单元中的自发非线性参量过程,产生的宽频谱的频率关联的光子对,对于光子对通过频率分发单元即可将组成光子对的两个光子分开,进而得到第一光子和第二光子。
72.具体地,所述非线性光学材料单元包括产生二阶参量下转换效应的非线性光学晶体和产生三阶自发四波混频效应的非线性光波导。其中,非线性光学晶体为各种非中心对称晶格结构的非线性光学晶体,包括但不限于铌酸锂晶体,周铌酸锂波导,砷化镓和磷化铟。非线性光波导包括但不限于石英光纤、硫化物玻璃光纤、硅波导和氮化硅波导。
73.在本发明的另一个实施例中,所述量子光源模块还包括光电探测模块;
74.所述光电探测模块用于根据剩余泵浦光脉冲产生包含所述输出时间的电信号,并将所述电信号输入所述数据处理模块;
75.其中,所述剩余泵浦光脉冲为激励所述非线性光学材料生成频率关联光子对后,剩余的泵浦光脉冲。
76.需要说明的是,泵浦光脉冲在产生时即带有了输出时间,即泵浦光脉冲的产生时间的信息,通过光电探测器对泵浦光脉冲进行探测,就能够得到含有输出时间的电信号,从所述电信号中能够方便的获得所述泵浦光脉冲的输出时间。
77.具体地,通过所述量子光源模块生成第一光子、第二光子以及包含输出时间的电信号的原理如图2所示,即泵浦光脉冲输入非线性光学材料单元中,生成的频率关联光子输入频率分发单元2中后,生成第一光子、第二光子,而剩余的泵浦光则经过光电探测器3后,产生包含所述输出时间的电信号。
78.在另一个实施例中,具体说明了所述第一光子发射接收模块的构成,包括:光路调整单元、空间色散元件、扩束元件和第一单光子探测器;
79.所述光路调整单元用于将所述第一光子进行准直,以得到准直光,以及将由所述空间色散元件返回的第一光子输入所述第一单光子探测器;
80.所述空间色散元件用于使所述准直光按照波长的不同向不同空间方向传播,并将由所述扩束元件返回的第一光子返回所述光路调整单元;
81.所述扩束元件用于对向不同空间方向传播的第一光子进行扩束,并将扩束后因照射所述待测场景而反射回的第一光子进行会聚后,返回所述空间色散元件;
82.所述第一单光子探测器用于探测经待测场景反射并原路返回的第一光子,以得到所述第一探测时间。
83.需要说明的是,为了进一步方便第一光子向光路调整单元发射,并在返回后进行收集,还可以在第一光子发射接收模块中设置光子发射收集元件,从而方便由量子光源模块接收第一光子,并发射至光路调整单元,以及将由光路调整单元收集的经待测场景反射回的第一光子送入第一单光子探测器。
84.具体地,以光子发射收集元件为环形器4,光路调整单元为光纤准直器5、空间色散元件为闪耀光栅6、扩束元件为透镜7,以及第一单光子探测器为单光子探测器8为例,则所述第一光子发射接收模块的工作原理如图3所示,即第一光子经过环形器4和光纤准直器5发送到空间中,经过闪耀光栅6的作用后,不同波长的光在不同空间方向传播,经透镜7扩束并照射到待测目标9的不同位置上,之后具有待测目标9空间分布的光子反射,经原路返回,通过环形器4后在环形器4另一个端口入射至单光子探测器8,得到第一光子被探测到的时间。
85.在另一个实施例中,具体说明了所述第二光子发射接收模块的构成,包括:时间色散元件和第二单光子探测器;
86.所述时间色散元件用于对所述第二光子进行时间色散;
87.所述第二单光子探测器用于探测经时间色散后的第二光子,以得到第二光子被探测到的时间。
88.需要说明的是,不同波长的第二光子经过时间色散元件后,将获得不同的延时,进而可以通过延时信息得到第二光子的波长,进而基于第二光子和第一光子的波长的相关性,得到第一光子的波长。
89.具体地,经过时间色散,宽谱的第二光子的脉冲会展宽,而展宽的时间分布与第二光子的波长存在对应的关系,即光子的到达时刻与光子的波长具有对应的关系。基于此,通过第二探测时间t2和输出时间t0的差t
2-t0,结合时间色散元件的色散量,能够计算出第二光子的波长(基于δτ=d
·
δλ,其中δτ为脉冲的展宽,d为色散元件的色散量,δλ为产生的第二光子谱宽,即经时间色散元件后第二光子的到达时间与第二光子的波长呈线性关系)。而如前所述,频率关联光子对间波长又具有对应关系,所以在得到了第二光子的波长后,就能计算由同一泵浦脉冲发射的第一光子的波长。
90.进一步地,经空间色散的第一光子因波长的不同向空间内的不同方向传播,而仅有照射到待测场景的第一光子才能被反射后经第一单光子探测器探测到,所以,为了实现对待测场景的探测,还需根据探测到的第一光子的波长得到待测场景相对于第一光子照射方向的角度信息(基于sinθ=d
·
λ,其中θ为光栅衍射角,即出射的空间角度,d为光栅角色散量,λ为产生的第一光子波长,即经光栅色散后第二光子的发射角度与波长呈线性关系),即待测场景相对于探测端的方向,之后,通过第一探测时间t1和输出时间t0的差t
1-t0,利用光子飞行时间(tof)测量的原理,就能计算出反射第一光子的物体的距离信息。由此,实现待测场景在深度和方向两个维度的信息。
91.下面结合一个具体的实例来验证上述实施例所述的一种探测场景三维信息的雷
达系统的效果。
92.在本实例中,宽谱的频率关联光子对采用飞秒脉冲激光泵浦非线性纳米硅线波导激励自发四波混频效应产生,其中使用的纳米硅线波导横截面的尺寸为450
×
220nm,长度约为11mm。之后利用光通信中广泛使用的粗波分复用器件(cwdm)对泵浦光脉冲泵浦非线性纳米硅线产生的宽广荧光谱进行滤波后形成了谱宽约14nm的信号光子(1530
±
7nm),即第一光子,以及闲频光子(1570
±
7nm),即第二光子,并且第一光子和第二光子的频率是关联的。
93.具体地,使第一光子输入如前述图3所示的示例结构,即首先利用光纤准直器将第一光子转换成空间光发射,之后通过闪耀光栅进行频率自由度向空间自由度的转换,则得到的待成像物体为如图4所示的两个不同空间位置的角锥反射体,同时,两个角锥反射体的深度位置也不同,可见,经过频率自由度向空间自由度转换后的第一光子在不同空间方向传播并照射物体的不同位置。
94.可以理解的是,由于本实例采用的是一维光栅来进行空间色散,因而第一光子照射物体的光斑形成了一条线段,跨度约4m,在横向覆盖了待成像物体的范围。
95.第二光子经过色散补偿模块作用,由第二光子的频率信息转换为第二光子的到达时间信息。可知色散补偿模块在1570nm附近的色散为2116ps,则根据闲频光子的谱宽估计的展宽后的波包宽度约为28ns,即在x方向的测量范围。
96.进一步地,本实例中对单光子的探测采用的是超导纳米线单光子探测器,对单光子事件的时间记录采用的是分辨精度约ps的时间相关单光子计数模块。通过分析输入时间t0,第一探测时间t1和第二探测时间t2,实现物体的三维“方向-深度-相对强度”成像,具体结果如图5所示,为一个典型的三维“方向-深度-相对强度”成像的测量结果。
97.下面结合图6对本发明提供的一种探测场景三维信息的方法进行说明,下文说明的一种探测场景三维信息的方法与上文描述的一种探测场景三维信息的雷达系统可相互对应参照。
98.如图6所示,该方法包括以下步骤:
99.601、利用泵浦光脉冲生成频率关联的第一光子和第二光子,并得到所述泵浦光脉冲的输出时间。
100.602、将所述第一光子经过空间色散发射到不同空间方向,获取所述第一光子中经待测场景反射并原路返回的所述第一光子被第一单光子探测器探测到的时间,以作为第一探测时间。
101.603、将所述第二光子经过时间色散,获取经过时间色散后的所述第二光子被第二单光子探测器探测到的时间,以作为第二探测时间。
102.604、根据所述输出时间、所述第一探测时间,以及所述第二探测时间,得到所述待测场景的三维图像。
103.本发明的一种探测场景三维信息的方法,一方面利用频率关联的第一光子和第二光子之间的量子关联筛选单光子探测数据,从而降低噪声计数事件的影响,提升了探测的灵敏度;另一方面,利用第一光子和第二光子之间的频率关联特性,实现了无需机械光束扫描的光子计数雷达功能。同时,由于摆脱了机械扫描的要求,使具有了利用芯片集成的量子光源和光量子芯片技术实现系统芯片集成的潜力,为光子计数雷达的小型化提供了可行方
案。此外,照射空间的光强度仅在单光子水平,在工作时不易被目标发现,特别适合对系统隐蔽性要求高的应用场景。
104.在本发明的一个实施例中,具体说明了所述频率关联的第一光子和第二光子的获得方法,即包括:
105.利用所述泵浦光脉冲激励非线性光学材料,生成频率关联光子对;
106.将所述频率关联光子对通过光学滤波,分离成所述第一光子和第二光子。
107.需要说明的是,频率关联光子对是通过泵浦光脉冲激励非线性光学材料中的自发非线性参量过程,产生的宽频谱的频率关联的光子对,而后通过光学滤波,即频率分发,即可将组成光子对的两个光子分开,进而得到第一光子和第二光子。
108.可以理解的是,泵浦光脉冲的输出时间通过人工或机器均可以进行记录,而采用机器进行输出时间的获得更为方便且准确。
109.基于此,在本发明的另一个实施例中,通过将激励所述非线性光学材料生成频率关联光子对后,剩余的泵浦光脉冲经过光电探测,得到包含所述输出时间的电信号;而后由所述电信号得到所述输出时间。
110.需要说明的是,泵浦光脉冲在产生时即带有了输出时间即泵浦光脉冲的产生时间的信息,通过光电探测器对泵浦光脉冲进行探测,就能够得到含有输出时间的电信号,从所述电信号中能够方便的获得所述泵浦光脉冲的输出时间。
111.在本发明的另一个实施例中,所述根据所述输出时间、第一探测时间,以及第二探测时间,得到所述待测场景的三维图像,进一步包括:
112.根据所述输出时间、所述第二探测时间和时间色散的色散量,得到所述第二光子的波长;
113.根据所述第二光子的波长和所述泵浦光脉冲的波长,得到所述第一光子的波长;
114.根据所述第一光子的波长得到所述待测场景相对于所述第一光子照射方向的角度信息;
115.根据所述第一光子的波长、所述输出时间和所述第一探测时间,得到所述待测场景的深度信息。
116.可以理解的是,随泵浦光脉冲的波长的不同,生成的第一光子和第二光子的波长也会有所不同,由同一泵浦光脉冲生成的第一光子仅能得到在一个特定方向上照射待测场景得到的方向和深度信息。
117.基于此,考虑到提高探测得到的待测场景的三维信息的准确度,在本发明的另一个实施例中,周期性的利用泵浦光脉冲生成频率关联的第一光子和第二光子;
118.而后使得在根据所述输出时间、第一探测时间,以及第二探测时间,得到所述待测场景的三维图像之后,所述探测场景三维信息的方法还包括:
119.将当前周期得到的所述待测场景的三维图像与至少一个历史周期得到的所述待测场景的三维图像进行融合。
120.需要说明的是,每个周期得到的均是一个特定的第一光子照射方向和相应的深度信息,所以,将各个周期得到的第一光子照射方向进行统计时,就能得到第一光子在所有可能的空间照射方向上不同深度的光子计数,即可得到不同空间照射方向上的物理反射面深度信息,提高了光子计数雷达的功能,也就是更精确的探测到所述待测场景的三维图像。
121.可以理解的是,整个待测场景的深度信息,根据各个周期内的待测场景的深度信息得到,这就需要保证每个周期内得到的时间信息均是完整的,所以在根据输出时间、第一探测时间,以及第二探测时间得到单个周期内所述待测场景的三维图像前,首先需要进行数据的筛选,即当一个泵浦光脉冲周期中,同时得到了输出时间t0,第一探测时间t1和第二探测时间t2时,这一组数据才能被选择出并记录为有效符合数据,之后再通过对每组有效符合数据进行处理,得到单个周期内所述待测场景的三维图像。
122.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1